




 本文探讨了layers_utils.py中的ReflectionPadding2D和perceptual_loss函数,介绍了如何在模型中应用反射填充和计算损失。generator_model与discriminator_model展示了卷积网络在生成器和判别器中的应用,涉及ResNet块和LeakyReLU。重点涵盖了VGG16模型的使用和losses.py中的L1、感知损失和Wasserstein损失。同时,训练流程中包含了权重保存和图像去模糊技术的实现。
本文探讨了layers_utils.py中的ReflectionPadding2D和perceptual_loss函数,介绍了如何在模型中应用反射填充和计算损失。generator_model与discriminator_model展示了卷积网络在生成器和判别器中的应用,涉及ResNet块和LeakyReLU。重点涵盖了VGG16模型的使用和losses.py中的L1、感知损失和Wasserstein损失。同时,训练流程中包含了权重保存和图像去模糊技术的实现。
一.layers_utils.py
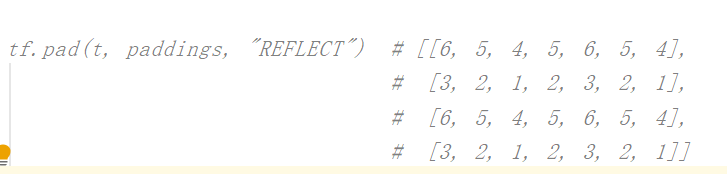
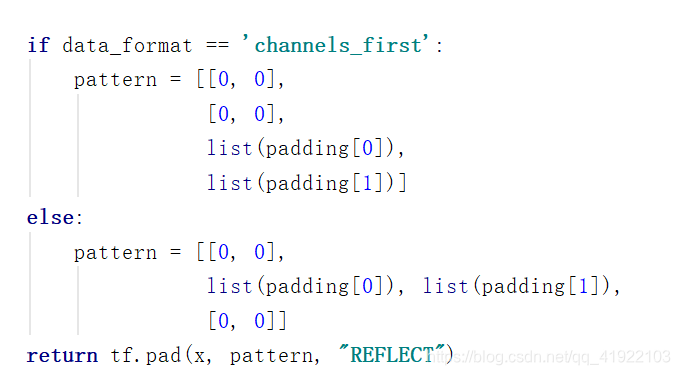
1.ReflectionPadding2D():该层可以添加行、列或零在图像张量的顶部、底部、左侧和右侧。整数:相同的对称填充应用于宽度和高度。两个整数的元组:解释为两个不同的高度和宽度的对称填充值。数据形式为字符串,默认是 channels_last 。输入四维张量2.spatial_reflection_2d_padding(x, padding=((1, 1), (1, 1)), data_format=None):填充四维向量的第二第三维度,返回tf张量 tf.pad(x, pattern, "REFLECT")。padding整数张量【秩,2】。如果模型是reflect,填充[D,0],[D,1]
。其中加判断数据格式是否是data-format的语句,first\last\none。
assert len() 断言函数
assert语句用来声明某个条件是真的,当assert语句失败的时候,会引发一AssertionError.
3. class ReflectionPadding2D(Layer)
(1)python 中可变参数的两种形式,并且 *args(元组)必须放在 **kwargs( keyword arguments 的缩写) 的前面,因为位置参数在关键字参数的前面. **kwargs将一个可变的关键字参数的字典传给函数实参,同样参数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7440
7440




 到【灌水乐园】发言
到【灌水乐园】发言









