







 本文详细介绍了相机标定的过程,包括求解内外参数、畸变矫正等步骤,并提供了代码实现。通过准备标定图片、图像预处理、提取角点、调用opencv的calibrateCamera函数计算内外参数,以及评估重投影误差,展示了相机标定的基本流程。此外,博主分享了实验所用的靶标图像和椭圆中心坐标文本,供读者实践使用。
本文详细介绍了相机标定的过程,包括求解内外参数、畸变矫正等步骤,并提供了代码实现。通过准备标定图片、图像预处理、提取角点、调用opencv的calibrateCamera函数计算内外参数,以及评估重投影误差,展示了相机标定的基本流程。此外,博主分享了实验所用的靶标图像和椭圆中心坐标文本,供读者实践使用。
网上绝大部分博客关于相机标定的讲解全都关于理论上的,很少有代码的实现。因此,打算写这篇博客。博客并不涉及相关公式推导,假设大家都已经懂三大世界坐标系、内外参等名词含义。
一:相机标定的作用
(1):求解内外参数。
(2):用于处理畸变矫正。
二:标定的流程
(1):准备若干张标定图片(至少四张)
(2):图像预处理,清除图像上无关的轮廓信息
(3):提取角点信息。(同心圆的圆心即为角点)
(4):调用相机标定函数
(5):计算重投影误差
2.1:
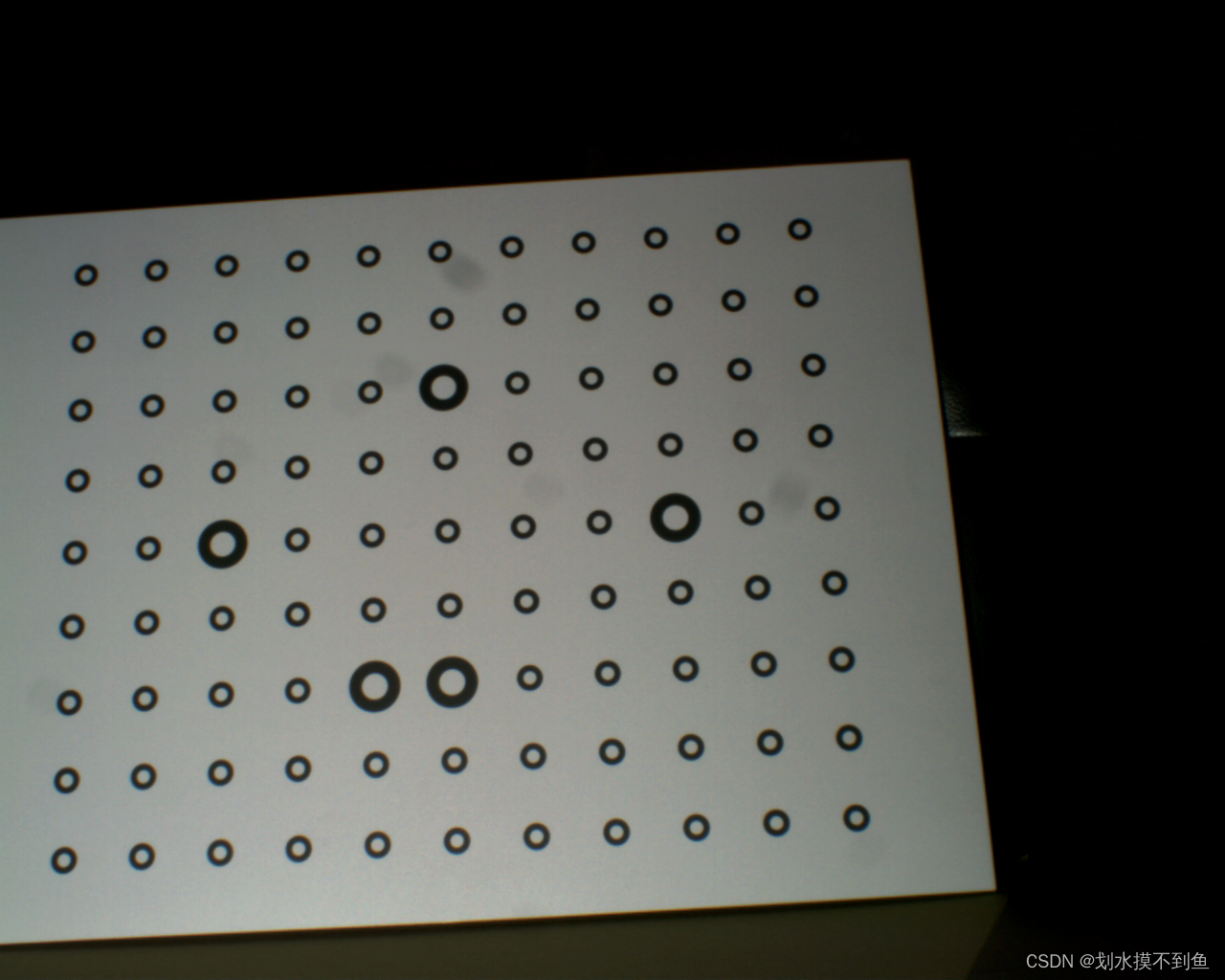
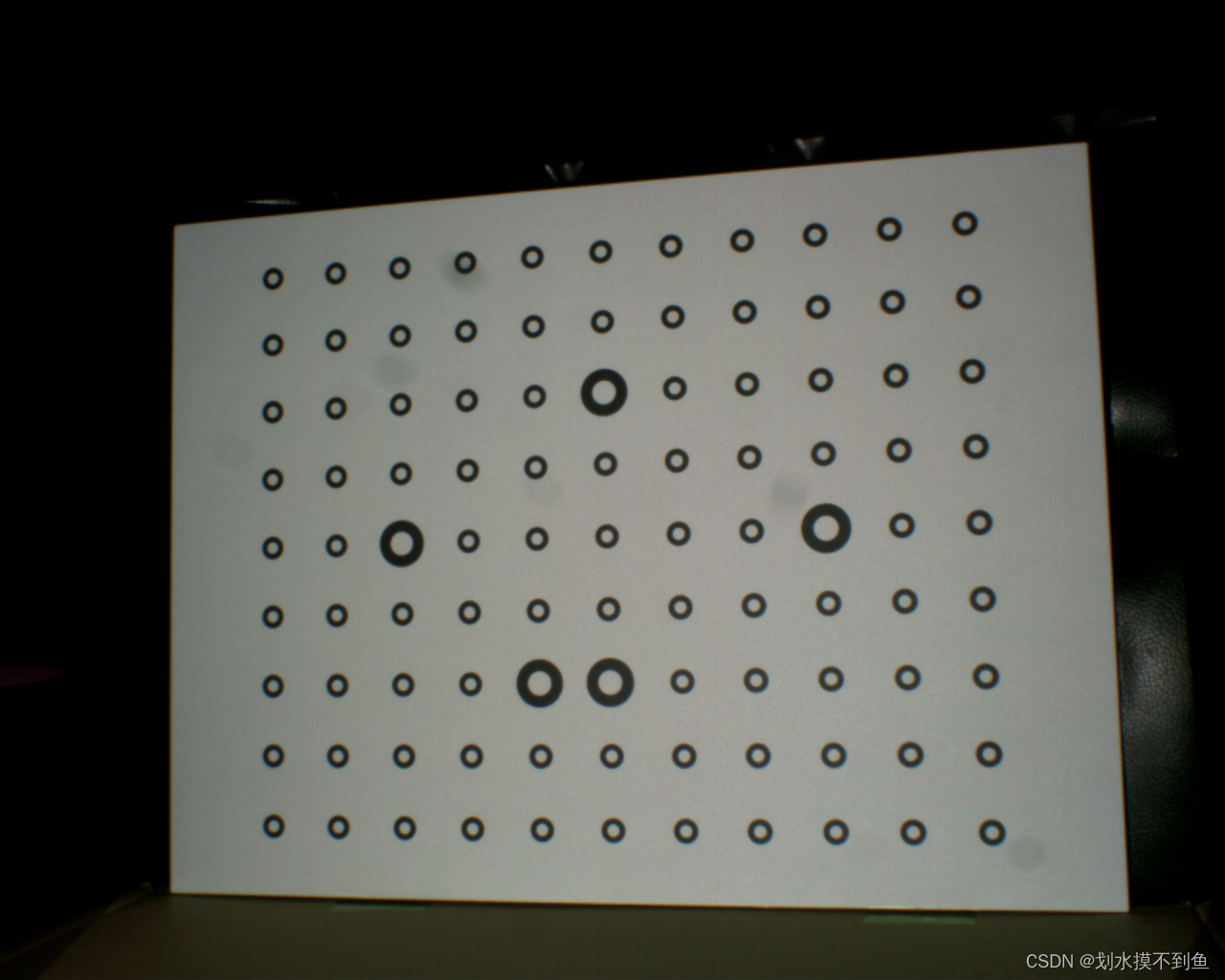
实验所用的靶标图像如下所示,在相机标定实验中一般要求图片最少为四张。在文章最后,我会给出本实验所用的图像,方便大家使用。
2.2:
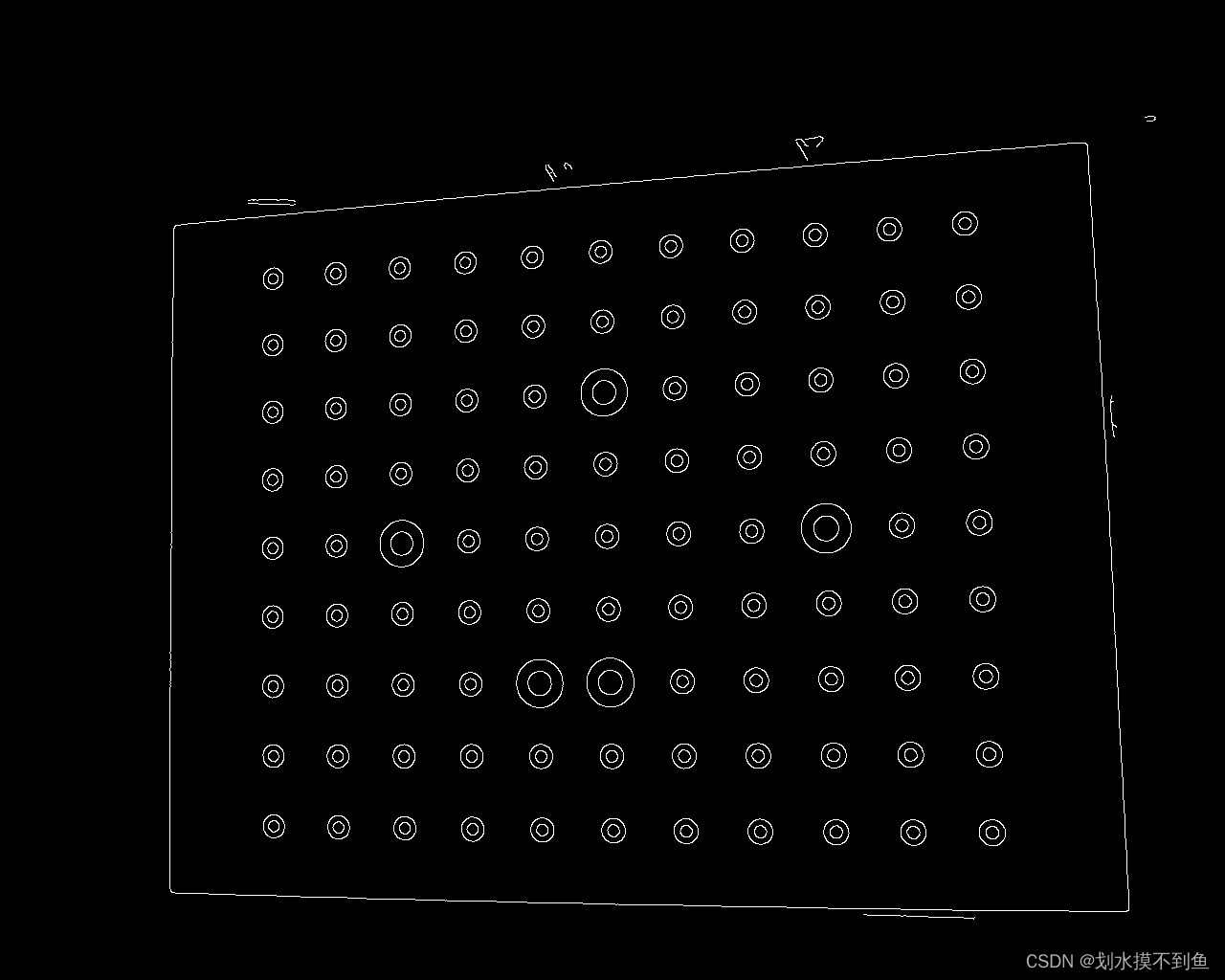
下图为输入的靶标图像Canny后的效果,可以看到,图像上有许多干扰的边缘轮廓,我们仅仅是对图像上11*9的同心圆轮廓感兴趣,因此需要进行图像预处理操作。具体的操作打算在另一篇博客里进行阐述,此处简单了解一下。
2.3:
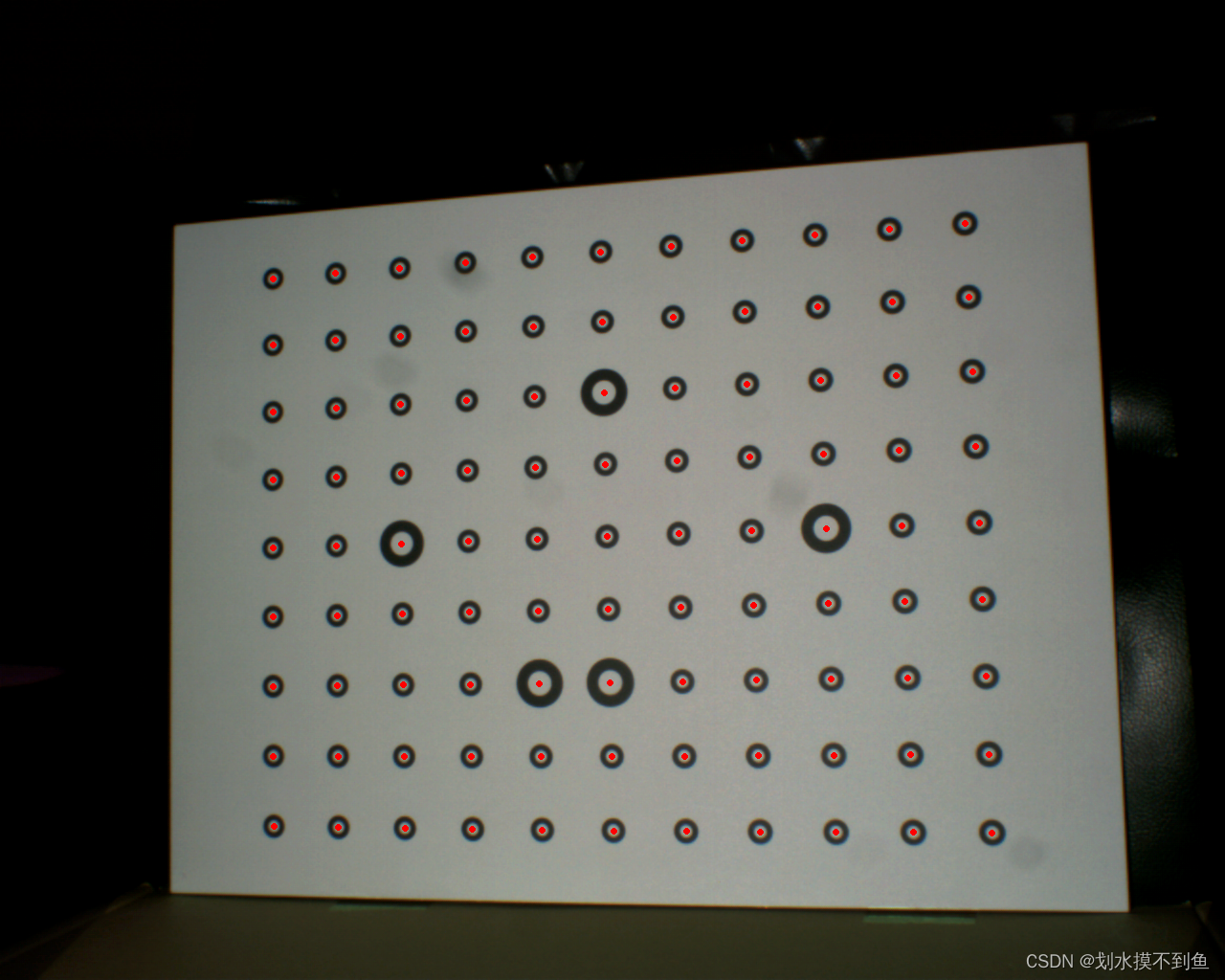
在图像预处理之后,利用opencv中的fitEllipse椭圆拟合函数,得到同心圆的中心坐标。并在原始图像上画了出来,我已经把此次标定实验所提取的中心坐标存放到了文本当中,会附录在百度云盘里。
2.4:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8210
8210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









