




@STM32输入捕获测试频率和正负脉宽
本博客相关程序调用转载正点原子
正点原子@ALIENTEK
广州市星翼电子科技有限公司
这次做的主要是测试频率,但系,也趁此机会捕获了高低脉宽的时间,题目所说的脉宽是指脉宽时间,大大们有需要可以在输出语句中计算改正,本人小白,谢谢指导
关于建工程
正点原子大大们已经写好,直接进行粘贴复制。
关于这个实验
功能
上面说了,测试频率和正负脉宽
精度
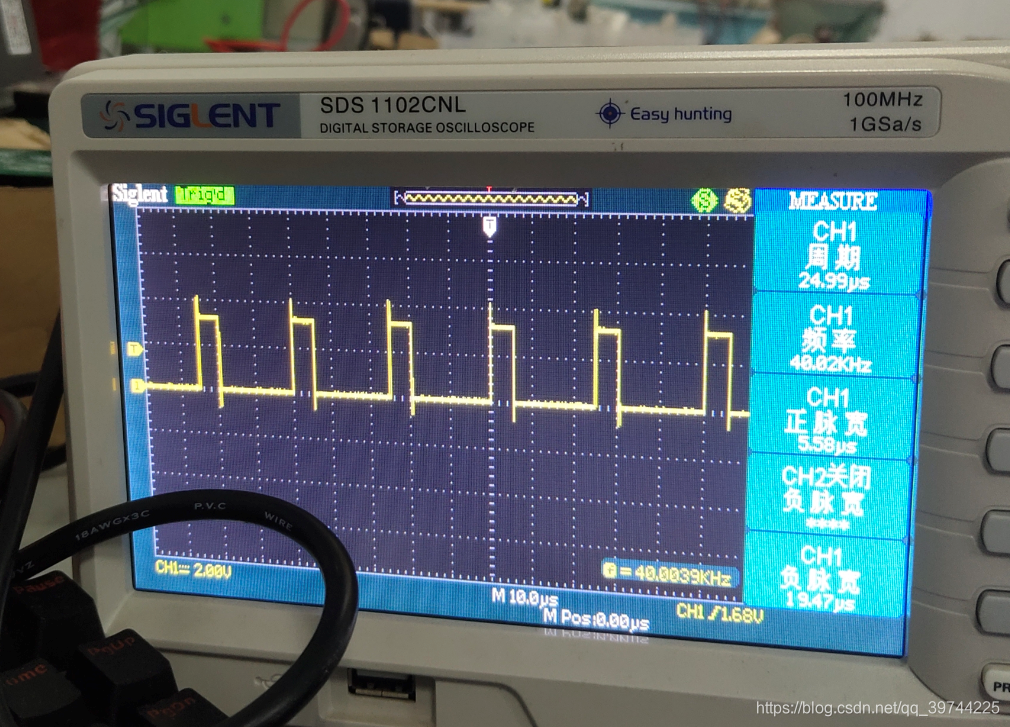
特意测试了正点原子例程,正点原子是PWM输出,PA0端口捕获频率,PWM输出的频率是80KHZ,但无法测试脉宽在3US以下的波形
TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
利用示波器进行测试,脉冲宽度约为12.5us(这也代表PWM输出的准确–>1/80K)
而设置的计数器计数频率为1M,也就是说计一个数为1us(原本系统时钟频率为72M,进行72分频(72-1)这个格式,手册里面有说明)
TIM5_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数 ,72分频
计算思路
就是看一个上升沿和下降沿还有总的周期的计数个数(重装载寄存器里面的),然后乘以计数时间1US
频率处理:1/(计数个数*计数时间)计数时间为us
关于我写的文件
写了两种方法,但是没有用高级定时器,以为计数频率时间为1us,所以采用了通用定时器TIM5,后来还是有误差滴,,,,,
文件一:采用检测两次高电平之间的周期宽度计算后就是频率。
相关的中断处理程序
//定时器5中断服务程序
void TIM5_IRQHandler(void)
{
if((TIM5CH1_CAPTURE_STA&0X80)==0)//还未成功捕获
{
if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET)
{
if(TIM5CH1_CAPTURE_STA&0X40)//已经捕获到高电平了
{
if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
{
TIM5CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次
TIM5CH1_CAPTURE_VAL=0XFFFF;
}else TIM5CH1_CAPTURE_STA++;
}
}
if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕获1发生捕获事件
{
if(TIM5CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM_SetCounter(TIM5,0);
TIM5CH1_CAPTURE_VAL=0;
TIM5CH1_CAPTURE_STA=0; //清空
TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
TIM5CH1_CAPTURE_STA&=!0X40;//标记捕获到了下降沿
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
time_l=TIM5CH1_CAPTURE_STA&0X3F;
time_l *= 65536;
time_l += (2);
TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);
time_l += TIM5CH1_CAPTURE_VAL;
TIM5CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=1 设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位
}
这个只检测频率,精度还阔以,但是理论精度大约在25HZ–250KHZ,实际测试精度在 28HZ–80KHZ,剩下的还没实现,可以通过设置计数的频率来提高精度,本实验是1us测试一次,因此1US以下的就拜拜了
优点:占空比无论咋样都可以测出来,高点的频率适合(几千几十千赫兹那种)
文件二:采用检测一个周期高低电平宽度和总的脉冲宽度。
上面说过,利用示波器特意测试了他的检测效果,无法测试脉宽在3US以下的波形
因此,这儿有个误差为3US
看代码
//定时器5中断服务程序
void TIM5_IRQHandler(void)
{
if((TIM5CH1_CAPTURE_STA&0X80)==0)//还未成功捕获
{
if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET)
{
if(TIM5CH1_CAPTURE_STA&0X40)//已经捕获到高电平了
{
if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
{
TIM5CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次
TIM5CH1_CAPTURE_VAL=0XFFFF;
}else TIM5CH1_CAPTURE_STA++;
}
}
if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕获1发生捕获事件
{
if(TIM5CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM_SetCounter(TIM5,0);
TIM5CH1_CAPTURE_VAL=0;
TIM5CH1_CAPTURE_STA=0; //清空
TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
time_h=TIM5CH1_CAPTURE_STA&0X3F;
time_h *= 65536;
time_h += 2;
TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);
time_h += TIM5CH1_CAPTURE_VAL;
TIM5CH1_CAPTURE_STA&=!0X40;//标记捕获到了下降沿
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //CC1P=0 设置为上升沿捕获
}else //还未开始,第一次捕获上升沿
{
TIM_SetCounter(TIM5,0);
TIM5CH1_CAPTURE_VAL=0;
TIM5CH1_CAPTURE_STA=0; //清空
TIM5CH1_CAPTURE_STA &=!0X80; //标记成功捕获到一次低电平脉宽
time_l=TIM5CH1_CAPTURE_STA&0X3F;
time_l *= 65536;
time_l += 3;
TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);
time_l += TIM5CH1_CAPTURE_VAL;
TIM5CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=1 设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位
}
上面程序里面有下面两个代码段,大家可以认为这是我自作聪明手动平衡误差的(个人认为,这种干啥也不要程序平衡误差,适用性低
,罪过罪过,,,,)
time_h += 2;
time_l += 3;
关于输出:while里面
printf("-------------------------------\r\n");
printf("高电平持续时间:%d us\r\n",time_h);
printf("低电平持续时间:%d us\r\n",time_l);
printf("时间:%d us\r\n",time);
temp = (time_h + time_l);
temp = 999999 / (temp);
printf("频率:%d HZ\r\n",temp);
TIM5CH1_CAPTURE_STA=0;//开启下一次捕获
适用范围
低频,并且高电平脉宽或低电平脉宽不低于3US,高点的频率会崩
注意
若脉宽差别较大,则其误差方式为二倍高脉宽,导致的结果为–>频率
啥是脉宽差别,举个例子,比如高电平脉宽11.3,低电平脉宽小于3us,小于3us无法检测,那么他的高电点平脉宽默认都为11us,结果相当于大约减少一半

大部分程序使用正点原子例程(我好水)
还有,对不起,那示波器不会截屏,咱也不敢问,大佬多多担待
上面的两张图片PWM输出如下:
/************************************************
ALIENTEK战舰STM32开发板实验9
PWM输出实验
技术支持:www.openedv.com
淘宝店铺:http://eboard.taobao.com
关注微信公众平台微信号:"正点原子",免费获取STM32资料。
广州市星翼电子科技有限公司
作者:正点原子 @ALIENTEK
************************************************/
int main(void)
{
// u16 led0pwmval=0;
// u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM3_PWM_Init(899,1); //不分频。PWM频率=72000000/900=80Khz 72000000/19200=3750hz128分频 = 29.296875HZ
while(1)
{
// delay_ms(10);
// if(dir)led0pwmval++;
// else led0pwmval--;
// if(led0pwmval>300)dir=0;
// if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,50);
}
}
解释下代码段:
TIM3_PWM_Init(899,1); //不分频。PWM频率=72000000/900=80Khz 72000000/19200=3750hz128分频 = 29.296875HZ
是调频率,后面写的72000000/19200=3750hz128分频 = 29.296875HZ对应语句:
TIM3_PWM_Init(19199,128-1);
下面这个是占空比
TIM_SetCompare2(TIM3,50);
可以自己搞到3US试试
附的有程序

















 4792
4792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









