






 本文介绍了哈希查找算法,详细阐述了闭散列的哈希结构定义、初始化、增加、查找和删除数据的处理,包括线性探测和负载因子的概念。同时,解释了开散列的原理,以及在开散列中如何进行数据操作和扩容。通过对两种散列方法的理解,有助于提高数据存储和检索的效率。
本文介绍了哈希查找算法,详细阐述了闭散列的哈希结构定义、初始化、增加、查找和删除数据的处理,包括线性探测和负载因子的概念。同时,解释了开散列的原理,以及在开散列中如何进行数据操作和扩容。通过对两种散列方法的理解,有助于提高数据存储和检索的效率。
哈希查找算法
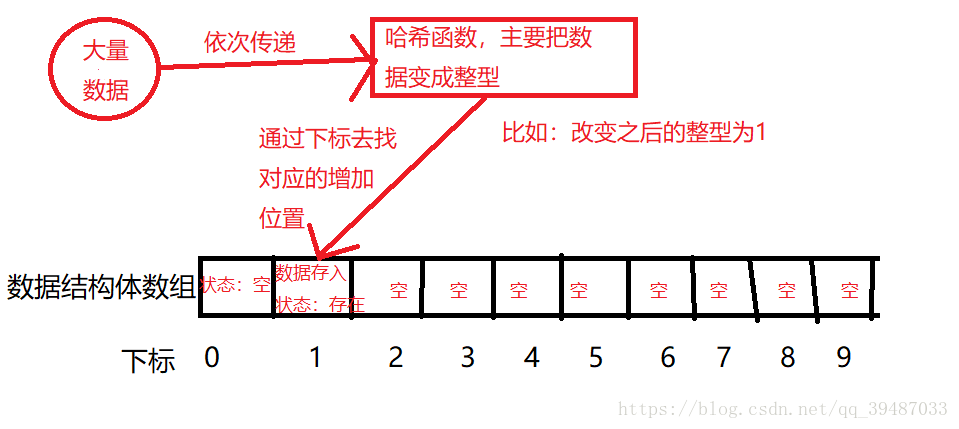
最普通的查找方法就是遍历整个数据,然后找到所查找的数,它的时间复杂度一般为O(n)。而哈希查找是用一个结构体数组存储所有数据,然后对所要查找的数,求它的哈希地址(一般就是数组的下标,求下标的方式是哈希函数,将输入数据(本例是字符串)转化为整型数字),从而直接找到此数,哈希查找的时间复杂度是O(1)。
闭散列
图解,结合文字再进行理解:
哈希结构的定义
一般哈希查找的存储结构体如下定义:
typedef int (*STINT)(const char * str); //这是一个函数指针类型的重命名
typedef char* Type;
typedef enum {EXIST,DELETE,EMPTY}State;
typedef struct DataState
{
Type data;
State state;
}DataState;
typedef struct HashStruct
{
DataState* Dasa; //哈希数组
int Size; //记录已经添加的数据量
int capacity; //哈希数组的容量大小
int tatol; //记录除了空位置剩余的位置数量
STINT _STInt; //创建函数指针,函数为哈希函数
}HashStruct,*pHashStruct;
哈希冲突
哈希地址的函数做不到让所有的数据都得到不同的哈希地址,所以可能会有不同的数得到相同的哈希地址,这叫做哈希冲突。
由于哈希冲突的存在,并且数组对应的下标只能保存一个数据,那么就必须让每个下标附带一个状态,来表示它是否已经储存数据。所以用一个结构体数组来保存数据。
哈希结构的初始化
哈希结构的初始化比较简单,就是给所有成员赋初值。数据值因为还没增加不用管,每个数组下标对应的状态是空,容量初值赋为10。代码如下:
void InitHashSearch(pHashStruct phs,STINT STInt)
{
int i = 0;
assert(phs);
phs->capacity = 10;
phs->Dasa = (DataState*)malloc(sizeof(DataState)*phs->capacity);
for(i=0 ;i<phs->capacity ;i++)
phs->Dasa[i].state = EMPTY;
phs->Size = 0;
phs->tatol = 0;
phs->_STInt = STInt; // 给哈希函数赋值,看第二个形参
}
哈希结构的增加数据
增加数据就得借助哈希函数了,将我们所输入的数据(本例是字符串)转化为整型作为下标,从而直接存入到哈希结构体的数组中去,具体看代码和注释:
int InsertHashSearch(pHashStruct phs,Type data)
{
int ret = HashCode(phs,data); //利用哈希函数得到哈希地址(数组下标)
assert(phs);
if(IsChangeC(phs)) //判断数据量是否达到负载因子
CheckCapacity(phs); //如果达到了,就扩容。
while(phs->Dasa[ret].state != EMPTY) //判断此位置的状态是否 不是空
{
if(phs->Dasa[ret].data == data) //如果不是,还要判断数据是否已经存在
return 0;
ret++; //判断为不是,说明已经产生了哈希冲突,
//此地址之前已经有数据了,就往后找空位置,这个下面详细解释
}
phs->Dasa[ret].data = data; //循环停止,说明找到空位置了 ,就在此位置增加元素
phs->Dasa[ret].state = EXIST; //将此位置的状态赋值为存在数据
phs->Size++; //数据量+1
phs->tatol++;
return 1;
}
线性探测
就是循环里面的ret++,虽然产生了哈希冲突,但是让地址往后++,直到找到状态为空的地址,这叫做线性探测。采用线性探测,实现起来非常简单,缺陷是: 一旦发生哈希冲突,所有的冲突连在一起,容易产生数据“堆积”,即:不同关键码占据了可利用的空位置,使得寻找某关键 码的位置需要许多次比较,导致搜索效率降低。缓解的办法就是代码提到的负载因子。(除了线性探测还有二次探测)
负载因子
这里要引入一个名词是负载因子,和上面的哈希冲突有关。因为当为了减少哈希冲突的发生,我们必须控制负载因子,负载因子是除了空位置剩余的位置数量tatol和容量capacity的比值(如果比值越高那么发生哈希冲突的概率越高),一般以0.7为标准。
用tatol的原因是因为增加元素的时候只找存在状态,删除的状态虽然没有元素,但是会影响增加。
哈希结构的查找和删除数据
查找和增加的初步类似,都是先用哈希函数找数据地址,代码如下:
int FindHashSearch(pHashStruct phs,Type data)
{
int ret = HashCode(phs,data);
int pre = ret;
assert(phs);
while(phs->Dasa[ret].state != EXIST || strcmp(phs->Dasa[ret].data,data) != 0)
{ //这个循环只有当数据地址状态不为EXIST,并且要删除元素和地址元素相同
ret++;
if(ret == phs->capacity) //如果走到末尾就从初始位置开始
ret = 0;
if(pre == ret) //如果走了一圈还没找到,就返回0
return 0;
}
return 1;
}
删除数据和查找数据一样,既然能找到,那自然能删除,代码如下:
int PopHashSearch(pHashStruct phs,Type data)
{
int ret = HashCode(phs,data);
int pre = ret;
assert(phs);
while(phs->Dasa[ret].state != EXIST || strcmp(phs->Dasa[ret].data,data) != 0)
{ //这个循环只有当数据地址状态不为EXIST,并且要删除元素和地址元素相同
ret++;
if(ret == phs->capacity) //如果走到末尾就从初始位置开始
ret = 0;
if(pre == ret) //如果走了一圈还没找到,就返回0
return 0;
}
phs->Dasa[ret].state = DELETE; //将状态值为删除
phs->Size--;
return 1;
}
需要注意的是删除之后,虽然状态从存在变成了删除,但是原来的数据还在。
哈希结构的扩容
当负载因子达到一定值时,就要进行扩容,才能保证哈希冲突的低触发率。说到这里先看一下我所使用的哈希函数:
int StrToInt(const char * str) // 这就是将字符串转化为整型
{
unsigned int seed = 131; // 31 131 1313 13131 131313
unsigned int hash = 0;
while (*str )
{
hash = hash * seed + (*str++);
}
return (hash & 0x7FFFFFFF);
}
int HashCode(pHashStruct cur,Type data)
{
return cur->_STInt(data) % cur->capacity; //求哈希地址的时候将整型取模容量
}
由此可知,哈希函数由容量决定,扩容的话容量会发生变化,所以哈希函数也会变,不仅影响之后增加的数据,而且之前已经增加的数据哈希地址也需要重新赋值,不然查找的时候就出错了。代码如下:
void CheckCapacity(pHashStruct phs)
{
int i,place;
pHashStruct cur = phs;
int Capacity = cur->capacity;
DataState* newhash = NULL;
//1.创建新空间
newhash = (DataState*)malloc(sizeof(DataState)*cur->capacity*2);
if(NULL == newhash)
{
assert(0);
return;
}
cur->capacity = cur->capacity*2; //扩容大小为原来容量的两倍
cur->Size = 0; //下面要重新添加旧元素所以先将size置为0
for(i=0 ;i<cur->capacity ;i++)
newhash[i].state = EMPTY;
//2.拷贝旧空间
for(i=0 ;i<Capacity ;i++)
{
if(cur->Dasa[i].state != EXIST)
continue;
place = HashCode(cur,cur->Dasa[i].data); //新空间用新的容量
newhash[place].data = cur->Dasa[i].data;
newhash[place].state = EXIST;
cur->Size++;
}
//3.释放旧空间
free(cur->Dasa);
cur->Dasa = newhash;
}
扩容分为三步:
1.创建新空间
2.拷贝旧数据
3.释放旧空间
开散列
开散列和闭散列不同的是,闭散列在每个哈希地址上存的是数据,有别的相同哈希地址的数据来到时,就用探测的方法去找空位置将其添加进哈希结构。而开散列在每个哈希地址上存的是一个链表的头结点,当有新的相同哈希地址的数据到来时,只需要头插进入此地址的链表即可。
开散列哈希结构的定义和初始化函数
typedef int (*STINT)(int num);
typedef int OH_type;
typedef struct OpenList
{
OH_type data;
struct OpenList* next;
}OpenList,*pOpenList;
typedef struct OpenHash
{
pOpenList* _openlist; //一个指针数组,保存链表的头结点
int size;
int capacity;
STINT _STInt;
}OpenHash,*pOpenHash;
初始化函数注意,需要给链表的头指针数组开辟动态内存空间:
void InitOpenHash(pOpenHash oph,STINT stint)
{
int i;
assert(oph);
oph->capacity = 10;
oph->size = 0;
oph->_STInt = stint;
oph->_openlist = (pOpenList*)malloc(sizeof(pOpenList)*oph->capacity);
for(i=0 ;i<oph->capacity ;i++)
oph->_openlist[i] = NULL;
}
开散列哈希结构的增加、删除和查找数据
void InsertOpenHash(pOpenHash oph,OH_type d)
{
pOpenList cur = NULL;
int place = HashCode(oph,d);
assert(oph);
if(oph->size == oph->capacity) //判断是否需要扩容
CheckCapacity(oph);
cur = oph->_openlist[place];
while(cur)
{
if(d == cur->data)
return;
cur = cur->next;
}
cur = BuyOpenHash(d);
cur->next = oph->_openlist[place];
oph->_openlist[place] = cur;
oph->size++;
}
开散列判断是否需要扩容没有负载因子,因为它没有探测。
int DeleteOpenHash(pOpenHash oph,OH_type d)
{
pOpenList del = NULL;
pOpenList pre = NULL;
int place = HashCode(oph,d);
assert(oph);
del = oph->_openlist[place];
pre = del;
if(del->next == NULL)
{
if(del->data != d)
return 0;
oph->_openlist[place] = NULL;
free(del);
del = NULL;
oph->size--;
return 1;
}
while(del->next != NULL)
{
if(del->data == d)
{
pre->next = del->next;
free(del);
del = NULL;
oph->size--;
return 1;
}
pre = del;
del = del->next;
}
return 0;
}
删除的时候注意判断一下是否需要改变链表的头指针。
pOpenList FindOpenHash(pOpenHash oph,OH_type d)
{
pOpenList cur = NULL;
int place = HashCode(oph,d);
assert(oph);
cur = oph->_openlist[place];
while(cur)
{
if(cur->data == d)
return cur;
cur = cur->next;
}
return NULL;
}
开散列哈希结构的扩容
类似闭散列,需要注意的是重新赋值可以和释放旧空间同时进行。
void CheckCapacity(pOpenHash oph)
{
pOpenList* newlist = NULL;
int i,place;
pOpenList cur = NULL;
pOpenList del = NULL;
int newcapacity = oph->capacity;
oph->capacity = oph->capacity*2;
newlist = (pOpenList*)malloc(sizeof(pOpenList)*oph->capacity);
if(NULL == newlist)
{
assert(0);
return;
}
for(i=0 ;i<oph->capacity ;i++)
newlist[i] = NULL;
for(i=0 ;i<newcapacity ;i++)
{
cur = oph->_openlist[i];
while(cur)
{
del = cur;
place = HashCode(oph,cur->data);
BuyOpenHash(cur->data)->next = newlist[place];
newlist[place] = BuyOpenHash(cur->data);
cur = cur->next;
free(del);
del = NULL;
}
}
oph->_openlist = newlist;
}

















 1233
1233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









