







 本文探讨了机器学习中常用的优化技巧,包括归一化的作用、不同优化算法的特点(如SGD、Momentum、Nesterov Momentum、RMSprop及Adam等)、二阶优化方法的优缺点,以及模型集成的方法。这些技巧有助于提升神经网络模型的训练效率和泛化能力。
本文探讨了机器学习中常用的优化技巧,包括归一化的作用、不同优化算法的特点(如SGD、Momentum、Nesterov Momentum、RMSprop及Adam等)、二阶优化方法的优缺点,以及模型集成的方法。这些技巧有助于提升神经网络模型的训练效率和泛化能力。
归一化的作用:
当分割超平面改变时,预测分数变化较小。这样,神经网络容易训练。

-------------------------------
当各个超参数的作用不一样大(神经网络就是这样),random search 理论上更有优势。
------------------------------
sgd的问题:
(1)由于各个参数量级不一致,迭代呈之字形,很慢
(2)在接近局部极值的地方,梯度很慢,可能卡住(实际由于参数空间维度高,不会,但是慢)
(3)sgd一次一个样本,不能反映整体训练集,具有噪声。
-----------------------------------------------------------------------------------------

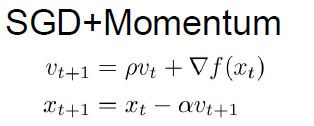
momentum:
(1)积累动量,在极值点附件梯度不会太小,可以冲过极值点
(2)无关方向的梯度被平均抵消了,有关方向的梯度变大了。
------------------------------------------------------------------------------------------------
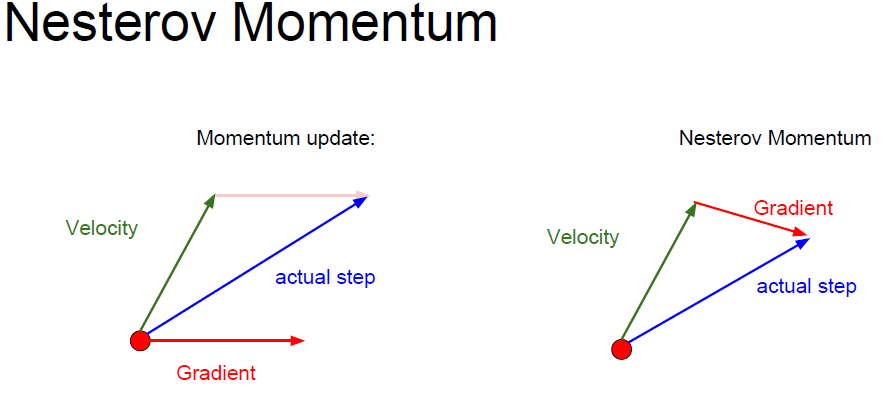
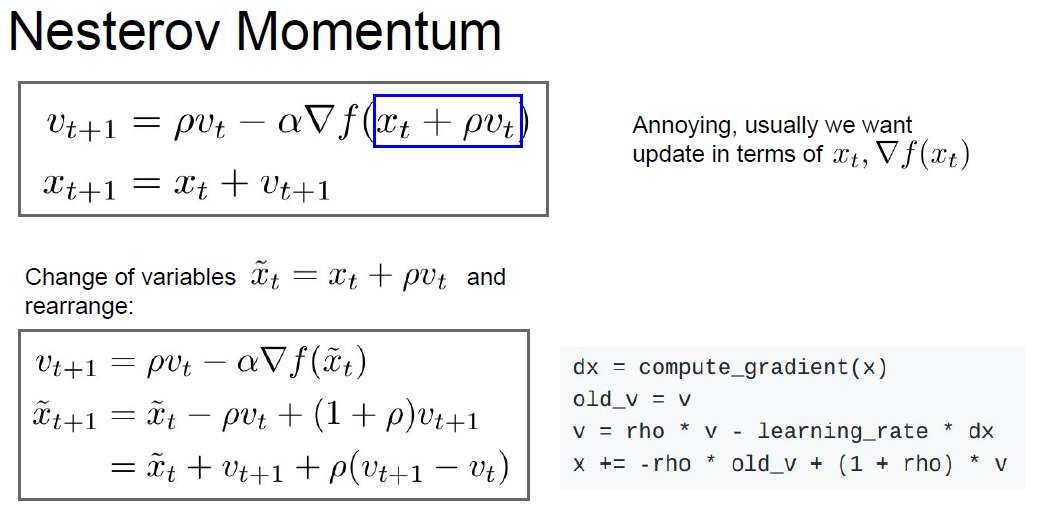
Nesterov momentum
已知velocity,估计gradient,求和
与momentum顺序相反
-------------------------------------------------------------------------------------------
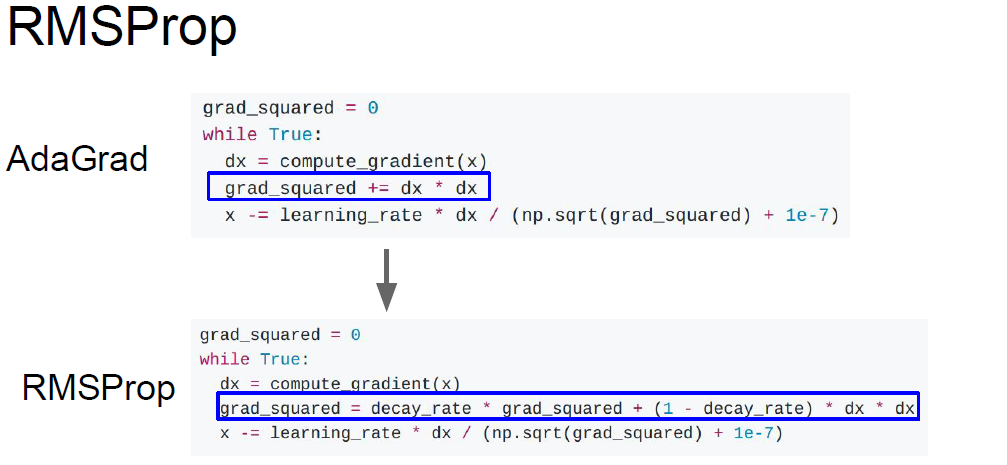
RMS是在AdaGrad基础上得到的
AdaGrad的梯度会越来越小,如果是凸优化问题,那么这样ok。但如果不是凸优化,很容易掉进局部极值里面去。
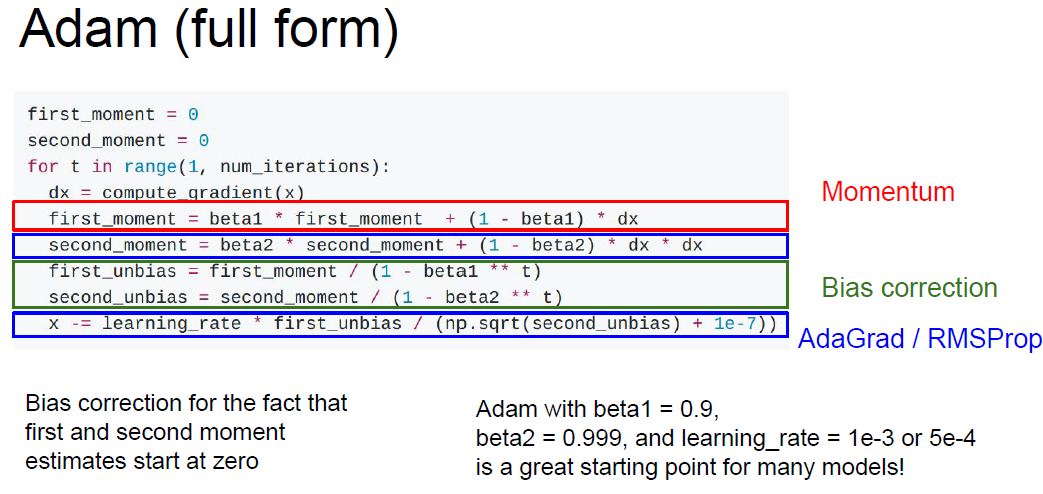
/(1-beta**t) 是为了避免最初几次迭代时,moment太小了,从而使得更新的梯度太大了,不符合实际
---------------------------------------------------------------------------------------------------
momentum 更新时容易绕路,它的更新方向大致限定在某一方向
RMS则较平滑
Adam结合了momentum和RMS,几乎是默认选择。
----------------------------------------------------------------------------------------------------
牛顿法二阶逼近(甚至不需要学习速率)海森矩阵求逆计算量大,o(N3)
拟牛顿法BFGS,LBFGS 对于mini batch效果不好,对于非凸优化问题不好(神经网络的损失函数就是非凸的) 对噪声敏感,鲁棒性差
深度学习不经常使用二阶逼近,毕竟参数太多了。
如果计算资源足够,可以试试full batch的LBGGS,一定要注意剔除noise
----------------------------------------------------------------------------------------------------------
model ensembles
使用不同的初始值,不同的超参数,训练出多个网络,集成起来,一般会提高几个百分点的正确率。在数据竞赛中经常使用,但是不适合工业。
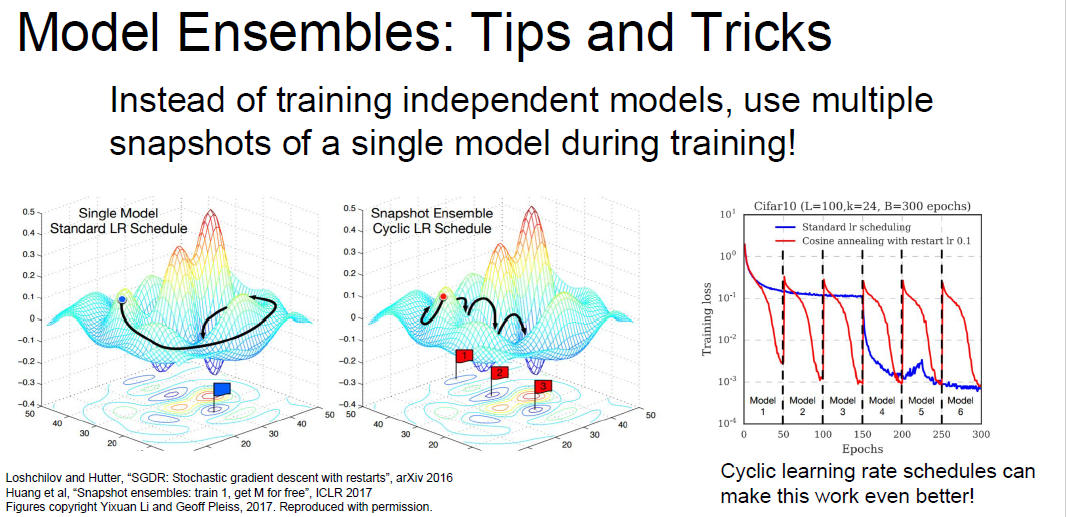
还可以记录一个模型在训练过程中不同时刻的参数,将这些集成起来。
--------------------------------------------------------------------------------------------
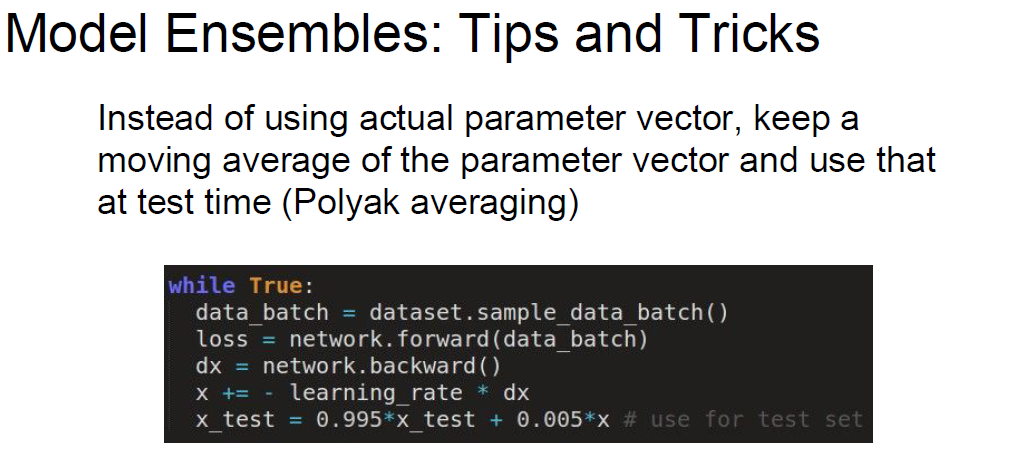
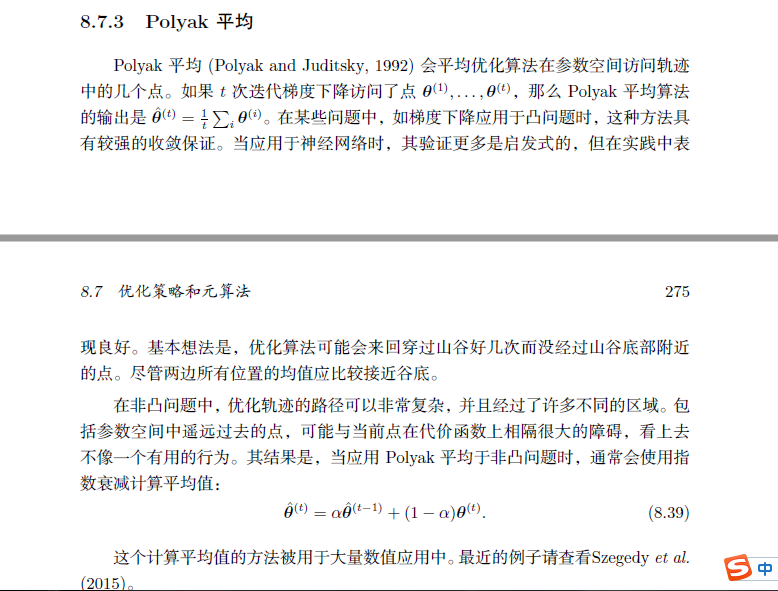
polyak averaging
对于一个网络训练过程中不同时期的参数做平均,然后使用平均参数作为test时候的参数。这个平均参数是集成的结果。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









