









Emwin中的Progbar控件的实时刷新显示
问题如下:当STM32的外部数据返回到emwin里面处理显示的时候,需要花很久时间才刷新一次,emwin里的Progbar控件进度条,之前不跑系统的时候是可以1%-2%-3%…-100%,一个一个百分比的变化的,加了系统之后,返回的数据用串口和它显示对比,发现大概过了8%才变化一次,也就是第一次开机刷新时显示0%,等n久后才由0%-8%,8%-16%(0-100%变化分别由变量0-100变化,也就是变量的值对应着进度条的值)但是这个过程并没有实时显示出来,后来去查了一次,应该是任务调度的问题,我设置的emwin的优先级和外部运行的程序的优先级一样,
都是5级优先级
//EMWINDEMO任务
//设置任务优先级
#define EMWINDEMO_TASK_PRIO 5
//任务堆栈大小
#define EMWINDEMO_STK_SIZE 2048
//任务控制块
OS_TCB EmwindemoTaskTCB;
//任务堆栈
CPU_STK EMWINDEMO_TASK_STK[EMWINDEMO_STK_SIZE];
//emwindemo_task任务
void emwindemo_task(void *p_arg);
//L298n电机任务
//设置任务优先级
#define motor_TASK_PRIO 5
//任务堆栈大小
#define motor_STK_SIZE 160
//任务控制块
OS_TCB motorTaskTCB;
//任务堆栈
CPU_STK motor_TASK_STK[motor_STK_SIZE];
//led0任务
void motor_task(void *p_arg);
也就是说,这两个任务是一直完成然后切换的,(当然过程中还有更高优先级的触摸任务,优先级4)
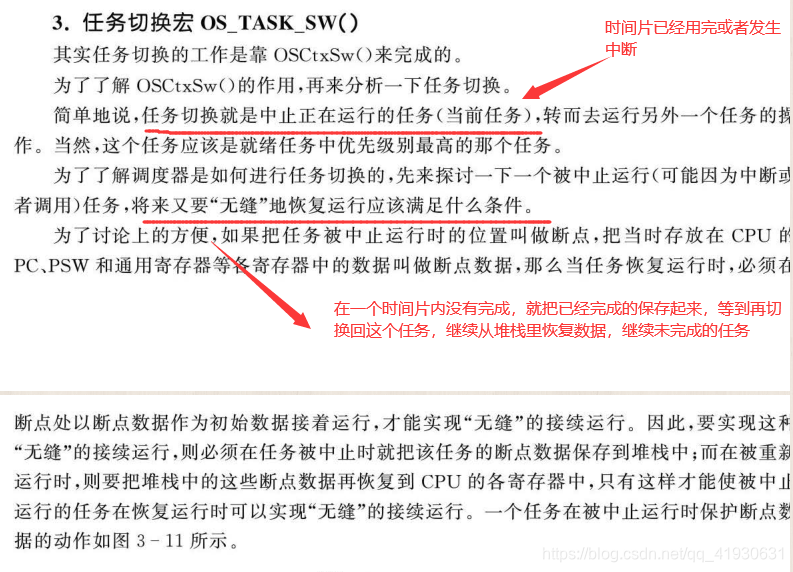
着重理解任务中止
大概意思就是说,如果两个任务一直有切换的话,那就意味着两个任务都有被正常运行,等下次任务恢复后又继续从上一次没有完成的地方开始继续完成任务,结合以上的,我大概就猜到了应该是emwin的任务的时间片过短了,导致没有运行到更新Progbar的控件的代码那句,循环了几次切换任务后,才真正完成了一个emwin的任务,然后去查了仔细了解了一下系统的时间片轮调度,后面才知道,默认情况下,每一个任务的时间片轮是系统默认的也就是1个系统节拍×5ms(这里的5ms可以修改),
这里已经使能了时间片轮调度功能
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
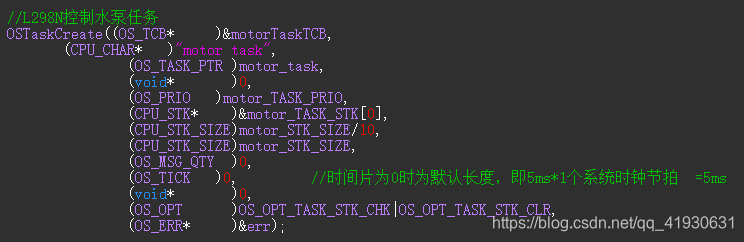
后来我就把两个两个任务的时间片轮都调大,L298n的改成120个时间片轮,也就是600ms,
//L298N控制水泵任务
OSTaskCreate((OS_TCB* )&motorTaskTCB,
(CPU_CHAR* )"motor task",
(OS_TASK_PTR )motor_task,
(void* )0,
(OS_PRIO )motor_TASK_PRIO,
(CPU_STK* )&motor_TASK_STK[0],
(CPU_STK_SIZE)motor_STK_SIZE/10,
(CPU_STK_SIZE)motor_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )120, //时间片为0时为默认长度,即5ms*1个系统时钟节拍 =5ms
(void* )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR* )&err);
L298n的任务块
void motor_task(void *p_arg)
{
OS_ERR err;
while(1)
{
// if(HW==0) //如果检测到有瓶子 ,则红外灯亮,返回0,
// {
if (/*Bottle_Flag==1&&*/L<capacity1-1)
{ buhuo();
motor_start(); //水泵全速启动
}else if(L>=capacity1-1) //如果检测到流量大于等于299ml,则水泵停止工作,转盘启动
{ //OSTaskTimeQuantaSet();
Bottle=Bottle+1;
motor_stop(); //水泵停止
Locate_Rle(1600,1000,CW); //步进电机旋转90度
printf("标志位为%d\r\n",Bottle_Flag); //打印输出
printf("瓶子:%d 瓶\r\n",Bottle); //打印瓶子
Freq=0; //上一次的工作已完成,把捕捉到的脉冲计数清零
L=0; //上一次的工作已完成,把流量计数清零
Bottle_Flag=0; //标志位清零,表示清除上一次瓶子的状态
delay_ms(500);
} OSTimeDlyHMSM(0,0,0,5,OS_OPT_TIME_PERIODIC,&err);//延时1ms
}
}
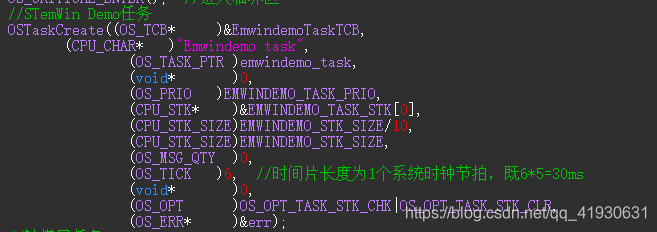
emwin的时间片轮改成2个系统时钟节拍,10ms
//STemWin Demo任务
OSTaskCreate((OS_TCB* )&EmwindemoTaskTCB,
(CPU_CHAR* )"Emwindemo task",
(OS_TASK_PTR )emwindemo_task,
(void* )0,
(OS_PRIO )EMWINDEMO_TASK_PRIO,
(CPU_STK* )&EMWINDEMO_TASK_STK[0],
(CPU_STK_SIZE)EMWINDEMO_STK_SIZE/10,
(CPU_STK_SIZE)EMWINDEMO_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )2, //时间片长度为1个系统时钟节拍,既2*5=10ms
(void* )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR* )&err);
emwin的任务块
//EMWINDEMO任务
void emwindemo_task(void *p_arg)
{
OS_ERR err;
GUI_CURSOR_Show(); //显示鼠标
MainTask();
while(Run_Flag)
{
OSTimeDlyHMSM(0,0,0,1,OS_OPT_TIME_PERIODIC,&err);//延时5ms
}
}
然后现在Progbar的控件实时刷新的问题没有解决,还多了一个emwin切换界面反应很慢的问题,后来发现,我把L298n的时间片轮设置过大了,导致长时间停留在L298n,当你触摸界面的时候,要等l298n的任务完成了才能刷新,然后后面经过测试。
把L298n的时间片轮设置为默认,即5ms
然后经过测试得,emwin一个完整的任务刷新大概需要30ms,也就是6个时间片轮。
到这里,这个Progbar控件的问题就基本解决了。已经可以做到单片机外部返回数据,然后UI界面实时刷新,差不多1000ms刷新一次这样
我的UcosⅢ刚学几天,这个是个人见解,大佬勿喷!嘴下留情!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









