







 博客主要介绍了用于线性二分类的感知器及PLA算法,阐述了PLA算法从假设空间找g的目标和方法,通过举例说明其调整分界面的过程,分析了PLA的终止条件、优缺点,还提出用口袋算法解决PLA在数据有噪声时的停止问题。
博客主要介绍了用于线性二分类的感知器及PLA算法,阐述了PLA算法从假设空间找g的目标和方法,通过举例说明其调整分界面的过程,分析了PLA的终止条件、优缺点,还提出用口袋算法解决PLA在数据有噪声时的停止问题。
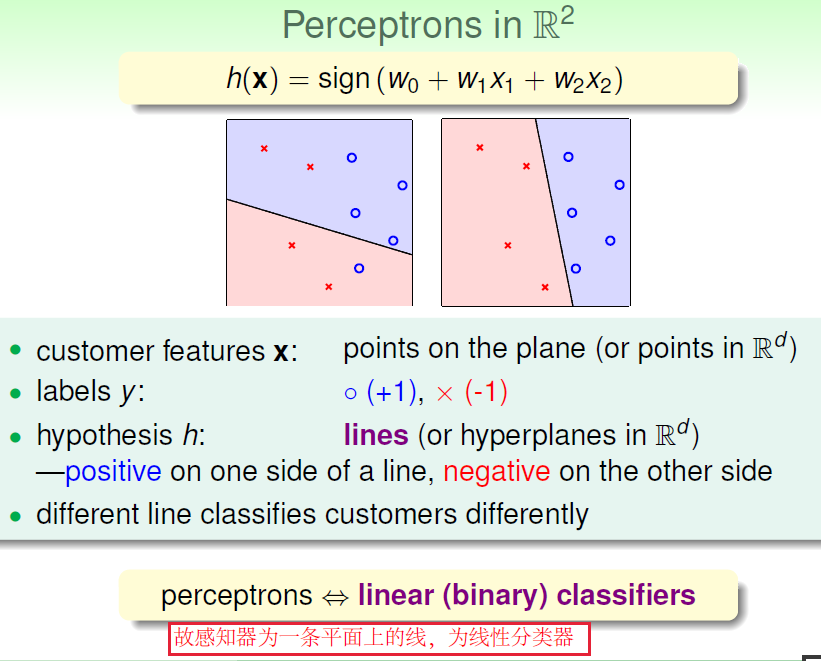
Perception 感知器(用于线性二分类)
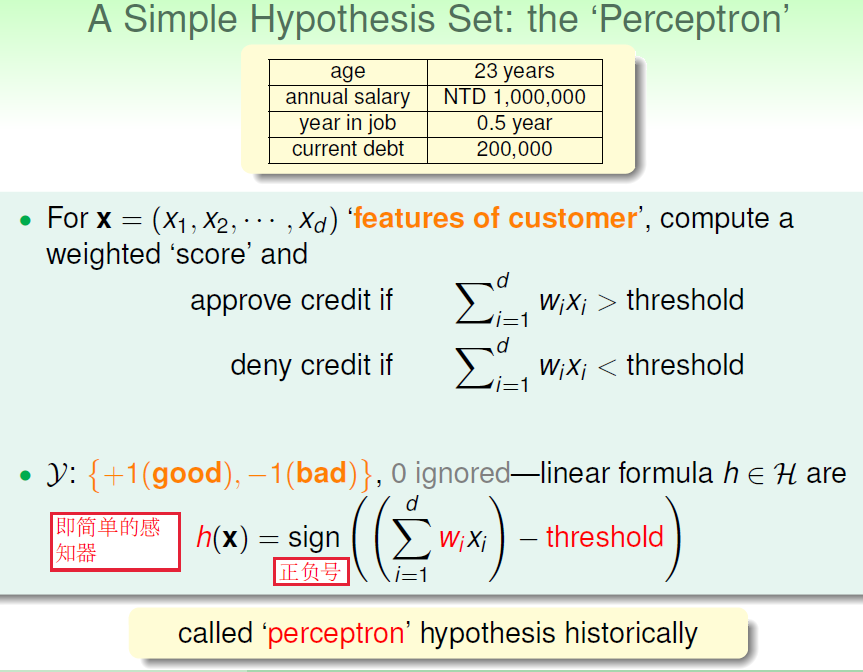
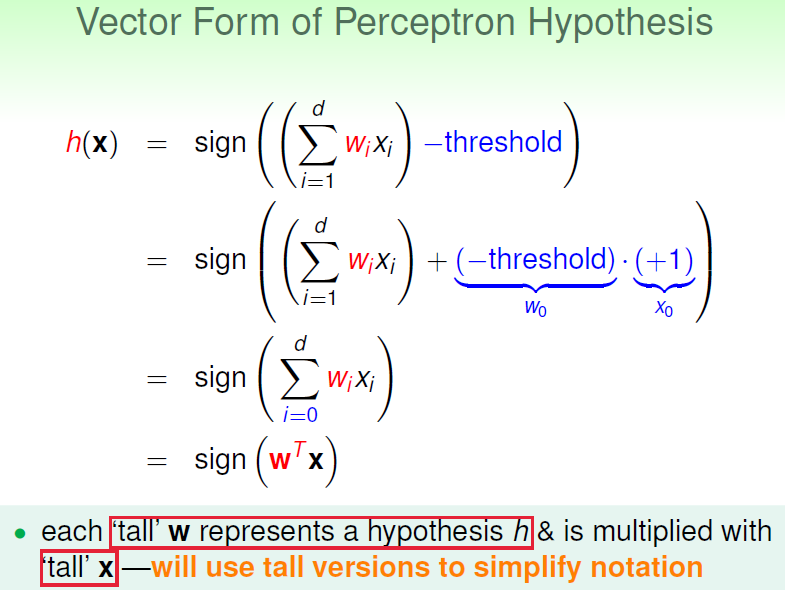
PLA算法 : 怎样从假设空间 HHH 中找到 ggg
1.目标:g 约等于 f,最好的结果,但是f未知此方法不行
2.目标:使得在给定数据上两者预测结果接近
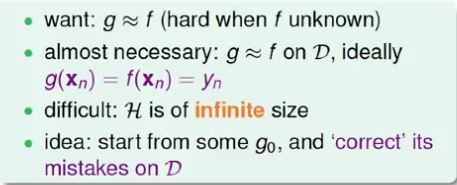
3.感知器优化算法(PLA)
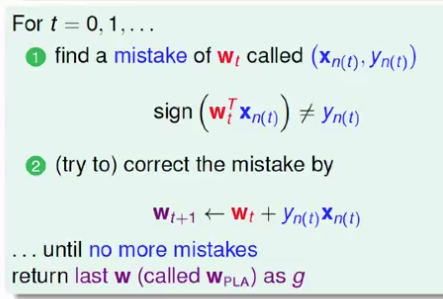
上述公式的理解:
(1)y是正的,出来结果w是负的
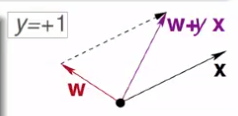
通过w+x,将w拉回来一点(作为新的分界面法向量,此图中黑色x为原分界面法向量)
(2)y是负的,出来结果w是正的
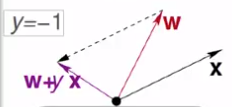
通过w+x,将w拉过去一点
举例:
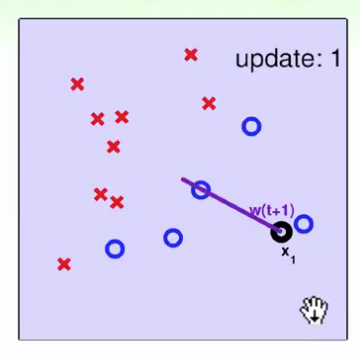
(1)最开始没有线
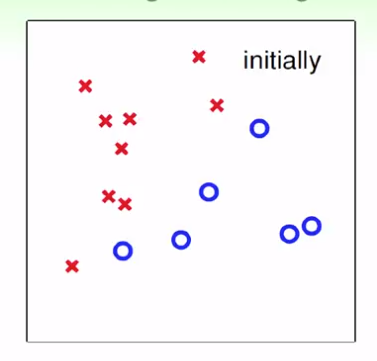
(2)默认每个点都是错的,找到任意一点与原点连线(原点在图中间),而这个点刚好为正(圈为正,叉为负),即为分界面的法向量
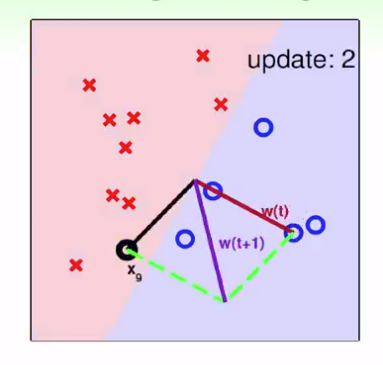
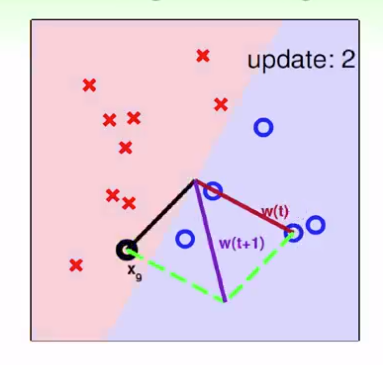
(3)
黑点为分类错误的点,与原法向量相加,产生紫色线,即可以调整分界面,紫色作为新的法向量,如此持续,直到没有分类错误
思考:
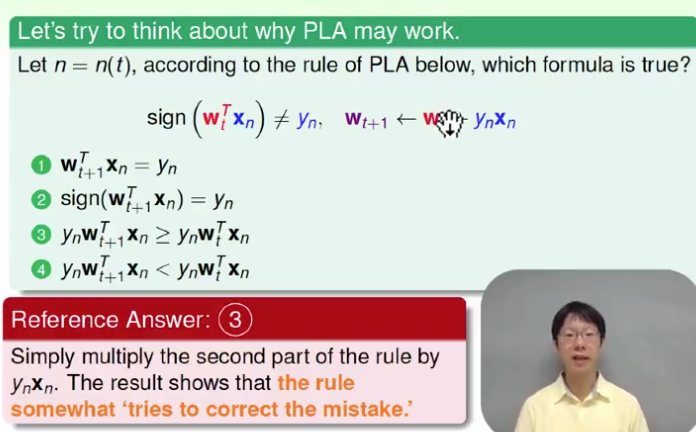
通过一次的调整,可以使得错误的点偏向正确一点点,但不是完全保证一定正确
PLA终止条件
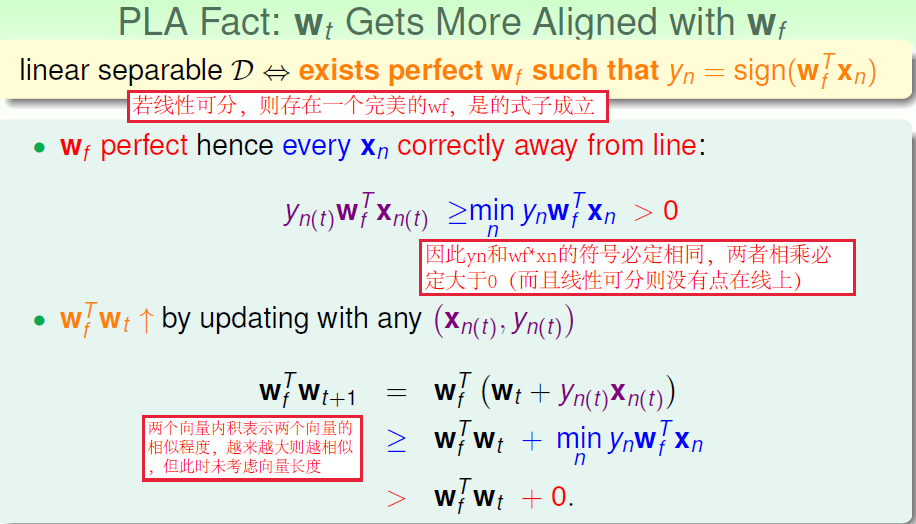
1.PLA保证:数据必须线性可分
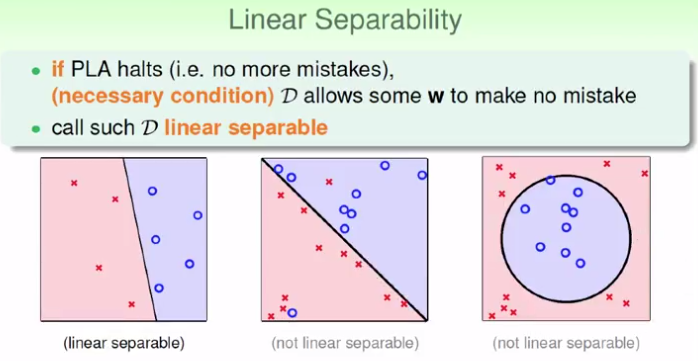
2.PLA条件1:线性可分
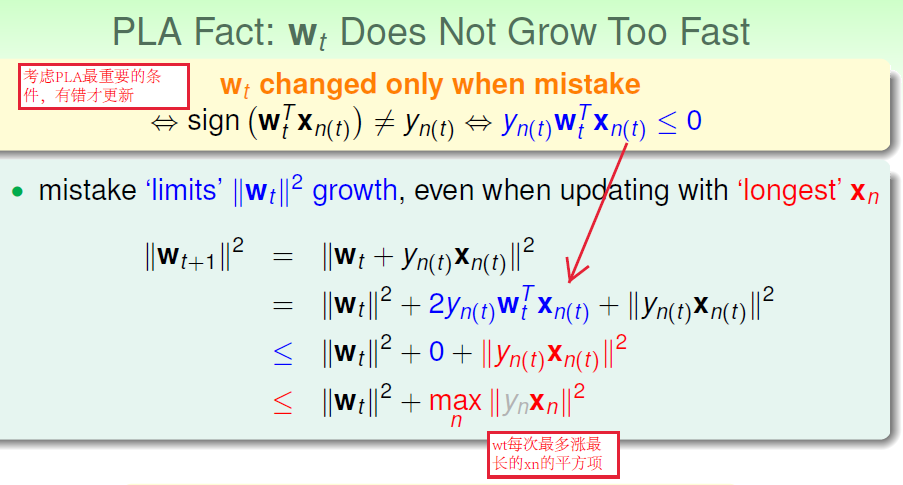
3.PLA条件2:有错才更新
结合条件1和2的结论:令

则由(1)得:
对于第T次更新,
wfT∗wT>wfT∗w0+T∗ρ∗∣∣wf∣∣=T∗ρ∗∣∣wf∣∣w_f^T*w_T > w_f^T*w_0+T*\rho*||w_f|| = T*\rho*||w_f||wfT∗wT>wfT∗w0+T∗ρ∗∣∣wf∣∣=T∗ρ∗∣∣wf∣∣
(因为w0=0w_0=0w0=0)
由(2)得:
对于第T次更新,
wfT∗wT>wfT∗w0+T∗ρ∗∣∣wf∣∣=T∗ρ∗∣∣wf∣∣w_f^T*w_T > w_f^T*w_0+T*\rho*||w_f|| = T*\rho*||w_f||wfT∗wT>wfT∗w0+T∗ρ∗∣∣wf∣∣=T∗ρ∗∣∣wf∣∣
从而(1)结果除以(2):
wfT∗wT∣∣wT∣∣)>T∗ρ∗∣∣wf∣∣T∗R\frac{w_f^T*w_T}{||w_T||})> \frac{T*\rho*||w_f||}{\sqrt{T}*R}∣∣wT∣∣wfT∗wT)>T∗RT∗ρ∗∣∣wf∣∣
wfT∗wT∣∣wT∣∣∗∣∣wf∣∣>TρR\frac{w_f^T*w_T}{||w_T||*||w_f||}> \sqrt{T}\frac{\rho}{R}∣∣wT∣∣∗∣∣wf∣∣wfT∗wT>TRρ
而wfT∗wT∣∣wT∣∣∗∣∣wf∣∣\frac{w_f^T*w_T}{||w_T||*||w_f||}∣∣wT∣∣∗∣∣wf∣∣wfT∗wT 即两个向量的相似度,最大不超过1,故
1>TρR1 > \sqrt{T}\frac{\rho}{R}1>TRρ,最大更新次数 T 不超过 R2ρ2\frac{R^2} {\rho^2}ρ2R2
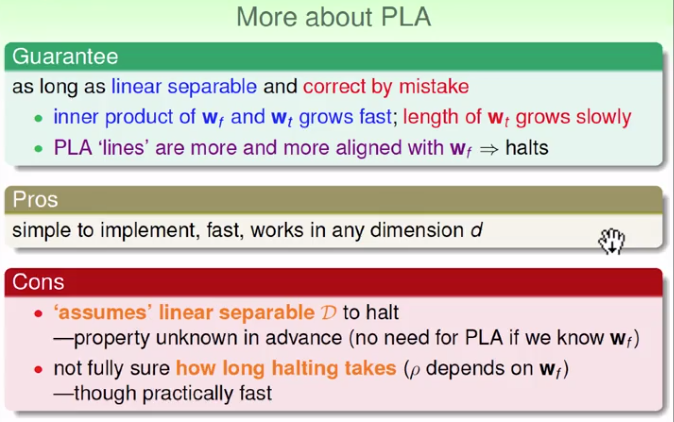
PLA优缺点分析
(1)优点:比较容易去实现
(2)缺点:
1.假定数据线性可分,但事实上我们不知道数据的分布
2.不确定多久才会终止,因为上述条件中的 ρ\rhoρ 与 wfw_fwf 有关,但 wfw_fwf 未知
解决上述缺点
即使数据线性可分,当数据有噪声时PLA应该如何停止?
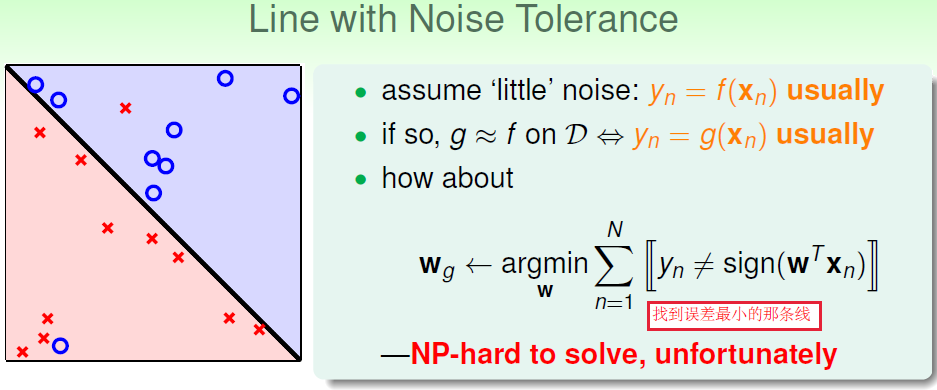
解决方法:
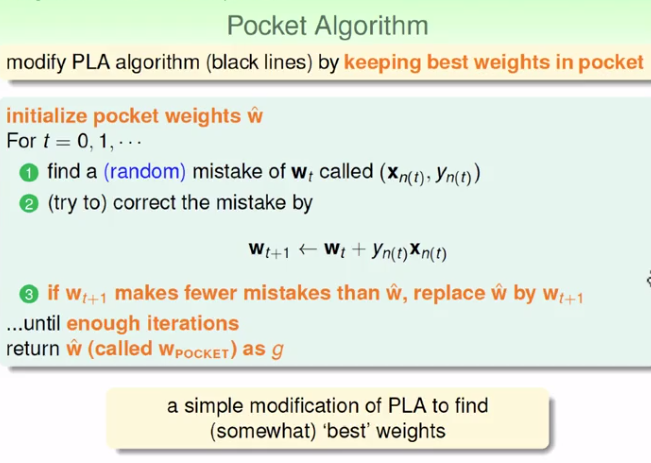
1.口袋算法(贪心算法,PLA的一个变形)
两者比较:
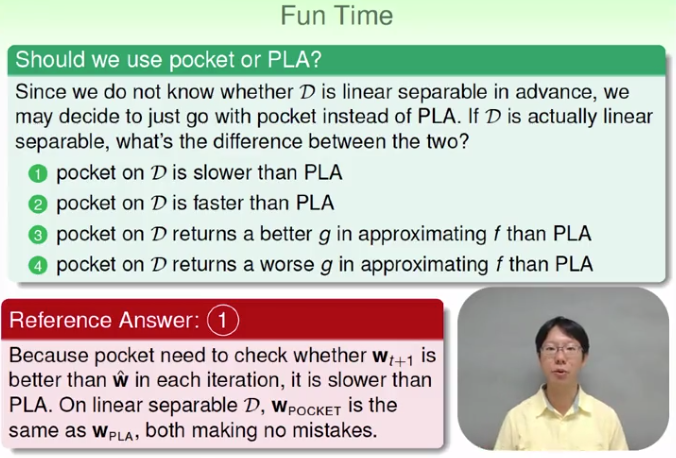
当线性可分时,口袋算法对于每条线,需要找出所有错误分类的点,而PLA只需要找到一个即可


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









