







前言
本文为对Map集合的再一次整理。内容包括:Map HashMap LinkedHashMap TreeHashMap HashTable ConcurrentHashMap
Map
Map<k,v>使用键值对存储,map会维护与键k相关联的值v。两个key可以关联相同的对象,但key不能重复,常见的key是String类型,但也可以是任何对象。通过键就可以找到对应的值,这种数据结构就是Map(映射)
Map接口中定义的方法:
void clear()
//删除所有的映射
default V compute(K key, BiFunction<? super K,? super V,? extends V> remappingFunction)
//尝试计算指定键的映射及其当前映射的值(如果没有当前映射, null )。
default V computeIfAbsent(K key, Function<? super K,? extends V> mappingFunction)
/*如果指定的键尚未与值相关联(或映射到 null ),则尝试使用给定的映射函数计算其值,并将其输入到此/映射中,除非 null 。 */
default V computeIfPresent(K key, BiFunction<? super K,? super V,? extends V> remappingFunction)
//如果指定的密钥的值存在且非空,则尝试计算给定密钥及其当前映射值的新映射。
boolean containsKey(Object key)
//如果此映射包含指定键的映射,则返回 true 。
boolean containsValue(Object value)
//如果此map将一个或多个键映射到指定的值,则返回 true 。
Set<Map.Entry<K,V>> entrySet()
//返回此map中包含的映射的Set视图。
boolean equals(Object o)
//将指定的对象与此映射进行比较以获得相等性。
default void forEach(BiConsumer<? super K,? super V> action)
//对此映射中的每个条目执行给定的操作,直到所有条目都被处理或操作引发异常。
V get(Object key)
//返回到指定键所映射的值,或 null
default V getOrDefault(Object key, V defaultValue)
//返回到指定键所映射的值,或 defaultValue
int hashCode()
//返回此map的哈希码值。
boolean isEmpty()
//如果此map不包含键值映射,则返回 true 。
Set<K> keySet()
//返回此map中包含的键的Set视图。
default V merge(K key, V value, BiFunction<? super V,? super V,? extends V> remappingFunction)
//如果指定的键尚未与值相关联或与null相关联,则将其与给定的非空值相关联。
V put(K key, V value)
//将指定的值与该映射中的指定键相关联(可选操作)。
void putAll(Map<? extends K,? extends V> m)
//将指定map的所有映射复制到此映射(可选操作)。
default V putIfAbsent(K key, V value)
/*如果指定的键尚未与某个值相关联(或映射到 null )将其与给定值相关联并返回null,否则返回当前值。 */
V remove(Object key)
//如果存在(从可选的操作),从该map中删除一个键的映射。
default boolean remove(Object key, Object value)
//仅当指定的密钥当前映射到指定的值时删除该条目。
default V replace(K key, V value)
//只有当目标映射到某个值时,才能替换指定键的条目。
default boolean replace(K key, V oldValue, V newValue)
//仅当当前映射到指定的值时,才能替换指定键的条目。
default void replaceAll(BiFunction<? super K,? super V,? extends V> function)
//将每个条目的值替换为对该条目调用给定函数的结果,直到所有条目都被处理或该函数抛出异常。
int size()
//返回此map中键值映射的数量。
Collection<V> values()
//返回此map中包含的值的Collection视图。
Map的实现类
线程不安全实现类
1.HashMap
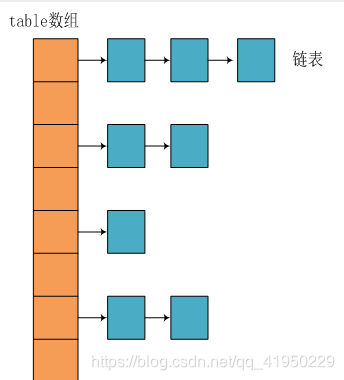
JDK1.8 之前 HashMap 底层是 数组和链表 结合在一起使用也就是 链表散列。HashMap 通过 key 的 hashCode 经过扰动函数(所谓扰动函数指的就是 HashMap 的 hash 方法。使用 hash 方法也就是扰动函数是为了防止一些实现比较差的 hashCode() 方法 换句话说使用扰动函数之后可以减少碰撞。)处理过后得到 hash 值,然后通过 (n - 1) & hash 判断当前元素存放的位置(这里的 n 指的是数组的长度),如果当前位置存在元素的话,就判断该元素与要存入的元素的 hash 值以及 key 是否相同,如果相同的话,直接覆盖,不相同就通过拉链法解决冲突。数据结构如下图:
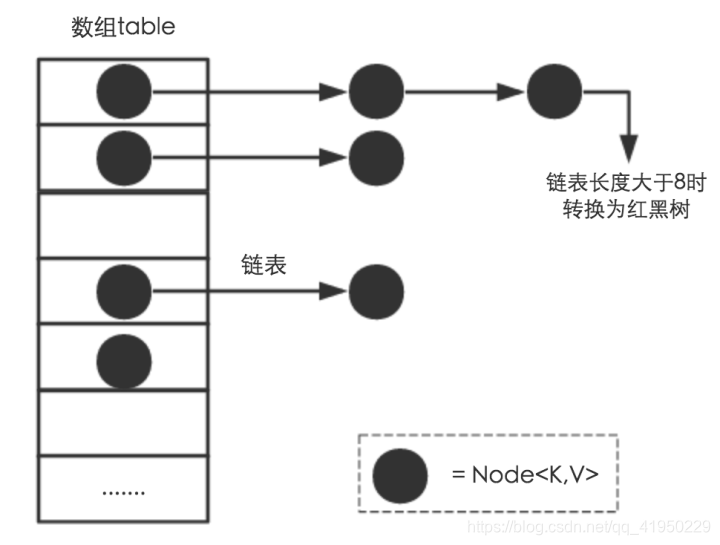
JDK1.8 以后的 HashMap 在解决哈希冲突时有了较大的变化,当链表长度大于阈值(默认为8)时,将链表转化为红黑树,以减少搜索时间。数据结构图如下:
HashMap最多只允许一条记录的键为null,允许多条记录的值为null。HashMap非线程安全,即任一时刻可以有多个线程同时写HashMap,可能会导致数据的不一致。如果需要满足线程安全,可以用 Collections的synchronizedMap方法使HashMap具有线程安全的能力,或者使用ConcurrentHashMap。
HashMap的初始化源码:
public class HashMap<K,V> extends AbstractMap<K,V>
implements Map<K,V>, Cloneable, Serializable {
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4; // aka 16
static final int MAXIMUM_CAPACITY = 1 << 30;
static final float DEFAULT_LOAD_FACTOR = 0.75f;
transient Node<K,V>[] table; // 节点数组
final float loadFactor; // 加载因子也称填充因子
int threshold; // 阀值,计算:threshold = loadFactor * capcity(节点数组容量)
...
public HashMap() {
this.loadFactor = DEFAULT_LOAD_FACTOR; // all other fields defaulted
}
public HashMap(int initialCapacity) {
this(initialCapacity, DEFAULT_LOAD_FACTOR);
}
public HashMap(int initialCapacity, float loadFactor) {
if (initialCapacity < 0)
throw new IllegalArgumentException("Illegal initial capacity: " +
initialCapacity);
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
if (loadFactor <= 0 || Float.isNaN(loadFactor))
throw new IllegalArgumentException("Illegal load factor: " +
loadFactor);
this.loadFactor = loadFactor;
this.threshold = tableSizeFor(initialCapacity);
}
static final int tableSizeFor(int cap) {
int n = cap - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}
}
从源码中可以看到:
- DEFAULT_INITIAL_CAPACITY = 1 << 4;节点数组默认大小为16,这里使用位运算,相比乘法运算性能更快。
- Node<K,V>[] table,节点数组(也叫桶数组),就相当于是链表中的节点。需要注意的是Node类中的K是使用final关键字修饰的,也就说明了Map中的键(key)是不能修改的。
- threshold :阀值,计算方式为threshold = loadFactor * capcity(节点数组容量),当节点数组的使用容量超过阀值时就会以2的幂次方扩充节点数组。
- HashMap空参初始化的时候并没有初始化节点数组,而只是设置了默认的加载因子,初始化大小会在第一次调用put方法后调用resize()方法进行初始化,其实数组的扩容也是调用这个方法进行的。
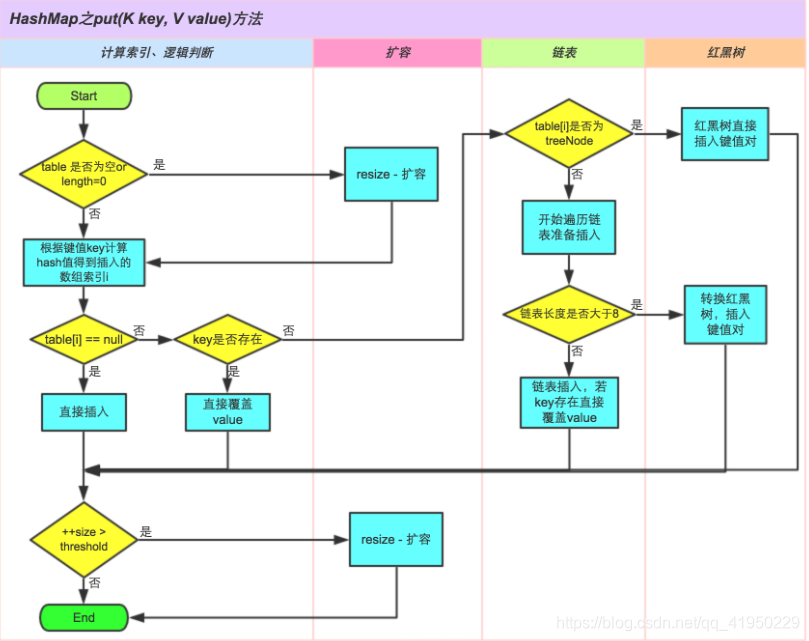
HashMap的put方法
HashMap的put方法的源码有些多和难以理解(这里就不展示和解读了,感兴趣的可以自己去看源码),我们看一张java8中put方法的处理逻辑图:
这里我们重点说说resize()方法,在两个地方会调用到resize方法:
- 当节点数组table为null时,会调用resize方发完成初始化
- 当节点数组table使用的容量大于阀值threshold时会调用resize方法扩容。
看看resize方法的部分源码:
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
if (oldCap > 0) {
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
...
}
从源码中我们可以看到,初始化时table为空,紧接着就执行newCap = DEFAULT_INITIAL_CAPACITY;初始化新的容量newCap大小为默认容量大小16,最后再new一个容量为16的节点数组再将成员变量中的节点数组table的引用指向新的节点数组。所以说HashMap是在执行put()方法才初始化数组大小的。
我们看当oldCap>0,容量大于等于默认值且未超过最大值时,会通过newCap = oldCap << 1 和newThr = oldThr << 1; 将容量和加载因子都扩大一倍。也就是说,HashMap的扩容机制就是重新申请一个容量是当前的2倍的节点数组,然后将原先的记录逐个重新映射到新的节点数组里面,然后将原先的节点数组里的节点逐个置为null使得引用失效。
剩余部分的代码就是通过新插入的节点(每一个put(key,value)都会被封装成一个节点)通过e.hash & (newCap - 1)找到节点数组的下标判断是否有值…自己看图。
为什么HashMap是不安全的?
其实HashMap之所以线程不安全就是出在了这个resize方法上,在resize操作的时候会造成线程不安全,如:put的时候导致的多线程数据不一致。
这个问题比较好想象,比如有两个线程A和B,首先A希望插入一个key-value对到HashMap中,首先计算记录所要落到的桶的索引坐标,然后获取到该桶里面的链表头结点,此时线程A的时间片用完了,而此时线程B被调度得以执行,和线程A一样执行,只不过线程B成功将记录插到了桶里面,假设线程A插入的记录计算出来的桶索引和线程B要插入的记录计算出来的桶索引是一样的,那么当线程B成功插入之后,线程A再次被调度运行时,它依然持有过期的链表头但是它对此一无所知,以至于它认为它应该这样做,如此一来就覆盖了线程B插入的记录,这样线程B插入的记录就凭空消失了,造成了数据不一致的行为。
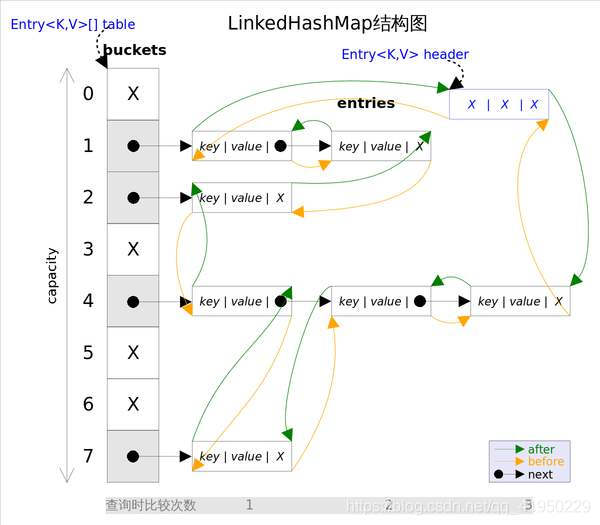
2.LinkedHashMap
LinkedHashMap是HashMap的一个子类,保存了记录的插入顺序,在用Iterator遍历LinkedHashMap时,先得到的记录肯定是先插入的,也可以在构造时带参数,按照访问次序排序。看名字也可以猜到,LinkedHashMap就是在HashMap的基础上加了一个链表来保存记录的插入顺序。结构图如下:
3.TreeMap
TreeMap实现SortedMap接口,能够把它保存的记录根据键排序,默认是按键值的升序排序,也可以指定排序的比较器,当用Iterator遍历TreeMap时,得到的记录是排过序的。如果使用排序的映射,建议使用TreeMap。在使用TreeMap时,key必须实现Comparable接口或者在构造TreeMap传入自定义的Comparator,否则会在运行时抛出java.lang.ClassCastException类型的异常
这里顺便提一下Comparable与Comparator的简单区别:
- comparable是java.lang包下的一个接口,使用compareTo(Object obj)方法来进行排序的。
- comparator是java.util包下的一个接口,使用compare(Object obj1,Object obj2)方法来进行排序的。
线程安全类
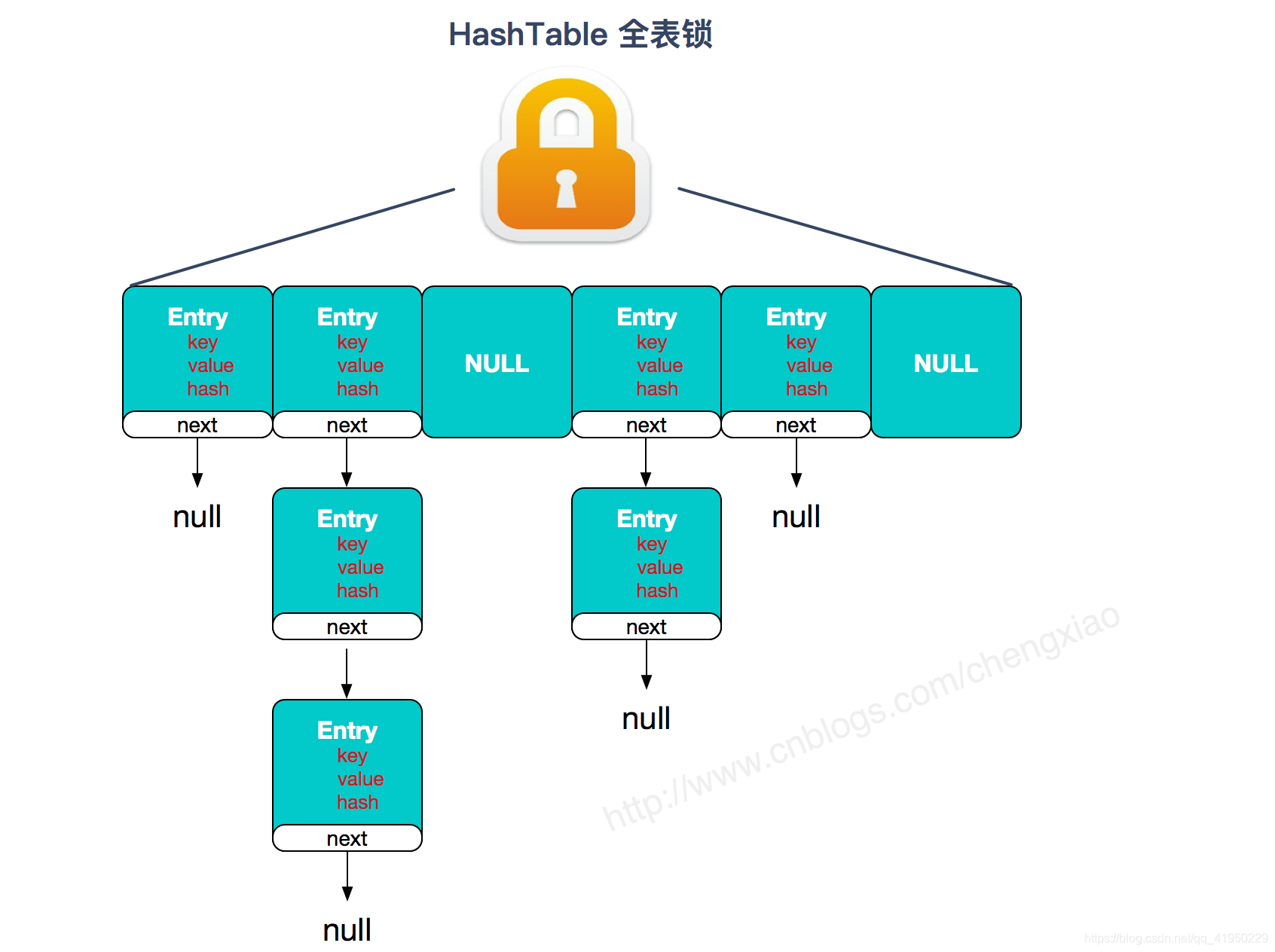
1.HashTable
HashTable和HashMap的实现原理几乎一样,差别无非是1.HashTable不允许key和value为null;2.HashTable是线程安全的。但是HashTable线程安全的策略实现代价却太大了,简单粗暴,get/put所有相关操作都是synchronized的,这相当于给整个哈希表加了一把大锁,多线程访问时候,只要有一个线程访问或操作该对象,那其他线程只能阻塞,相当于将所有的操作串行化,在竞争激烈的并发场景中性能就会非常差。Hashtable不建议在新代码中使用,不需要线程安全的场合可以用HashMap替换,需要线程安全的场合可以用ConcurrentHashMap替换。数据结构如下图:
2.ConcurrentHashMap
ConcurrentHashMap是Java并发包中提供的一个线程安全且高效的HashMap实现
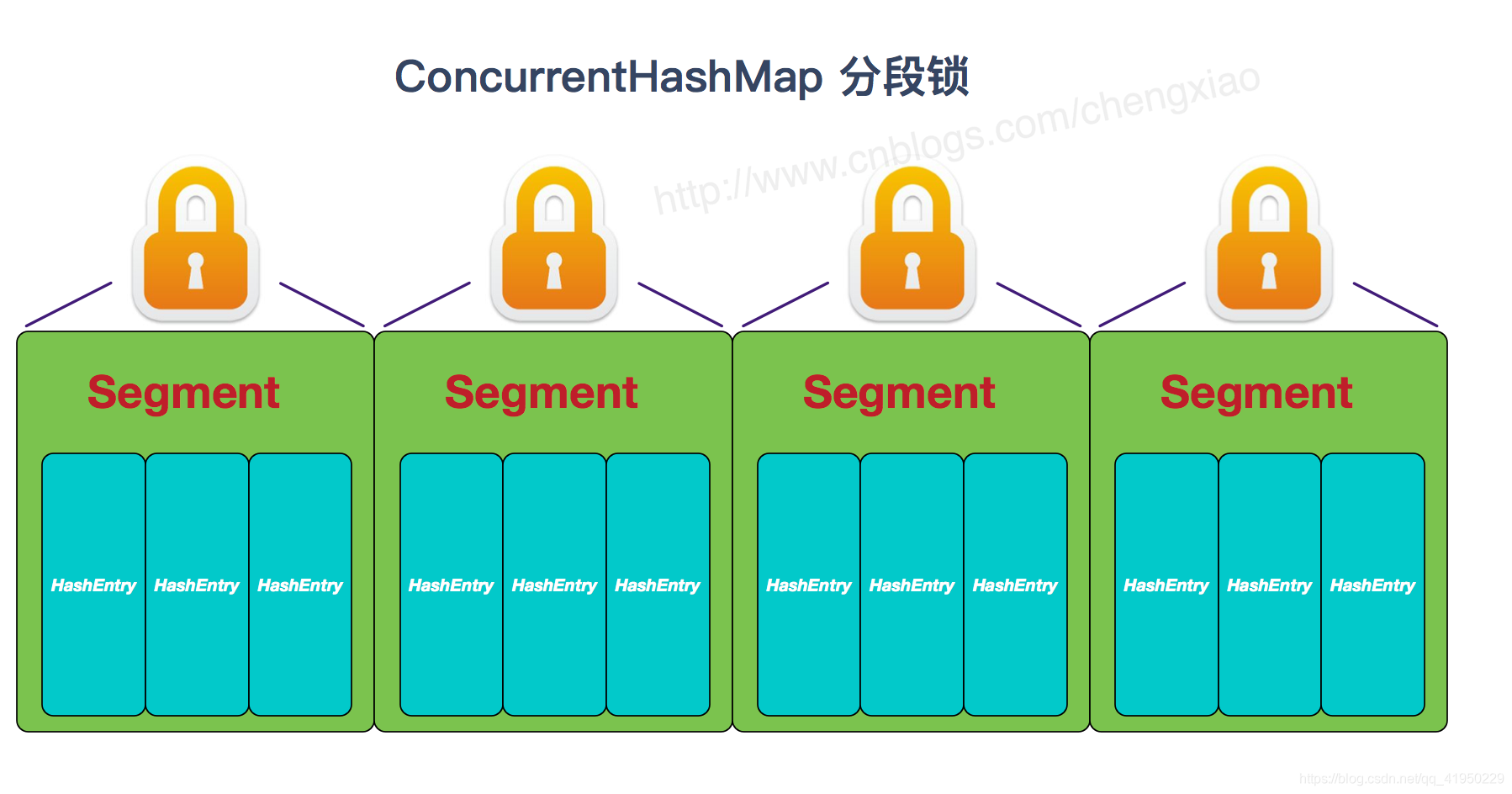
1.分段锁机制
概念由来:上面我们已经说了HashTable线程安全的策略实现代价太大了,它将get/put所有相关操作都是使用synchronized修饰的,这相当于给整个哈希表加了一把大锁,多线程访问时候,只要有一个线程访问或操作该对象,那其他线程只能阻塞,相当于将所有的操作串行化,在竞争激烈的并发场景中性能就会非常差。所以在jdk1.5~1.7版本提出了分段机制概念。
原理:分段锁对整个桶数组进行了分割分段(Segment),每一把锁只锁容器其中一部分数据,多线程访问容器里不同数据段的数据,就不会存在锁竞争,提高并发访问率。结构图如下:
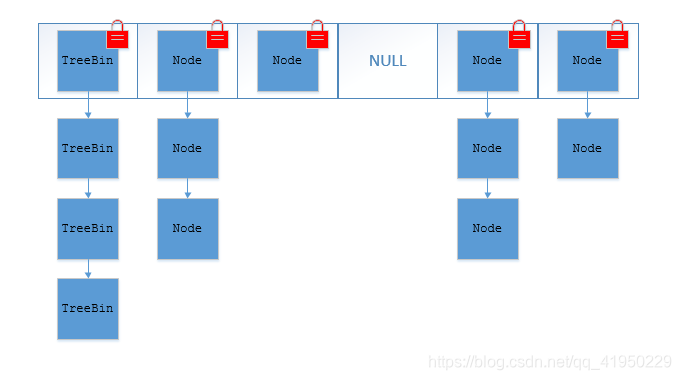
2.jdk1.8版本(现在所用的实现方式)
在jdk1.8版本中,由于采用分段锁时,最大并发数受限于segment个数,有很大的局限性,所以在jdk1.8版本中ConcurrentHashMap取消了Segment分段锁,采用CAS和synchronized来保证并发安全。数据结构跟HashMap1.8的结构类似,数组+链表/红黑二叉树。Java 8在链表长度超过一定阈值(8)时将链表(寻址时间复杂度为O(N))转换为红黑树(寻址时间复杂度为O(log(N)))synchronized只锁定当前链表或红黑二叉树的首节点,这样只要hash不冲突,就不会产生并发,性能得到了很大的提升。
JDK1.8的ConcurrentHashMap(TreeBin: 红黑二叉树节点 Node: 链表节点):
参考
https://www.jianshu.com/p/e2f75c8cce01
https://snailclimb.top/JavaGuide/#/java/Multithread


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









