




 本文介绍了嵌入式开发中常见的三种通信总线UART、SPI和I2C,包括各自的特点和应用场景。UART作为通用外设,常用于开发调试;SPI是高速全双工串行总线,适用于多设备连接;I2C则是低速、双向通信总线,适合于主从结构。文章通过代码示例展示了如何在STM32中配置这些通信接口,并讨论了它们的数据传输方式和模式选择。
本文介绍了嵌入式开发中常见的三种通信总线UART、SPI和I2C,包括各自的特点和应用场景。UART作为通用外设,常用于开发调试;SPI是高速全双工串行总线,适用于多设备连接;I2C则是低速、双向通信总线,适合于主从结构。文章通过代码示例展示了如何在STM32中配置这些通信接口,并讨论了它们的数据传输方式和模式选择。
人生中的第一篇偏技术的文章
这两年主要从事嵌入式应用层的开发,对驱动层了解的不是很透彻,第一篇文章也不知道该写点神魔,那就从几个常用的通信总线开始吧,一方面算是给自己的学习经历添点痕迹(也算是重新学习的过程),二是以后回顾知识点也有个熟悉的资料,方便查阅。以后的内容有自己的想法(可能不对,还请指正,我尽量多查看一下书籍,争取总结正确),也会引用别人的一些见解,我尽量标明出处(链接),防止我断章取义,好让同志们(也可能就我自己看而已,假设有别人浏览吧)查找内容的源头。不BB了,是骡子是马拉出来遛遛吧。
STM32中几种通信方式的区别:
1.UART(USART)
2.IIC总线
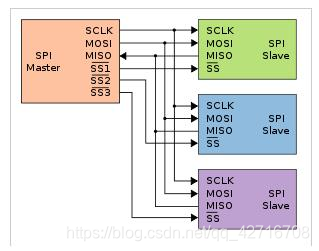
3.SPI总线
对博主表示感谢。
UART、SPI、I2C对比
| 对比项 | UART | SPI | I2C |
| 信号线数目 | 3根,RX、TX、GND | 4根,SDO、SDI、SCLK、SS | 2根,SDA、SCLK |
| 设备从属关系 | —— | 存在主从设备。SPI用片选信号选择从机 | 存在主从设备。IIC用地址选择从机。 |
| 通信方式 | 全双工通信 | 全双工通信 | 半双工通信 |
| 通信速率 | 速度慢 | 比I2C总线要快,速度可达到几Mbps | I2C的速度比SPI慢 |
| 应用领域 | 1、UART常用于控制计算机与串行设备的芯片 2、就是我们经常所说的串口,基本都用于调试。 |
主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间 | I2C一般是用在同一个板子上的2个IC之间的通信 ,它可以替代标准的并行总线,连接各种集成电路和功能模块。 |
| 传输距离 | I2C需要有双向IO的支持,而且使用上拉电阻,抗干扰能力较弱,一般用于同一板卡上芯片之间的通信,较少用于远距离通信 | ||
| 通信特征 | 异步,一帧可以传5/6/7/8位 | 同步,SPI允许数据一位一位的传送,甚至允许暂停。从最高位开始传。 | 同步,电平信号,一次连续8bit。从最高位开始传 |
| 协议复杂度 | 结构比较复杂 | SPI实现要比UART简单,UART需要固定的波特率,就是说两位数据的间隔要相等,而SPI则无所谓,因为它是有时钟的协议。 | 协议比SPI复杂,但是连线比标准的SPI要少 |
| 对比 | 在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。 在多个从器件的系统中,每个从器件需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。 |
USART简介:通用同步异步收发器,全双工数据交换,UART,异步通信,为常用外设,用作开发调试。
代码如下:
/**
* @brief USART GPIO 配置,工作参数配置
* @param 无
* @retval 无
*/
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/**
* @brief 配置嵌套向量中断控制器NVIC
* @param 无
* @retval 无
*/
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置USART为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
// 串口中断服务函数
void DEBUG_USART_IRQHandler(void)
{
uint8_t ucTemp;
if(USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET)
{
buffer[num] = USART_ReceiveData(DEBUG_USARTx);
// USART_SendData(DEBUG_USARTx,buffer[num]);
num ++;
if(num==10)
{
for(num=0;num<10;num++)
{
Delay(20);//在发送两个数据的间隙需要一定的时间。
Usart_SendByte(DEBUG_USARTx,buffer[num]);
Delay(20);
}
num = 0;
}
}
}
uint16_t USART_ReceiveData(USART_TypeDef* USARTx)//串口接收数据函数,直接读取的USART的数据寄存器。
{
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
/* Receive Data */
return (uint16_t)(USARTx->DR & (uint16_t)0x01FF);
}
/***************** 发送一个字节 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
assert_param(IS_USART_DATA(Data));
/* Transmit Data */
USARTx->DR = (Data & (uint16_t)0x01FF);
}
串口也就这些东西,自从有了固件库,开发就变得很容易了,只要懂得原理,代码不需要写太多,只要将一些问题想全面,考虑上一些特殊的情况,软件上做一些保护尽量避免发生问题。
SPI简介:高速全双工的串行总线。
(1)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5467
5467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









