






【转载】STK 特定问题建模(三)GPS干扰仿真(第二部分)
转载来源:https://blog.youkuaiyun.com/weixin_42695504/article/details/134916782?spm=1001.2014.3001.5502
简介
本篇对卫星导航中的干扰进行仿真,以GPS卫星为例。查看小型手持GPS干扰器对一架正在飞行的飞机会产生什么影响?
建模将从以下几个部分开展:
1、GPS卫星星座仿真( BIIF / BIIR / BIIRM / BⅢ)
2、GPS卫星发射机设计
3、无人机接收机设计
4、星地链路环境仿真
5、干扰机仿真
6、对干扰前后通信链路信号质量进行评估
第一部分见文章STK 特定问题建模(三)GPS干扰仿真(第一部分),本篇对3、4、5步骤进行进一步仿真
三、无人机接收机设计
(3)创建无人机接收机
本篇接着上篇文章继续进行建模。设置完后的无人机接收机天线如下:
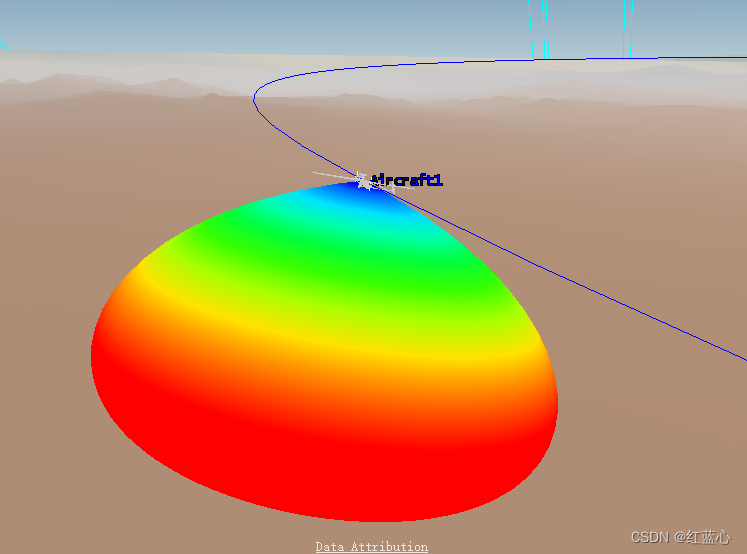
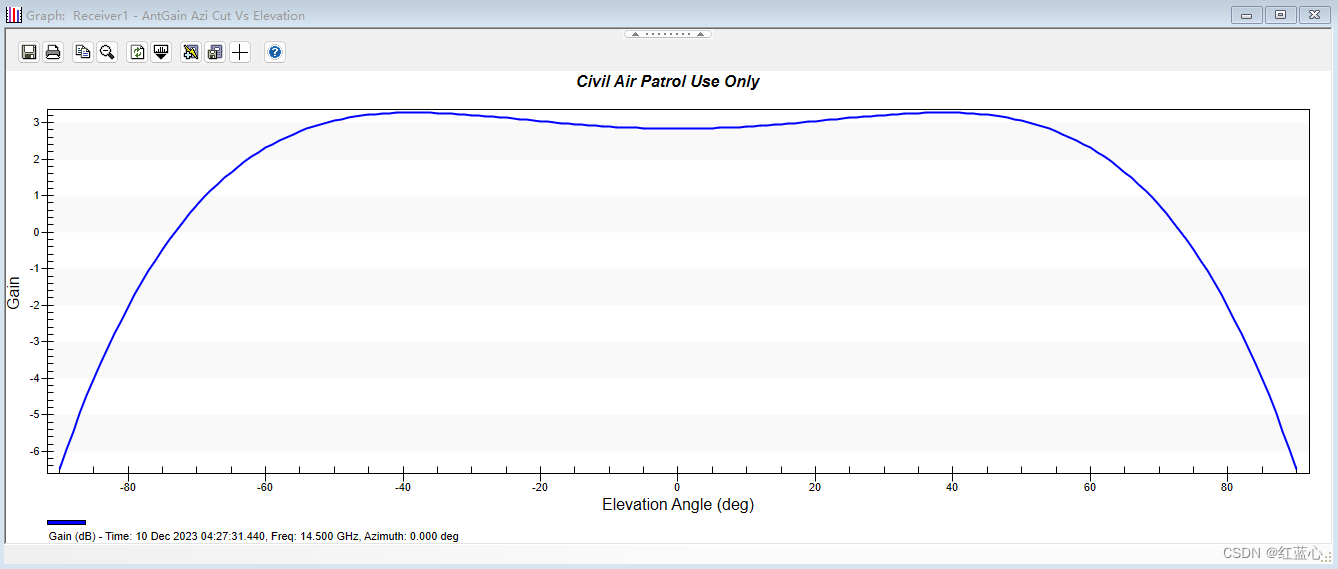
右键接收机,选择Graph&report,查看接收机天线增益随波束角的变化情况:
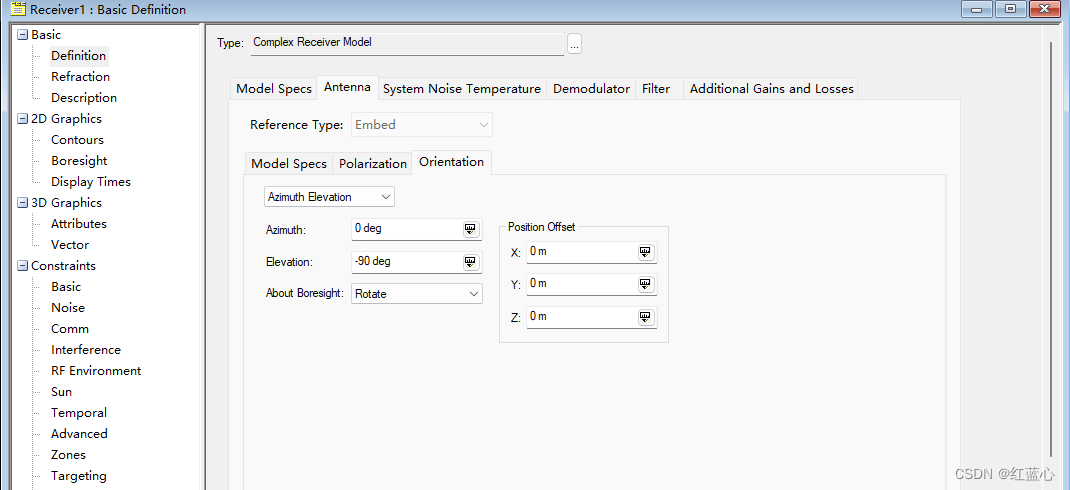
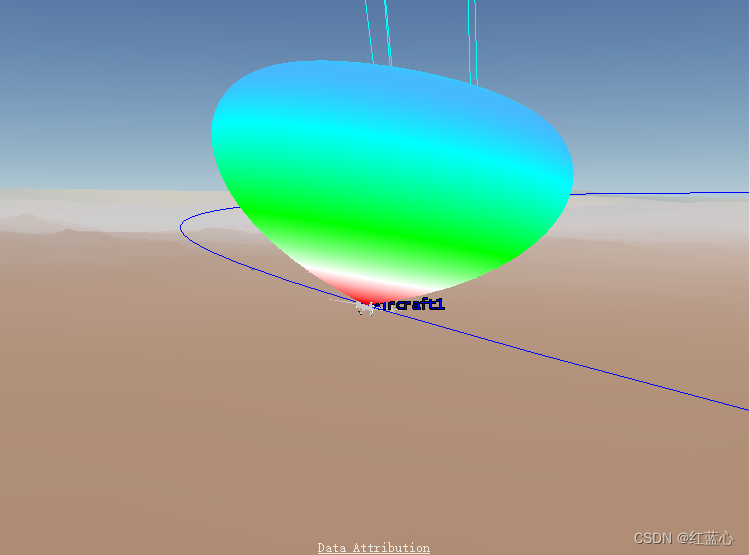
为接收GPS信号,设置天线指向向天。双击打开接收机编辑其属性,在Antenna,Orientation中,设置仰角为-90°:
在3D Graphics中,更改天线颜色。手动设置颜色代表天线增益取值的最大、最小范围(根据接收机天线增益随波束角的变化情况结果):
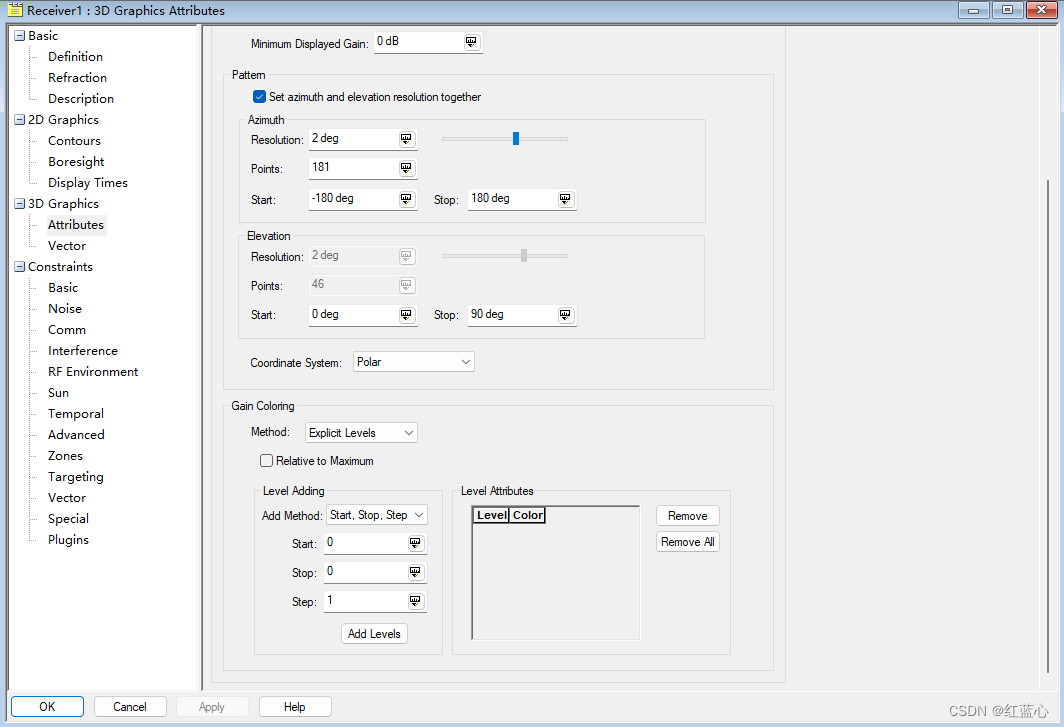
更改后的天线为:
四、星地链路环境仿真
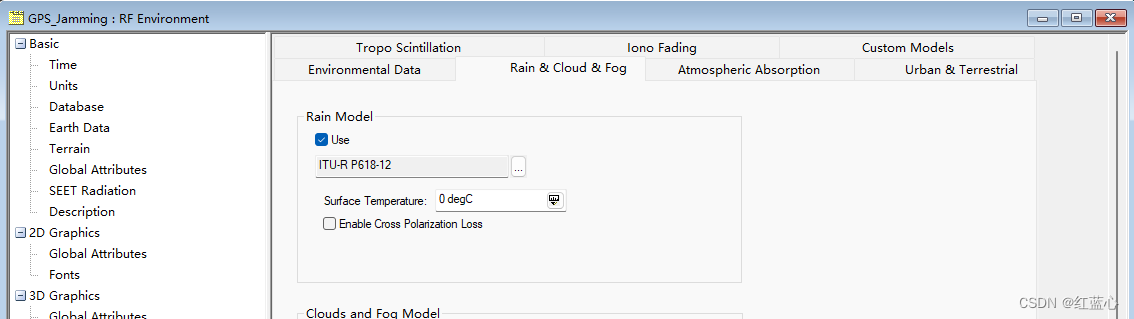
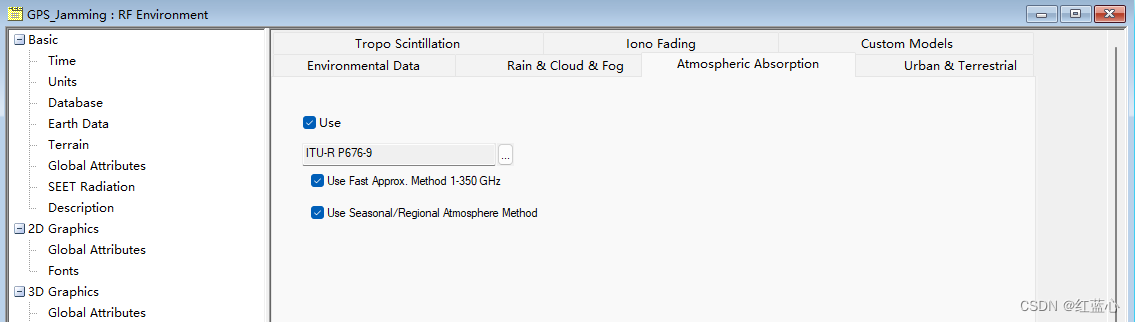
首先右边项目编辑其属性,在RF-environment中,增加对雨、云、大气模型的仿真:
(1)链路预算
对星地链路进行预算。简单的链路预算报告了GPS 信号接收的数值。笨重重点关注链路预算中的载噪比: C/No(dB * Hz)。数值大于 35 表示 GPS 接收效果良好。
右键接收机选择Access,计算与所有卫星发射机的Access:

点击Link Budget,查看与每个卫星链路的载噪声比:
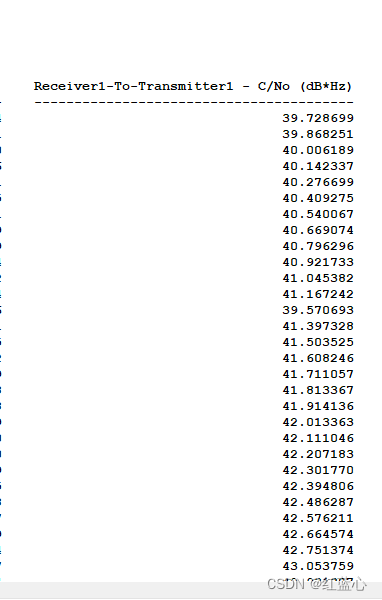
翻阅报告,可以看出,无人机接收载噪比大于35的卫星共有11颗。

五、干扰机设计
(1)创建GPS干扰机
通过Insert,插入Place,编辑其位置为:

可以看到,干扰机位置位于无人机飞行航迹点包围的区域中

(2)设置GPS干扰机发射机
通过Insert插入干扰机的发射机,模型选择为Complex Transmitter Model,频点设置为L1 1.57542GHz,发射EIRP为1 dbW

接着,对发射天线进行设置,结果如下:

对干扰机调制方式进行设置。
GPS发射机的调制使用2.046 MHz的带宽。廉价的干扰机使用更小的带宽。适用窄带均匀分析调制器,对窄带干扰机进行建模。在Modulator中,选择Narrowband Uniform,设置带宽为25KHz

未完,待续
更多仿真内容,可以关注公众号“STK建模”查看




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









