






卡尔曼滤波(Kalman Filter)核心原理与应用指南
1. 背景
卡尔曼滤波(Kalman Filter)是一种递归状态估计算法,由鲁道夫·卡尔曼(Rudolf Kalman)于1960年提出,最初用于解决阿波罗飞船的导航问题。其核心目标是在存在不确定性的动态系统中,融合多源噪声数据,实现最优状态估计。
历史背景与设计动机:
在航天、制导等场景中,传感器(如陀螺仪、加速度计)的测量值存在噪声(Noise),且系统本身受随机扰动影响。传统滤波方法(如移动平均)无法处理动态系统的状态变化。例如,火箭轨迹预测需同时结合运动模型(物理规律)和实时观测数据,但两者均不完美。卡尔曼滤波通过概率框架将模型预测(Prediction)与观测更新(Update)融合,得到比单一数据源更精确的估计结果。
示例:GPS 定位时,设备移动速度与卫星信号存在噪声。若仅依赖卫星数据,定位点会跳跃;仅用运动模型会累积误差。卡尔曼滤波将两者结合,输出平滑轨迹。
2. 技术原理
基于贝叶斯概率框架和最小均方误差(MMSE)准则,通过“预测-更新”循环迭代优化估计值。
系统用两个方程描述:
-
状态方程(State Equation):
x k = F k x k − 1 + B k u k + w k \mathbf{x}_k = \mathbf{F}_k \mathbf{x}_{k-1} + \mathbf{B}_k \mathbf{u}_{k} + \mathbf{w}_k xk=Fkxk−1+Bkuk+wk
其中 x k \mathbf{x_k} xk 是状态向量, F k \mathbf{F_k} Fk 是状态转移矩阵, u k \mathbf{u_k} uk 是控制输入, w k ∼ N ( 0 , Q k ) \mathbf{w_k} \sim \mathcal{N}(0, \mathbf{Q_k}) wk∼N(0,Qk) 是过程噪声。 -
观测方程(Observation Equation):
z k = H k x k + v k \mathbf{z}_k = \mathbf{H}_k \mathbf{x}_k + \mathbf{v}_k zk=Hkxk+vk
其中 z k \mathbf{z_k} zk 是观测值, H k \mathbf{H_k} Hk 是观测转移矩阵, v k ∼ N ( 0 , R k ) \mathbf{v_k} \sim \mathcal{N}(0, \mathbf{R_k}) vk∼N(0,Rk) 是观测噪声。 -
状态估计方程与观测估计方程:
x ^ k = F k x ^ k − 1 + B k u k z ^ k = H k x ^ k \begin{equation*} \begin{aligned} \hat{\mathbf{x}}_k &= \mathbf{F}_k \hat{\mathbf{x}}_{k-1} + \mathbf{B}_k \mathbf{u}_{k} \\ \hat{\mathbf{z}}_k &= \mathbf{H}_k \hat{\mathbf{x}}_k \end{aligned} \end{equation*} x^kz^k=Fkx^k−1+Bkuk=Hkx^k
卡尔曼滤波主要分为预测与更新阶段:
预测阶段(Prior Estimate)
基于
k
−
1
k-1
k−1 时刻的后验估计,预测
k
k
k 时刻的状态和不确定性(通过协方差描述不确定性):
状态预测:
x
^
k
−
=
F
k
x
^
k
−
1
+
B
k
u
k
协方差预测:
P
k
−
=
F
k
P
k
−
1
+
F
k
T
+
Q
k
\begin{align} \text{状态预测:} \quad & \hat{\mathbf{x}}_k^- = \mathbf{F}_k \hat{\mathbf{x}}_{k-1} + \mathbf{B}_k \mathbf{u}_{k} \\ \text{协方差预测:} \quad & \mathbf{P}_k^- = \mathbf{F}_k \mathbf{P}_{k-1}^+ \mathbf{F}_k^T + \mathbf{Q}_k \end{align}
状态预测:协方差预测:x^k−=Fkx^k−1+BkukPk−=FkPk−1+FkT+Qk
物理意义:
- 式 (1):用系统模型 F k \mathbf{F}_k Fk 和控制输入 u k \mathbf{u}_{k} uk 预测新状态。
- 式 (2):预测的不确定性 P k \mathbf{P}_k Pk 来自模型传播 F k P k − 1 + F k T \mathbf{F}_k \mathbf{P}_{k-1}^+ \mathbf{F}_k^T FkPk−1+FkT 和过程噪声协方差矩阵 Q k \mathbf{Q}_k Qk。
P
\mathbf{P}
P 是估计误差的协方差矩阵(Estimation Error Covariance Matrix):
P
k
=
cov
(
e
k
)
=
E
[
e
k
e
k
T
]
\mathbf{P}_k = \text{cov}(\mathbf{e}_k) = E\left[ \mathbf{e}_k \mathbf{e}_k^T \right]
Pk=cov(ek)=E[ekekT]
其中:
- e k = x k − x ^ k \mathbf{e}_k = \mathbf{x}_k - \hat{\mathbf{x}}_k ek=xk−x^k 是 状态估计误差(真实状态 x k \mathbf{x}_k xk 与估计值 x ^ k \hat{\mathbf{x}}_k x^k 的差值)。
- cov ( ⋅ ) \text{cov}(\cdot) cov(⋅) 表示协方差矩阵。
- E [ ⋅ ] E[\cdot] E[⋅] 表示期望值(概率平均)。
更新阶段(Posterior Estimate)
获得测量
z
k
\mathbf{z}_k
zk 后,融合预测与测量,计算当前的状态估计:
卡尔曼增益:
K
k
=
P
k
H
k
T
(
H
k
P
k
H
k
T
+
R
k
)
−
1
状态更新:
x
^
k
+
=
x
^
k
−
+
K
k
(
z
k
−
H
k
x
^
k
−
)
协方差更新:
P
k
+
=
(
I
−
K
k
H
k
)
P
k
−
\begin{align} \text{卡尔曼增益:} \quad & \mathbf{K}_k = \mathbf{P}_k \mathbf{H}_k^T (\mathbf{H}_k \mathbf{P}_k \mathbf{H}_k^T + \mathbf{R}_k)^{-1} \\ \text{状态更新:} \quad & \hat{\mathbf{x}}_k^+ = \hat{\mathbf{x}}_k^- + \mathbf{K}_k (\mathbf{z}_k - \mathbf{H}_k \hat{\mathbf{x}}_k^-) \\ \text{协方差更新:} \quad & \mathbf{P}_k^+ = (\mathbf{I} - \mathbf{K}_k \mathbf{H}_k) \mathbf{P}_k^- \end{align}
卡尔曼增益:状态更新:协方差更新:Kk=PkHkT(HkPkHkT+Rk)−1x^k+=x^k−+Kk(zk−Hkx^k−)Pk+=(I−KkHk)Pk−
物理意义:
- 式 (3):计算权重 K k \mathbf{K}_k Kk。分母 H k P k − H k T + R k \mathbf{H}_k \mathbf{P}_k^- \mathbf{H}_k^T + \mathbf{R}_k HkPk−HkT+Rk 是新息协方差(预测与测量的联合不确定性)。
- 式 (4):用 K k \mathbf{K}_k Kk 加权修正预测值。 ( z k − H k x ^ k − ) (\mathbf{z}_k - \mathbf{H}_k \hat{\mathbf{x}}_k^-) (zk−Hkx^k−) 称为新息(测量残差)。
- 式 (5):更新后的不确定性 P k + \mathbf{P}_k^+ Pk+ 因融合信息而减小 ( I − K k H ( \mathbf{I} - \mathbf{K}_k \mathbf{H} (I−KkH 的作用)。
关键直观理解
-
卡尔曼增益 K k \mathbf{K}_k Kk:
- 若传感器精度高( R → 0 \mathbf{R} \to 0 R→0),则 K k ≈ H k − 1 \mathbf{K}_k \approx \mathbf{H}_k^{-1} Kk≈Hk−1 → 更信任测量。
- 若模型精度高( P k − → 0 \mathbf{P}_k^- \to 0 Pk−→0),则 K k → 0 \mathbf{K}_k \to 0 Kk→0 → 更信任预测。
-
协方差更新:
P k + \mathbf{P}_k^+ Pk+ 总是 ≤ P k − \mathbf{P}_k^- Pk−(矩阵半正定序),表明融合后不确定性降低。 -
最优性:
在线性高斯系统中,卡尔曼滤波给出最小均方误差估计(MMSE)。
注:实际应用中需初始化 x ^ 0 + \hat{\mathbf{x}}_0^+ x^0+ 和 P 0 + \mathbf{P}_0^+ P0+,并循环执行预测-更新。
3. 功能特征
核心功能 1:多源数据融合(Sensor Fusion)
场景:自动驾驶中融合雷达(准确测距但噪声大)和摄像头(高分辨率但受光照影响)。
卡尔曼滤波将两者数据加权融合,输出鲁棒性更高的目标位置估计。
核心功能 2:动态噪声过滤(Dynamic Noise Filtering)
场景:无人机姿态估计。陀螺仪高频噪声小但存在漂移,加速度计低频噪声大但无漂移。
卡尔曼滤波结合两者优势,实时输出平滑的姿态角。
其他应用:
- 金融时间序列预测
- 机器人 SLAM(Simultaneous Localization and Mapping)
- 医疗信号处理(如 ECG 去噪)
4. 应用示例
示例:一维小车位置跟踪
假设小车匀速运动,用带噪声的 GPS 观测位置。
import numpy as np
import matplotlib.pyplot as plt
# 系统参数
dt = 1.0 # 时间间隔
F = np.array([[1, dt], [0, 1]]) # 状态转移矩阵 (位置+速度)
H = np.array([[1, 0]]) # 观测矩阵 (只观测位置)
Q = np.diag([0.1, 0.01]) # 过程噪声协方差
R = np.array([[10]]) # 观测噪声协方差
# 初始化
x_est = np.array([0, 0]) # 初始状态 [位置, 速度]
P_est = np.eye(2) # 初始协方差矩阵
# 模拟数据
true_pos = np.array([t * 2 for t in range(1, 11)]) # 真实位置: 匀速运动
z_obs = true_pos + np.random.normal(0, np.sqrt(R[0,0]), 10) # 带噪声观测
# 卡尔曼滤波
estimates = []
for z in z_obs:
# 预测步骤
x_pred = F @ x_est
P_pred = F @ P_est @ F.T + Q
# 更新步骤
K = P_pred @ H.T @ np.linalg.inv(H @ P_pred @ H.T + R)
x_est = x_pred + K @ (z - H @ x_pred)
P_est = (np.eye(2) - K @ H) @ P_pred
estimates.append(x_est[0])
# 可视化
plt.plot(true_pos, 'g-', label="True Position")
plt.plot(z_obs, 'ro', label="Noisy Observations")
plt.plot(estimates, 'b--', label="Kalman Estimates")
plt.legend()
plt.title("1D Kalman Filter Tracking")
plt.show()
输出效果:
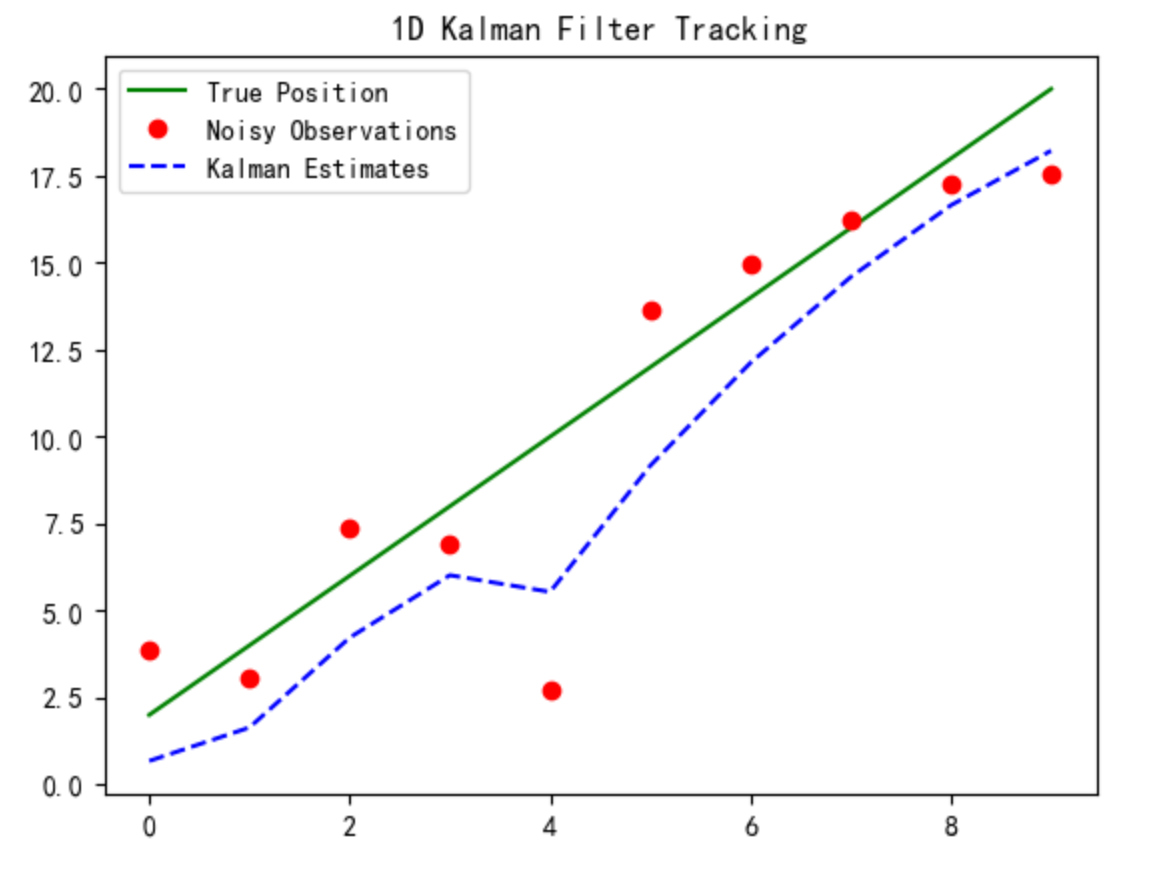
蓝色虚线(卡尔曼估计)比红色散点(观测值)更贴近绿色真实轨迹,有效过滤噪声。
5. 与其它技术对比
| 特性 | 卡尔曼滤波 | 移动平均(Moving Average) | 粒子滤波(Particle Filter) |
|---|---|---|---|
| 适用系统 | 线性高斯系统 | 静态序列 | 非线性/非高斯系统 |
| 计算复杂度 | 低 ( O ( n 2 ) O(n^2) O(n2)) | 极低 ( O ( n ) O(n) O(n)) | 高 ( O ( N ⋅ n ) O(N \cdot n) O(N⋅n)) |
| 实时性 | 优秀 | 优秀 | 较差 |
| 内存占用 | 低(仅存储矩阵) | 低 | 高(存储粒子群) |
| 多传感器融合支持 | 原生支持 | 不支持 | 支持 |
6. 类似技术
- 扩展卡尔曼滤波(Extended Kalman Filter, EKF)
- 通过泰勒展开线性化非线性系统,适用于弱非线性场景(如机器人运动学)。
- 粒子滤波(Particle Filter)
- 基于蒙特卡洛采样,适用于强非线性/非高斯系统(如目标跟踪中的遮挡处理)。
7. 总结
卡尔曼滤波是动态系统状态估计的基石算法,通过高效融合模型预测与噪声观测,在航空航天、自动驾驶等领域不可替代。其哲学启示:
官方资源:
“在不确定的世界中,迭代优化是逼近真理的最佳路径。”——Kalman Filter 通过预测-更新循环动态融合系统模型与观测数据,在先验知识与实时测量间取得平衡。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









