题意
- 就是给你一个大小为w×hw\times hw×h的矩形,然后让你在矩形内选三个点,使得三个点的距离分别为a,b,ca,b,ca,b,c
题解
- 考虑旋转或者翻转三角形使得其放得下为止,然后大概就是分类大讨论了
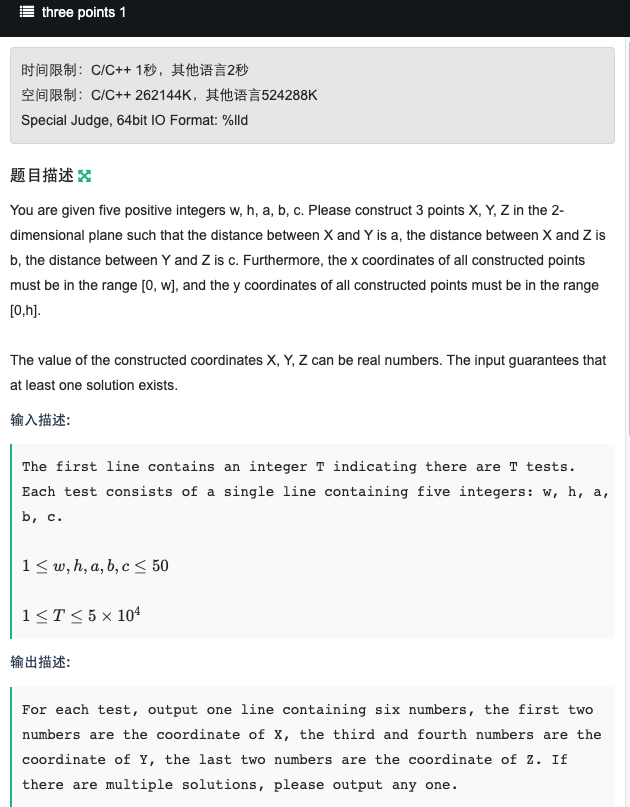
- 考虑枚举放在最下面的那条边【图中蓝色边】,可以将其正对www放下也可以正对hhh放下,这里值讨论正对www放下,另外一个类比即可
- 第一种情况,能放到www身上,checkcheckcheck第三个点即可
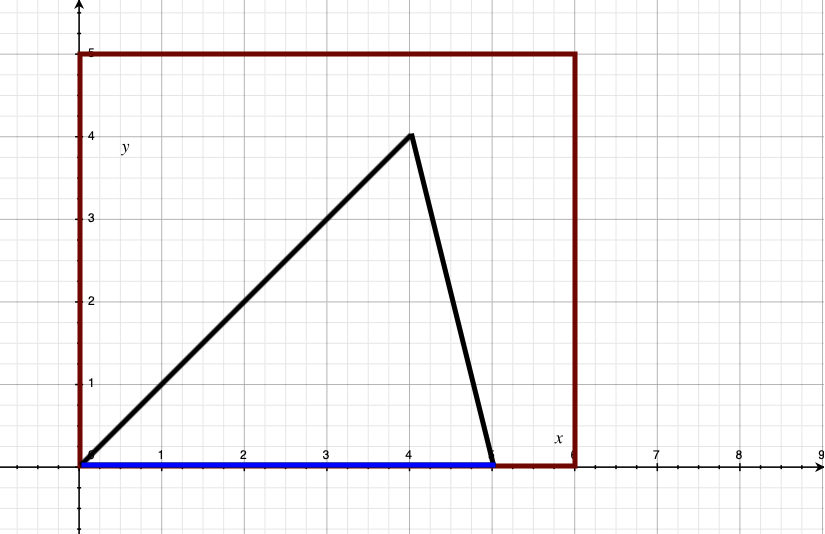
- 第二种情况,不能放下去,很容易算出上面那个点坐标
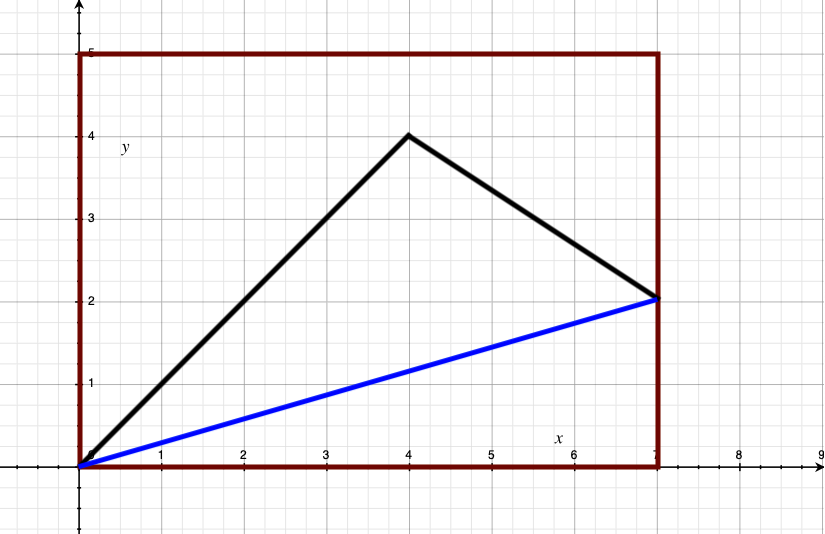
- 第三种情况容易忽视,即有可能需要倒着放
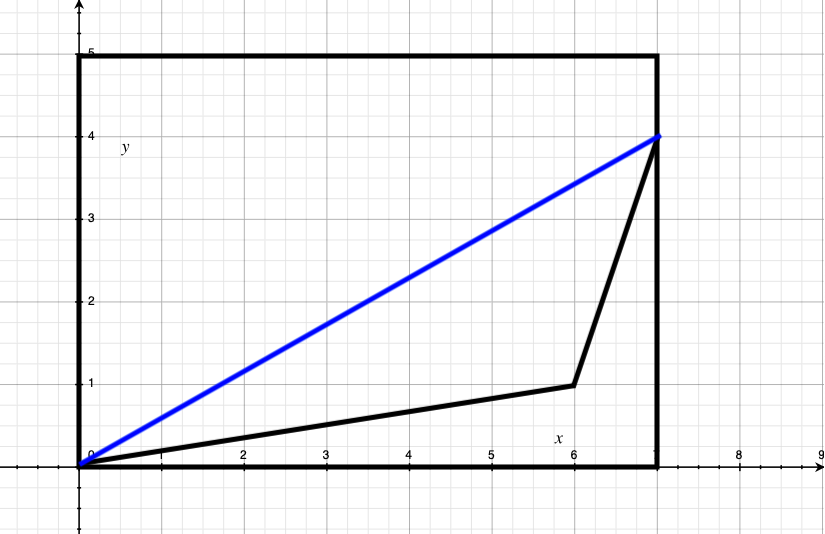
- 然后枚举每一条边作为底边和邻边,并且考虑正对www还是正对hhh放即可
- 又是一个多么痛的领悟,判断边界时需要写<w+eps<w+eps<w+eps和h+epsh+epsh+eps,赛场上只判了>−eps>-eps>−eps,上界没有加epsepseps,天真的以为损失精度=数变小了,wawawa了一万年
代码
#include<bits/stdc++.h>
using namespace std;
const double eps=1e-8;
#define pi acos(-1.0)
int sgn(double k)
{
return k<-eps?-1:(k<eps?0:1);
}
void print(double a)
{
char buffer[1000];
sprintf(buffer+1,"%.10lf",a);
int len=strlen(buffer+1);
bool ok=false;
for(int i=1;i<=len;i++) if(!(buffer[i]=='.'||buffer[i]=='0'||buffer[i]=='-')) {ok=true;break;}
if(ok) printf("%s",buffer+1);
else printf("%.10lf",0.0);
}
typedef struct point{
double x,y;
point(double a=0,double b=0) {
x=a;y=b;
}
point operator+(point other) {
return point(x+other.x,y+other.y);
}
point operator-(point other) {
return point(x-other.x,y-other.y);
}
point operator*(double k) {
return point(x*k,y*k);
}
friend double dis(point p1,point p2) {
return sqrt((p1.x-p2.x)*(p1.x-p2.x)+(p1.y-p2.y)*(p1.y-p2.y));
}
friend point extend(point p,double len) {
if(sgn(dis(point(0,0),p))==0) return point(0,len);
return point(p*(len/dis(point(0,0),p)));
}
friend point rotate(point p1,point p2,double a) {
point vec=p2-p1;
double xx=vec.x*cos(a)+vec.y*sin(a);
double yy=vec.y*cos(a)-vec.x*sin(a);
return point(p1.x+xx,p1.y+yy);
}
}Vector;
bool valid(point p1,double w,double h)
{
return sgn(p1.x)>=0&&sgn(p1.x-w)<=0&&sgn(p1.y)>=0&&sgn(p1.y-h)<=0;
}
point ans[3];
bool check(double w,double h,double x,double y,double z,int a,int b,int c)
{
if(sgn(sqrt(w*w+h*h)-x)<0) return false;
double angle_y=acos((x*x+z*z-y*y)/(2*x*z));
if(sgn(x-w)<=0) {
Vector cur=extend(Vector(x,0),z);
ans[a]=point(x,0);ans[c]=point(0,0);ans[b]=cur;
point res=rotate(ans[c],ans[b],2*pi-angle_y);
if(valid(res,w,h)) {ans[b]=res;return true;}
}else{
double he=sqrt(x*x-w*w);
Vector cur=extend(Vector(w,he),z);
ans[a]=point(w,he);ans[c]=point(0,0);ans[b]=cur;
point res=rotate(ans[c],ans[b],angle_y);
if(valid(res,w,h)) {ans[b]=res;return true;}
res=rotate(ans[c],ans[b],2*pi-angle_y);
if(valid(res,w,h)) {ans[b]=res;return true;}
}
if(sgn(x-h)<=0) {
Vector cur=extend(Vector(0,x),z);
ans[a]=point(0,x);ans[c]=point(0,0);ans[b]=cur;
point res=rotate(ans[c],ans[b],angle_y);
if(valid(res,w,h)) {ans[b]=res;return true;}
}else {
double he=sqrt(x*x-h*h);
Vector cur=extend(Vector(he,h),z);
ans[a]=point(he,h);ans[c]=point(0,0);ans[b]=cur;
point res=rotate(ans[c],ans[b],angle_y);
if(valid(res,w,h)) {ans[b]=res;return true;}
res=rotate(ans[c],ans[b],2*pi-angle_y);
if(valid(res,w,h)) {ans[b]=res;return true;}
}
return false;
}
void outt()
{
for(int i=0;i<=2;i++) {
print(ans[i].x);printf(" ");
print(ans[i].y);printf(i==2?"\n":" ");
}
}
int main()
{
int t;scanf("%d",&t);
while(t--) {
double w,h,a,b,c;scanf("%lf %lf %lf %lf %lf",&w,&h,&a,&b,&c);
if(check(w,h,a,b,c,0,2,1)) {outt();continue;}
if(check(w,h,a,c,b,1,2,0)) {outt();continue;}
if(check(w,h,b,a,c,0,1,2)) {outt();continue;}
if(check(w,h,b,c,a,2,1,0)) {outt();continue;}
if(check(w,h,c,a,b,1,0,2)) {outt();continue;}
if(check(w,h,c,b,a,2,0,1)) {outt();continue;}
assert(false);
}
}








 探讨在一个w×h的矩形中选择三个点,使它们之间的距离分别为a、b、c的问题。通过旋转和翻转三角形,讨论了如何在矩形内放置这些点,包括正对宽或高放置,以及特殊情况的处理。
探讨在一个w×h的矩形中选择三个点,使它们之间的距离分别为a、b、c的问题。通过旋转和翻转三角形,讨论了如何在矩形内放置这些点,包括正对宽或高放置,以及特殊情况的处理。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









