




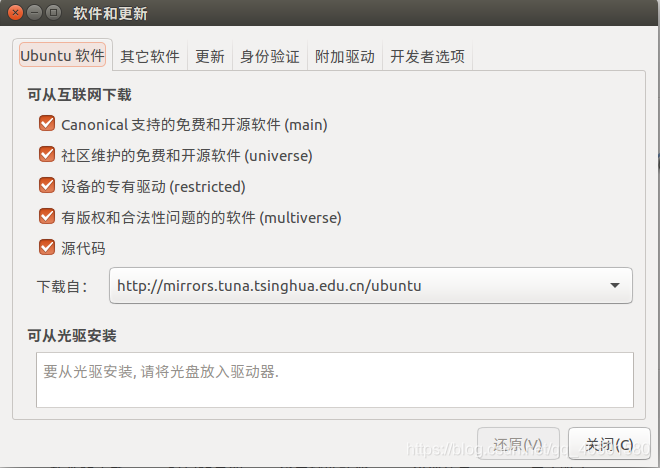
1、在系统设置里面选择左下的“软件和更新”

2、把源代码勾选上,然后点击“下载自”,选择清华的站点(下载速度快)
3、从设置 sources.list开始,与下面的博文中的步骤一致,详情参考如下博文。
Ubuntu 16.04 安装 ROS:https://blog.youkuaiyun.com/tq08g2z/article/details/79209435
4、利用钢铁侠科技公司提供的快捷安装方式,无脑安装ros-kinetic
因为参加恩智浦杯智能汽车竞赛室外光电竞速项目,官方提供了一种无脑安装ros-kinetic桌面完整版的文件,在racecar文件下运行终端,输入./install.sh即可。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









