







google 了大多数都没用什么 rc.local 什么环境不说明。。。
follow me step by step
- 设置virtualbox ubuntu虚拟机共享文件夹

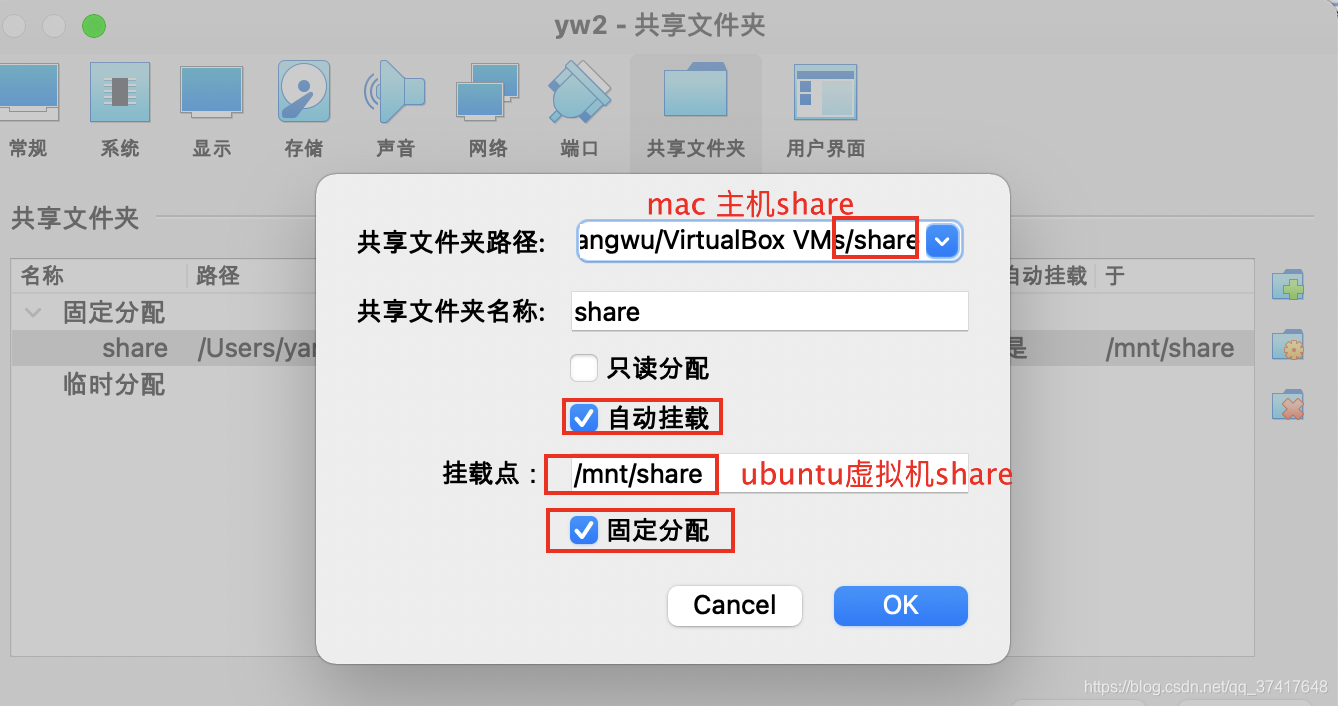
- 进入ubuntu先手动设置挂载点
创建共享文件并修改权限
mkdir /mnt/share
chmod 777 /mnt/share
挂载mac share 到虚拟机 /mnt/share
mount -t vboxsf share /mnt/share
自动挂载避免重启后失效
在 /etc/fstab 最后添加一行
share /mnt/share vboxsf rw 0 3

















 1083
1083

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









