






 本文详细介绍了如何在PSOC62开发板上基于RT_thread操作系统配置和使用PWM驱动L298N电机控制器。通过修改board/Kconfig和RT_thread设置,以及更新drv_pwm.h和drv_pwm.c文件,实现了对电机的正反转控制。在sys_init()函数中初始化了L298N的输入引脚模式,并在main函数中调用相关函数进行运行、后退和停止操作。
本文详细介绍了如何在PSOC62开发板上基于RT_thread操作系统配置和使用PWM驱动L298N电机控制器。通过修改board/Kconfig和RT_thread设置,以及更新drv_pwm.h和drv_pwm.c文件,实现了对电机的正反转控制。在sys_init()函数中初始化了L298N的输入引脚模式,并在main函数中调用相关函数进行运行、后退和停止操作。
1.新建工程
选择基于开发板为PSOC62-IFX-EVAL-KIT
BSP为1.0.3
选择RT_thread为5.0.1
2.硬件连接
硬件:L298N电机驱动
| L298N | B2B | B2A | B1B | B1A | ENA | IN1 | IN2 | IN3 | IN4 | ENB |
| Port | 5.0 | 5.1 | 11.2 | 11.3 | 11.4 | 11.5 | 5.6 | 5.7 | 0.5 | 0.2 |
| 功能 | 右电机编码器 | 左电机编码器 | 左轮PWM | 左进 | 左退 | 右进 | 右退 | 右轮pwm | ||
| 特殊功能 | pwm0channel3 | pwm0channel1 | ||||||||
3.board/Kconfig设置
menuconfig BSP_USING_PWM0_CH1
bool "Enable PWM0 channel1"
default n
if BSP_USING_PWM0_CH1
config BSP_USING_PWM0_PORT0
bool "Enable PWM0-PORT0 output pwm"
default n
endif
menuconfig BSP_USING_PWM0_CH3
bool "Enable PWM0 channel3"
default n
if BSP_USING_PWM0_CH3
config BSP_USING_PWM0_PORT11
bool "Enable PWM0-PORT11 output pwm"
default n
endif4.RT_thread设置
打开RT-thread settings,进入硬件,选中下列PWM项,保存退出
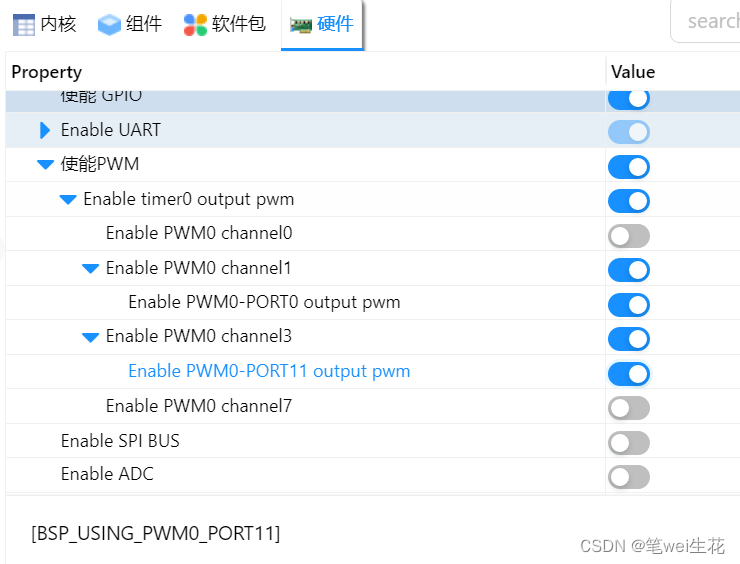
此时rtconfig.h中会出现
#define BSP_USING_PWM0
#define BSP_USING_PWM0_PORT0
#define BSP_USING_PWM0_CH1
#define BSP_USING_PWM0_CH3
#define BSP_USING_PWM0_PORT11同时libraries/HAL_Drivers下会出现drv_pwm.h和drv_pwm.c
5.修改drv_pwm.h
仿照其他内容新增如下项
#ifndef PWM0_CH1_PORT0_CONFIG
#define PWM0_CH1_PORT0_CONFIG \
{ \
.name = "pwm0", \
.channel = 1, \
.gpio = GET_PIN(0, 2), \
}
#endif /* PWM0_CH1_PORT0_CONFIG */
#ifndef PWM0_CH3_PORT11_CONFIG
#define PWM0_CH3_PORT11_CONFIG \
{ \
.name = "pwm0", \
.channel = 3, \
.gpio = GET_PIN(11, 4), \
}
#endif /* PWM0_CH3_PORT11_CONFIG */6.修改drv_pwm.c
新增第32行中的static struct ifx_pwm ifx_pwm_obj[]项如下:
#ifdef BSP_USING_PWM0_PORT0
PWM0_CH0_PORT0_CONFIG,
PWM0_CH1_PORT0_CONFIG,
#endif
#ifdef BSP_USING_PWM0_PORT11
PWM0_CH3_PORT11_CONFIG,
#endif7.相关rt_thread函数介绍
使用到的rt_thread函数介绍:
rt_device_find(const char* name)
应用程序通过该接口查找到设备,然后使用I/O设备管理接口来访问硬件
rt_pwm_set(struct rt_device_pwm *device,
int channel,
rt_uint32_t period,
rt_uint32_t pulse);
设置PWM周期和脉冲宽度
rt_pwm_enable(struct rt_device_pwm *device, int channel);
使能PWM设备
8.PWM命令驱动两轮
#define PWM_DEV_NAME "pwm0"
#define PWM_DEV_CHANNEL 3
#define PWM1_DEV_NAME "pwm0"
#define PWM1_DEV_CHANNEL 1
struct rt_device_pwm *pwm_dev;
struct rt_device_pwm *pwm1_dev;
int pwm_init(void)
{
rt_uint32_t period, pulse, dir;
period = 1 * 1000 * 1000;
dir = 1;
pulse = 0;
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
pwm1_dev = (struct rt_device_pwm *)rt_device_find(PWM1_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);
return -RT_ERROR;
}
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
rt_pwm_set(pwm1_dev, PWM1_DEV_CHANNEL, period, pulse);
rt_pwm_enable(pwm1_dev, PWM1_DEV_CHANNEL);
rt_kprintf("Now PWM[%s] Channel[%d] Period[%d] Pulse[%d]\n", PWM_DEV_NAME, PWM_DEV_CHANNEL, period, pulse);
while (1)
{
rt_thread_mdelay(50);
if (dir)
{
pulse += 100000;
}
else
{
pulse -= 100000;
}
if (pulse >= period)
{
dir = 0;
}
if (0 == pulse)
{
dir = 1;
}
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
rt_pwm_set(pwm1_dev, PWM1_DEV_CHANNEL, period, pulse);
}
}9.L298N初始化
#define IN1 GET_PIN(11, 5)
#define IN2 GET_PIN(5, 6)
#define IN3 GET_PIN(5, 7)
#define IN4 GET_PIN(0, 5)
#define left_run {rt_pin_write(IN2, PIN_LOW);rt_pin_write(IN1, PIN_HIGH);}
#define right_run {rt_pin_write(IN4, PIN_LOW);rt_pin_write(IN3, PIN_HIGH);}
#define left_back {rt_pin_write(IN1, PIN_LOW);rt_pin_write(IN2, PIN_HIGH);}
#define right_back {rt_pin_write(IN3, PIN_LOW);rt_pin_write(IN4, PIN_HIGH);}
#define left_stop {rt_pin_write(IN2, PIN_LOW);rt_pin_write(IN1, PIN_LOW);}
#define right_stop {rt_pin_write(IN4, PIN_LOW);rt_pin_write(IN3, PIN_LOW);}
void sys_init(void)
{
rt_pin_mode(IN1, PIN_MODE_OUTPUT);
rt_pin_mode(IN2, PIN_MODE_OUTPUT);
rt_pin_mode(IN3, PIN_MODE_OUTPUT);
rt_pin_mode(IN4, PIN_MODE_OUTPUT);
}
void run(void){
left_run;
right_run;
}
void back(void){
left_back;
right_back;
}
void stop(void){
left_stop;
right_stop;
}10.加入main函数中
int main(void)
{
rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);
sys_init();
run();
for (;;)
{
rt_pin_write(LED_PIN, PIN_HIGH);
rt_thread_mdelay(500);
pwm_init();
rt_pin_write(LED_PIN, PIN_LOW);
rt_thread_mdelay(500);
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









