






相对运动的基本方式
相机静止,目标运动 — 背景提取(减除)
相机运动,目标静止 — 光流估计(全局运动)
相机和目标均运动 — 光流估计
帧差法运动目标检测
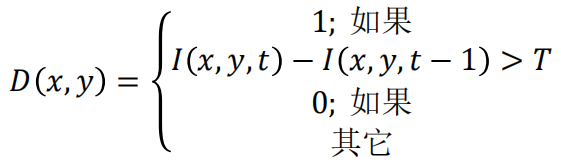
D(x,y):帧差
I(x,y,t):当前帧(t时刻)图像
I(x,y,t):上一帧(t-1时刻)图像
T:像素灰度差阈值
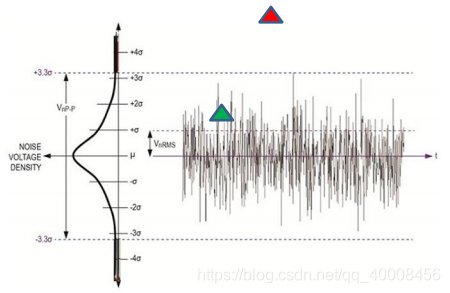
高斯背景
像素灰度值随时间变化符合高斯分布
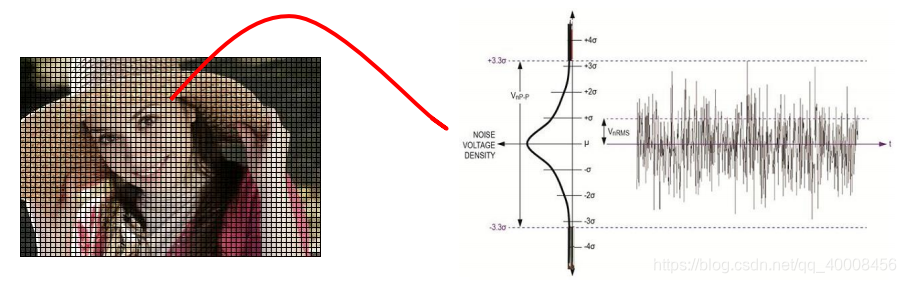
 则为前景,否则为背景
则为前景,否则为背景
混合高斯模型
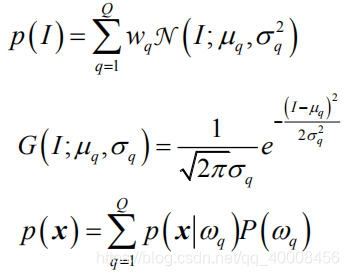
任何一种分布函数都可以看作是多个高斯分布的组合
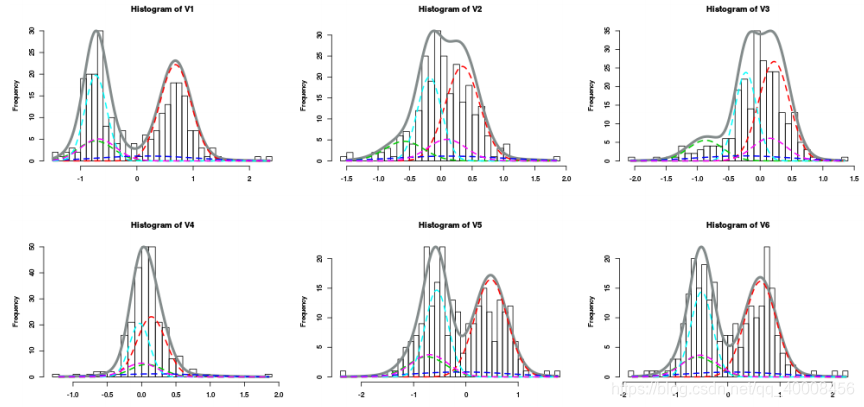
任何一种分布都可以看作是多个高斯分布的组合
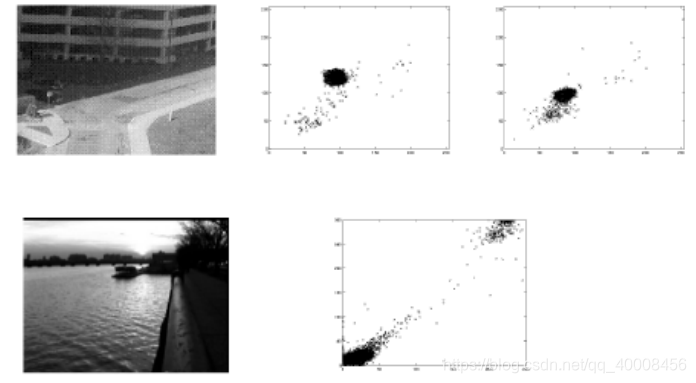
像素灰度(随时间)的概率密度函数:
混合高斯背景建模步骤
模型初始化 将采到的第一帧图像的每个像素的灰度值作为均值,再赋以较大的方差。初值Q=1,w=1.0。
模型学习 将当前帧的对应点像素的灰度值与已有的Q个高斯模型作比较,若满足![]() ,则按照上面方式调整第q个高斯模型的参数和权重;否则转入(3)
,则按照上面方式调整第q个高斯模型的参数和权重;否则转入(3)
增加/替换高斯分量 若不满足条件,且q<Q,则增加一个新分量;若q=Q,则替换
判断背景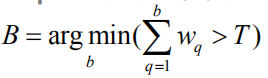
判断前景
混合高斯模型迭代计算原理
迭代计算:
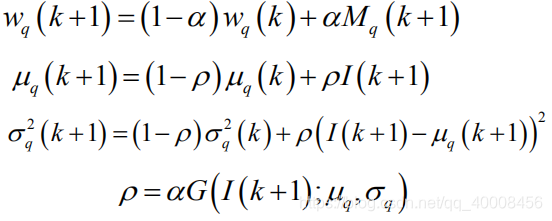
Mq(k)为二值化函数,仅当像素值匹配第q类时取1,其余为0
类别数取值不大于5

















 1014
1014

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









