




 Grid R-CNN是一种两阶段目标检测方法,它通过RoI特征对物体网格进行提案位置修正,提高定位精度。采用多点监督解决关键点定位不精确问题,使用像素级sigmoid激活的heatmap预测,并通过特征融合增强信息。通过extended region mapping增加有效训练样本,提升检测性能。
Grid R-CNN是一种两阶段目标检测方法,它通过RoI特征对物体网格进行提案位置修正,提高定位精度。采用多点监督解决关键点定位不精确问题,使用像素级sigmoid激活的heatmap预测,并通过特征融合增强信息。通过extended region mapping增加有效训练样本,提升检测性能。
Grid R-CNN
CornerNet是one-stage的基于关键点的detector,那么可以不可以在two-stage上用上类似的方法呢?Grid R-CNN就是这样的方法。和普通的two-stage的第二步对RoI进行回归不一样,该方法直接利用RoI feature对物体的Grid(多个关键点)进行proposal的位置修正。

和CornerNet一样,本文也发现了很多关键点(比如CornerNet中的左上和右下角点)所在的位置缺少local visual evidence的问题,所以本文设计了一种multi-point的监督方式,可以减小某些点定位不精确带来的影响。比如上图(b)中3x3的grid设计,右上角的不精确的y轴坐标可以由上中点校准,其实这和corner pooling的想法还是很相似的。
和CornerNet不一样的地方在于,CornerNet是一个bottom-up的方法,直接从图片得到关键点,然后对关键点进行group来确定物体的bounding box。而本文的方法是top-down的,先由第一阶段确定好每个instance的RoI,然后致力于将关键点定位得更加准确。
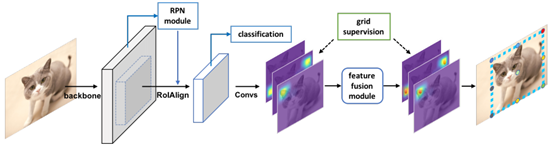
从上面的结构图看出,如果设置的Grid是NxN的,那么每个RoI的feature在经过dilated卷积和反卷积之后会输出
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 747
747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









