







talk
丢弃负样本~,隐身。 是否是共享encoder,损失中是否采用单位矩阵 来防止 平凡解
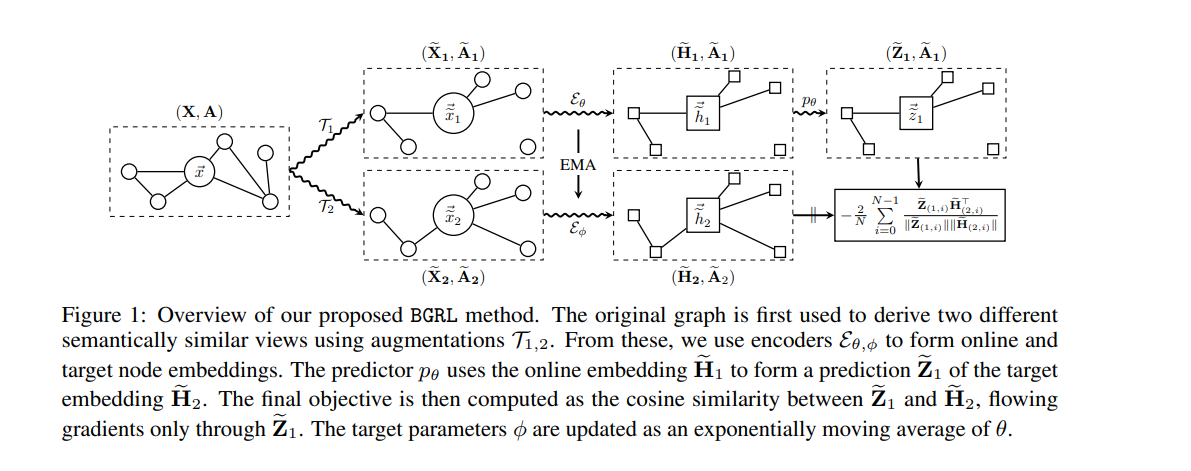
1.BGRL
BYOL在图上的应用, 主要流程和 MOCOv2, simCLR2 一样。 采用动量编码器。 损失函数就是byol的损失,不采用infonce这类需要负样本的对比 。 结构上 online encoder 多了一个 predictior。 online encoder H1的预测Z1 ,来和 target encoder的输出H2 计算mse损失(归一化余弦相似度 也相当于是 两个矩阵相减的 F范数的变形, 余弦相似性大,越相似,mse越小)
BYOL和BGRL都是非对称的编码器,简单的mse居然work。 而后面两个方法都是 shared encoder,因此都采用 单位矩阵 再次进行推远(防止平凡解)
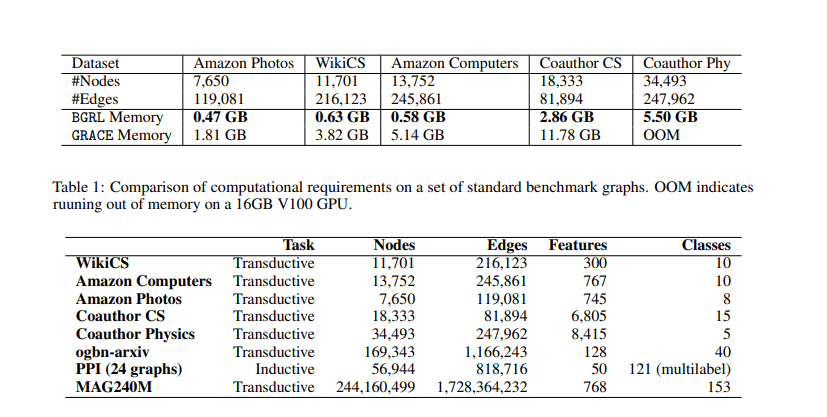
实验~
2. CCA-SSG
共享的 encoder
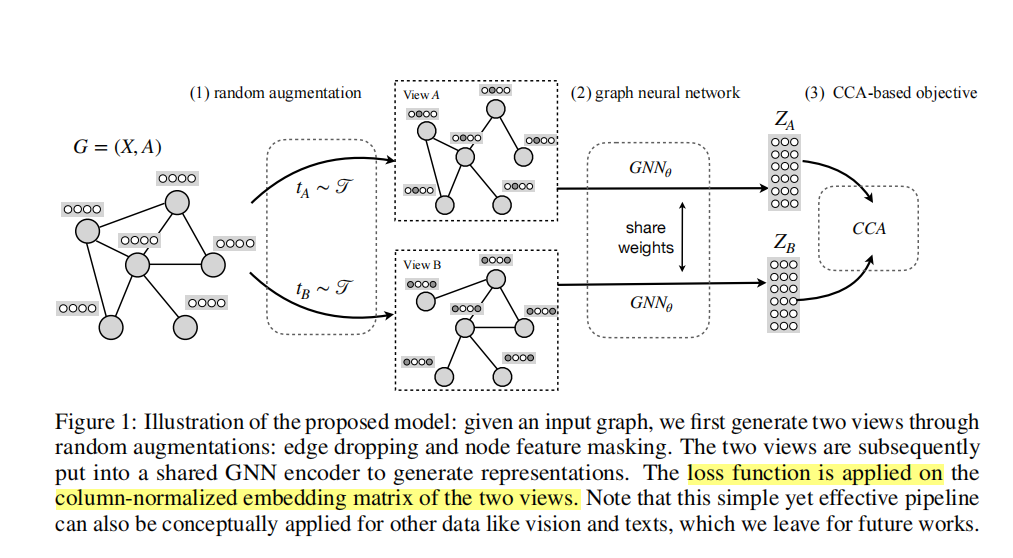
去 均值,方差
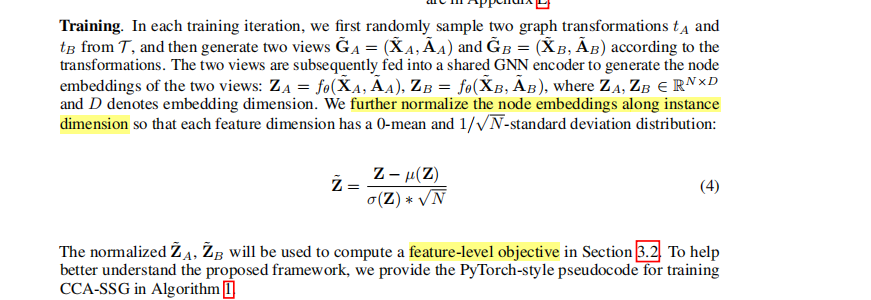
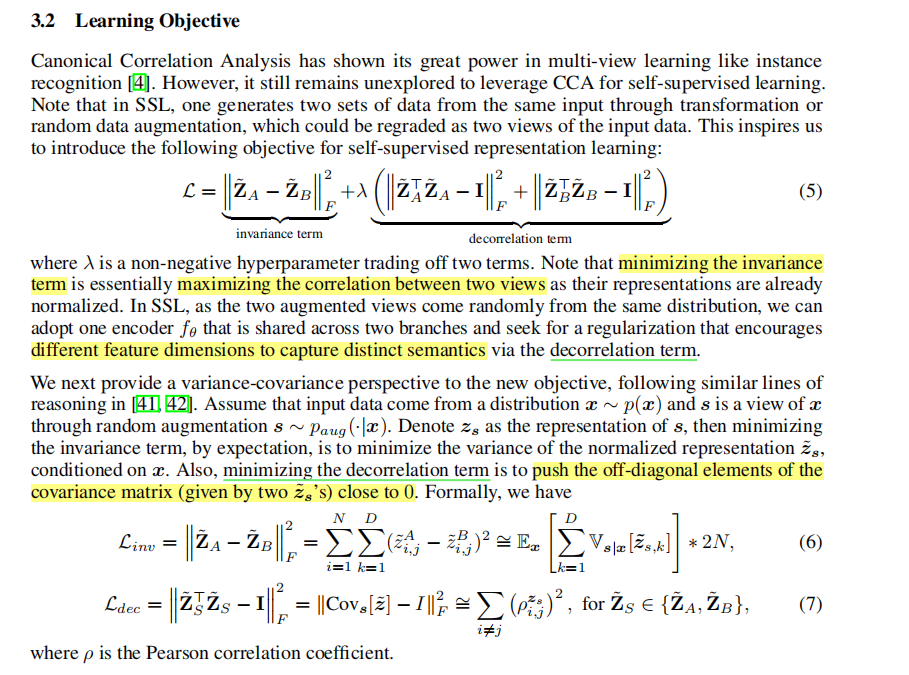
损失: 第一项:最小化 不变项==最大化两个视角间的相关性。 第二项:使得两个表征内积(协方差矩阵)对角元素=1,非对角元素=0, 第一项 也就相当于BYOL的损失,但是BYOL不对称encoder,batchnorm等是 BYOL单损失 有效性的原因。 但是 这个第二项 是很类似 Barlow twins的 损失。 这里注意 是矩阵的转置*矩阵,因此第二项 是 求出 特征的协方差矩阵 , 使特征 维度 之间 彼此独立(不相关)。
3. GBT
增强的方式:丢弃边,特征mask,伯努利采样GRACE做法
共享的encoder,没有 projector来进行降维(和Barlow twins不同的,因为graph dim不高)
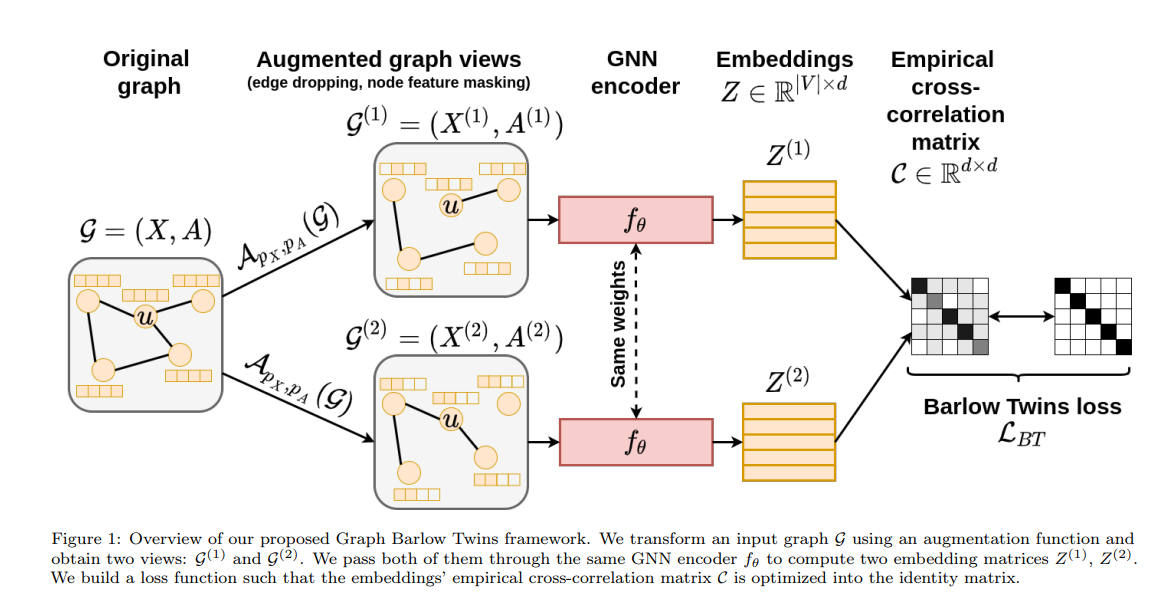
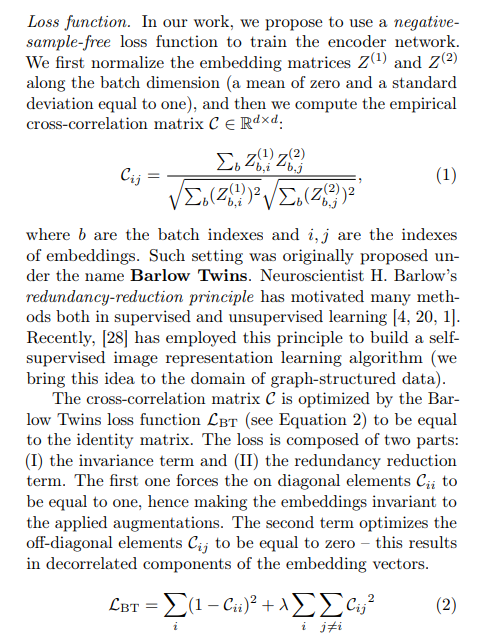
同样 0 均值方差标准化。 计算两个表征内积。 损失函数 第一项:不变项,使得Cij中对角元素=1, 使得 两个视图中 idx相同的节点 相同维度 对于试图增强的不变性(不同视图中 一样的节点相似) 第二项: 非对角元素 尽可能都逼近于0, 不同维度之间不相关
猛地一看。 和CCA-SSG很相似。 CCA-SSG是 两个表征进行mse后 CCA-SSG的第二项就去 做了这个事情,GBT是 两个视角特征间, CCS-SSG是 各自视图的表征之间特征冗余消除(相当于是 非对角 等于0)。
GBT的损失更好理解: 两个表征内积 后的矩阵 趋近于单位矩阵,一方面 对角=1,非对角=0



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









