







 本文介绍了Ziegler-Nichols(Z-N)法用于PID控制器参数整定,强调了其在工程计算中的实用性。通过Z-N调谐表确定临界增益和周期,结合Matlab的`minreal`和`margin`函数进行系统分析。这种方法适用于初步估算PID参数,实际应用中可能需要进一步细化调整。
本文介绍了Ziegler-Nichols(Z-N)法用于PID控制器参数整定,强调了其在工程计算中的实用性。通过Z-N调谐表确定临界增益和周期,结合Matlab的`minreal`和`margin`函数进行系统分析。这种方法适用于初步估算PID参数,实际应用中可能需要进一步细化调整。
简介
Ziegler—Nichols(Z—N)的PID整定方法在工程快速 计算方面具有很大的影响力,它的频率响应方法是通 过PID控制器的临界振荡试验获得被控对象重要的临界频率响应特性,并根据经验给出相应的PID参数经 验公式。Z—N整定方法的优点在于在计算过程中不需要另外建立任何对象控制模型,简单实用,所以目前该 方法在自动控制领域中仍被广泛采用。
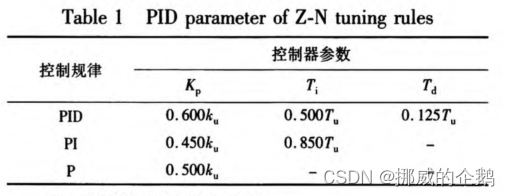
Z-N调谐表
齐格勒-尼科尔斯规则是第一个提供一个的实用方法来调整PID控制器。根据该规则,一个PID控制器的调谐方法是首先将其设置为纯P模式,然后调整增益,使控制系统处于连续振荡状态。相应的增益被称为终极增益(Ku),振荡周期为振荡周期被称为终极周期(Pu)。然后,PID控制器的参数由Ku和Pu决定,使用的Ziegler-Nichols调谐表
代码原理
确定最终增益和周期Ziegler-Nichols调谐方法的关键步骤是确定的极限增益和周期。然而,通过实验来确定最终的增益和周期是很费时间的。由于连续振荡模式与临界稳定条件相对应,对于线性系统。这样的条件可以很容易地通过稳定性余量来确定。 其他工具,如Routh准则和Evans根基位置,不能直接处理延时问题。 让系统在分频器频率Wcg时有增益余量Gm。这相当于与一个单位增益控制器连接。因此
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1862
1862

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









