







如题,在一个数据解析函数中使用了*(float *)&data[offset],其中data为uint8类型指针,指向的value地址为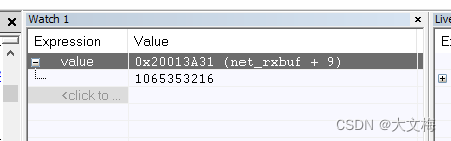
可以看到地址0x20013A31非对齐,最终在执行VLDR指令时导致跑飞
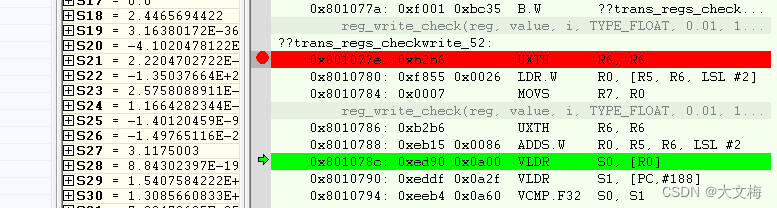
VLDR需要使用对齐访问
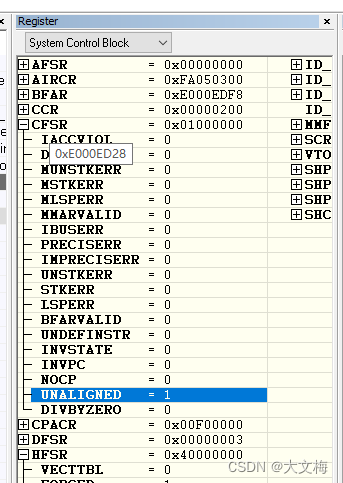
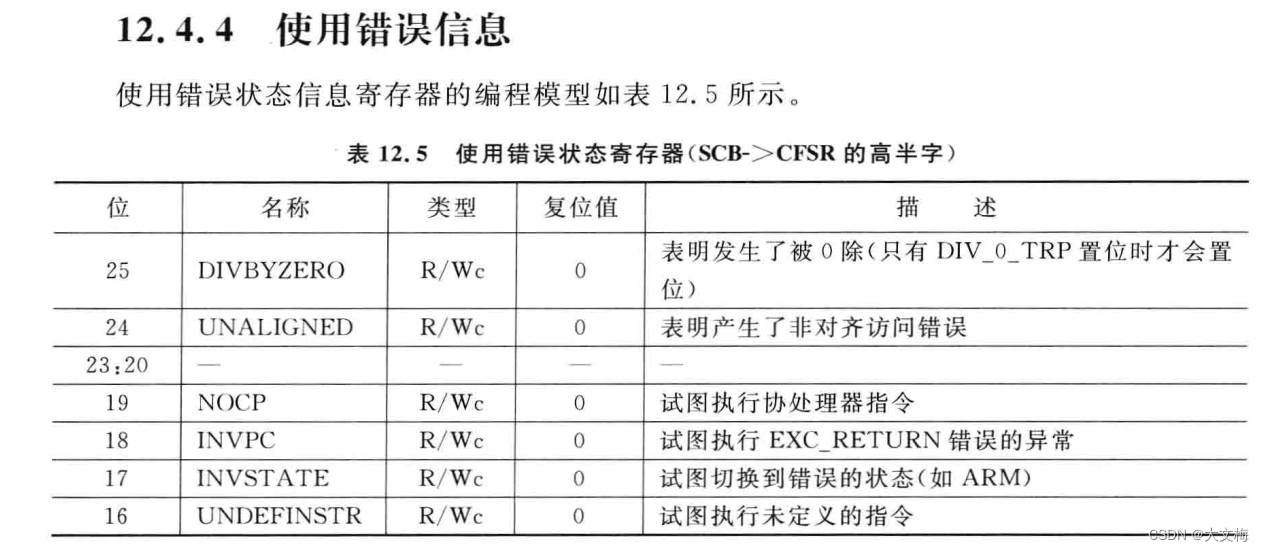
跑飞后查看SCB寄存器发现确实是非对齐访问导致跑飞,
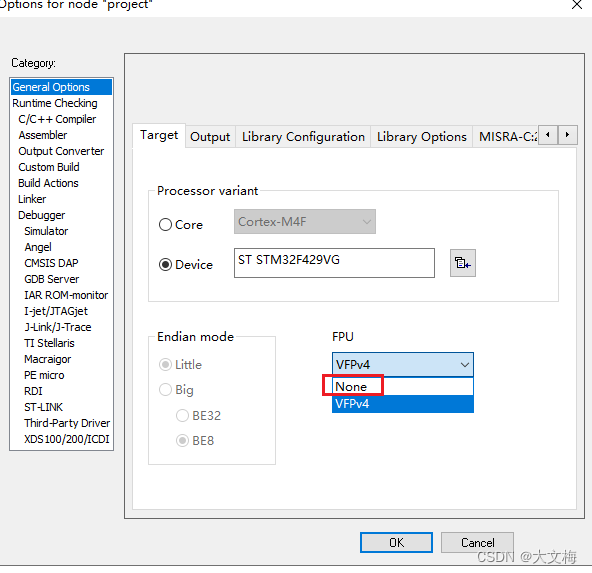
有两种解决方式,一种是关闭浮点运算,如iar
或者强转时使用中间变量,如
u32temp = data[offset]; 如题,在一个数据解析函数中使用了*(float *)&data[offset],其中data为uint8类型指针,指向的value地址为
可以看到地址0x20013A31非对齐,最终在执行VLDR指令时导致跑飞
VLDR需要使用对齐访问
跑飞后查看SCB寄存器发现确实是非对齐访问导致跑飞,
有两种解决方式,一种是关闭浮点运算,如iar
或者强转时使用中间变量,如
u32temp = data[offset];  2054
1380
2054
1380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

























