







 本文详述了一次使用GCPMarker软件进行无人机摄影测量自动化刺点的实验过程。通过大疆M300RTK与P1相机在西南某村庄获取高分辨率影像,利用14个像控点进行空三计算。软件在659秒内完成刺点,结果显示所有像控点重投影误差在1像素内,证明了GCPMarker的准确性和实用性,有效减少了内业工作量。
本文详述了一次使用GCPMarker软件进行无人机摄影测量自动化刺点的实验过程。通过大疆M300RTK与P1相机在西南某村庄获取高分辨率影像,利用14个像控点进行空三计算。软件在659秒内完成刺点,结果显示所有像控点重投影误差在1像素内,证明了GCPMarker的准确性和实用性,有效减少了内业工作量。
上一篇文章简要介绍了我们开发的无人机摄影测量自动化刺点软件"GCP Marker"的各项功能及工作流程。这篇文章使用真实的无人机影像对其进行测试。
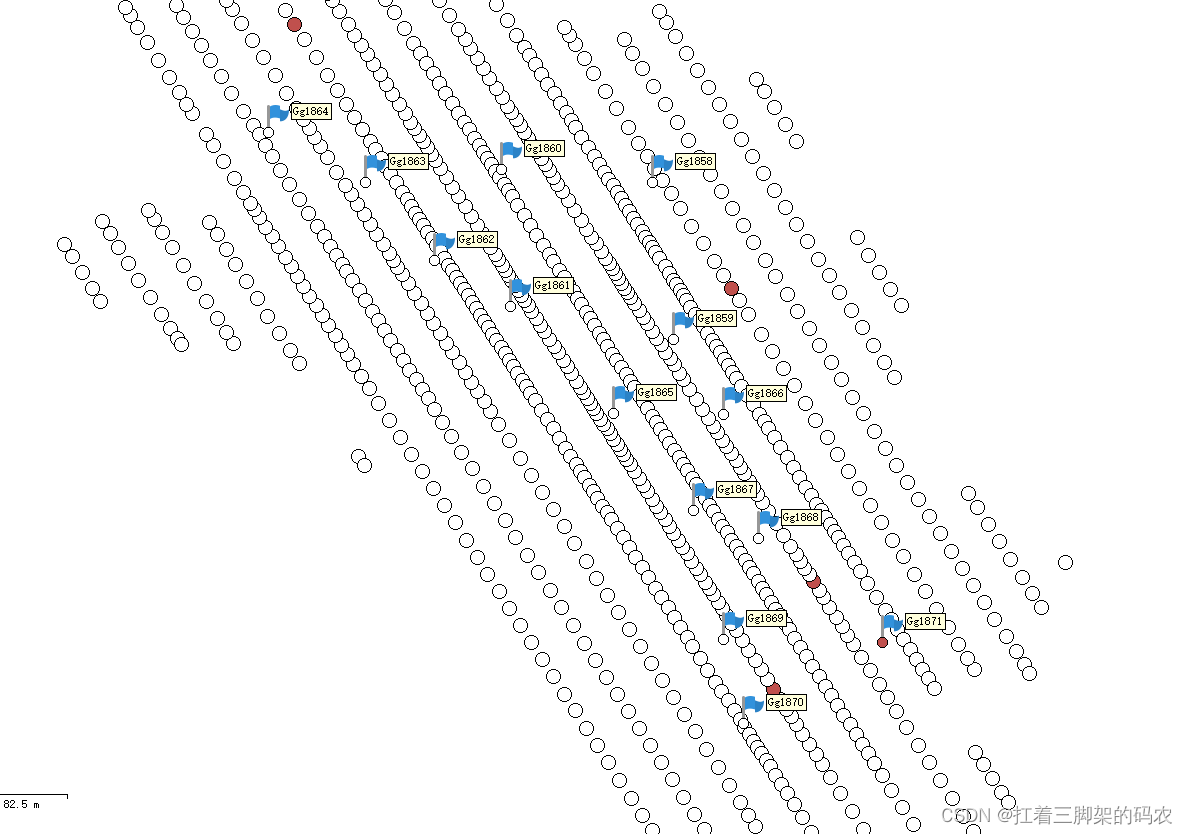
本次实验以西南地区某村庄为测量对象,使用大疆M300 RTK搭载P1相机进行倾斜摄影测量,航高为130m,此时地面分辨率为1.75cm/pixel,共计飞行32分钟,拍摄影像859张。在无人机起飞前使用红色油漆绘制14个L型像控点,均匀分布在测区内。其航线规划及像控点分布如图所示。
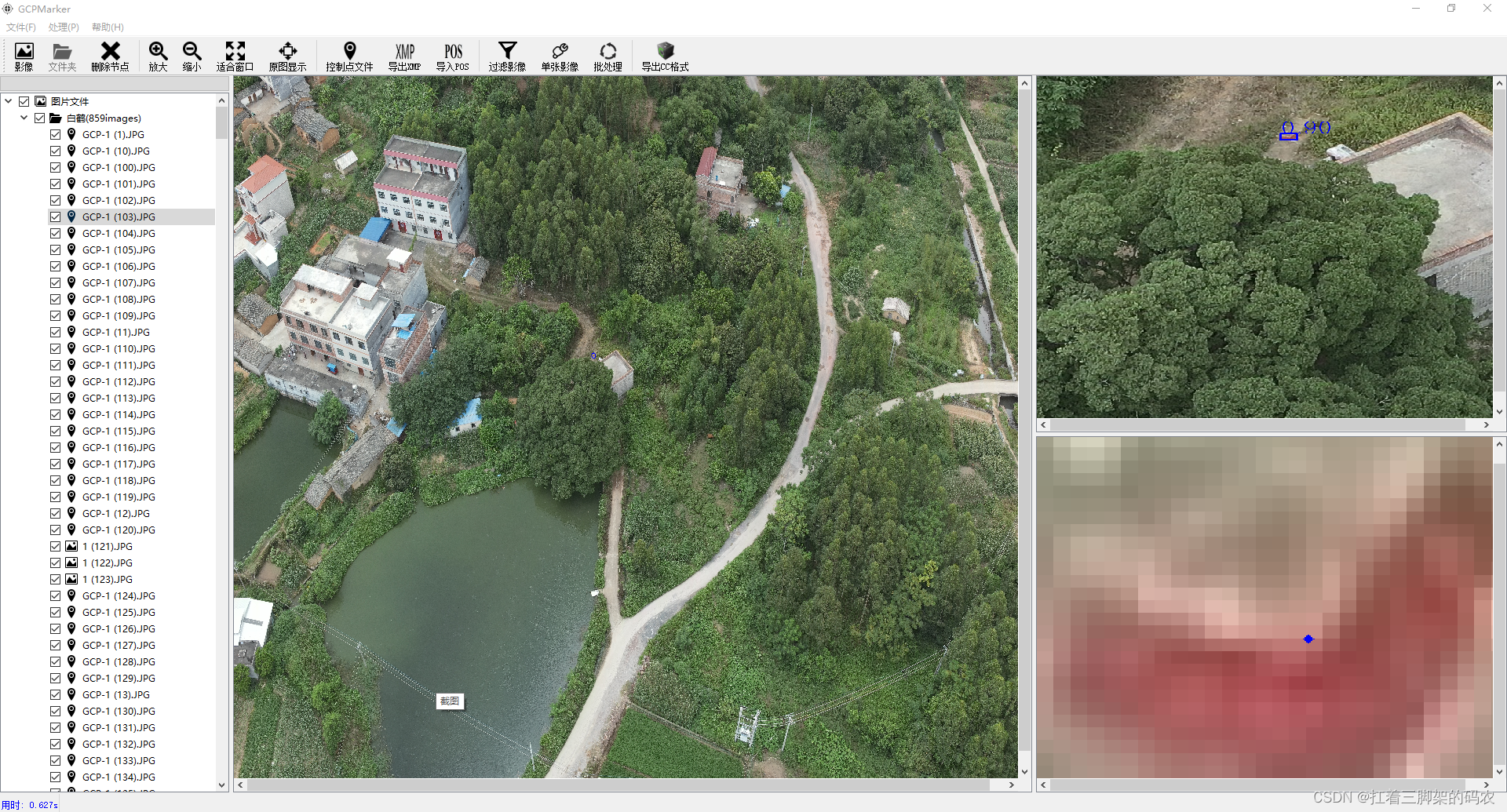
将无人机影像及像控点坐标文件导入GCP Marker软件后进行自动刺点,共耗时659秒即可完成所有刺点,并生成相应的刺点文件。GCP Marker软件的自动刺点效果如图所示,其中右下角视图中的蓝色小点为软件自动刺点的结果。
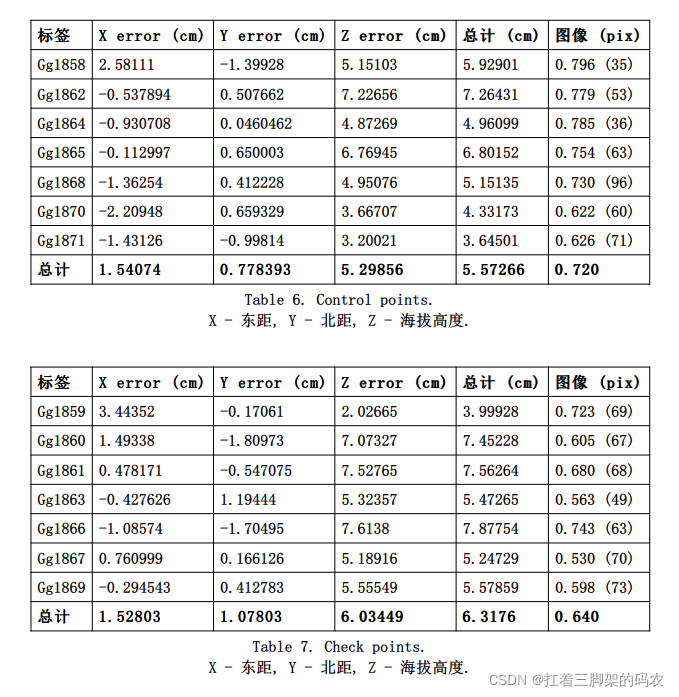
将刺点文件导入Metashape软件后即可完成自动刺点。将像控点中的7个作为控制点,另外7个作为检查点,然后进行高精度空三计算后得到精度报告如下图所示:
将刺点文件导入Pix4D软件后进行空三处理,得到空三精度报告如图所示:
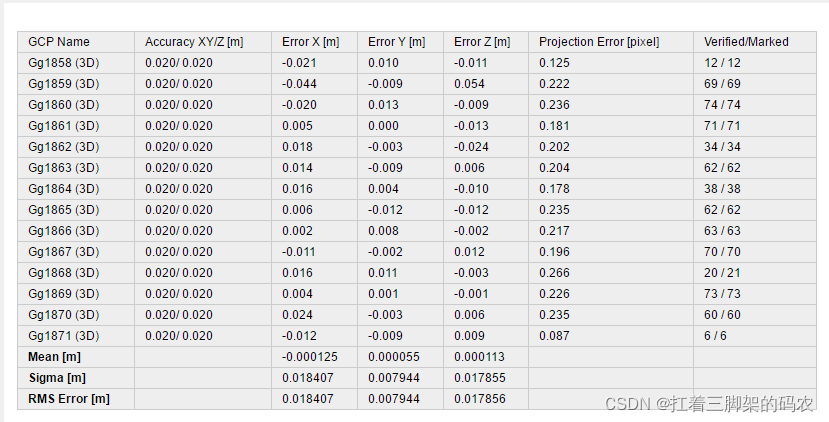
将刺点文件导入ContextCapture中后进行空三计算,得到空三精度报告如图所示:
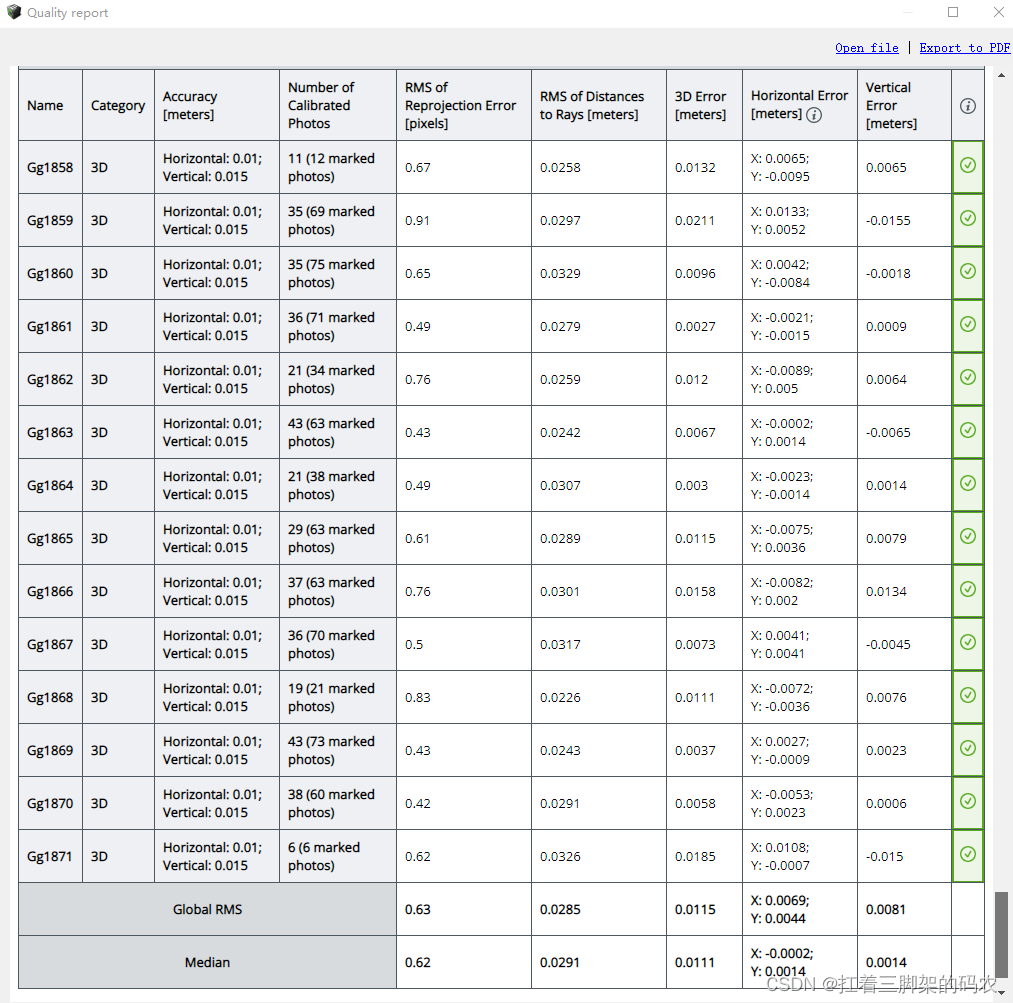
可见所有像控点的重投影误差均在1个像素内,由此证明GCP Marker软件的刺点准确性。另外,由于该软件避免了人工刺点,能够极大地减少航测内业工作量,将内业人员从枯燥重复的刺点工作中解放出来,具有很强的实用性。


















 2282
2282

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









