




 本文探讨如何通过multi-agent policy gradient方法改进场景图生成,关注hub node的识别,以提升scene graph的质量。文章提出counterfactual critic多智能体训练策略,通过最大化graph-level指标如Recall和SPICE,优化物体检测和关系识别。
本文探讨如何通过multi-agent policy gradient方法改进场景图生成,关注hub node的识别,以提升scene graph的质量。文章提出counterfactual critic多智能体训练策略,通过最大化graph-level指标如Recall和SPICE,优化物体检测和关系识别。
Scene Dynamics
文章
我之前一直想着要提高scene graph的质量,最重要的应该是提高对关系的识别能力,也就是提高predcls任务的效果,但是本文提醒了我,把对目标的识别和和关系的识别结合起来,也能有效提高scene graph的质量。
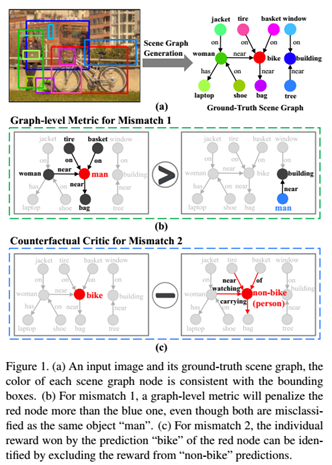
本文认为,目前的关系检测算法大都没有将目标的检测放在graph的层次上思考,message passing算是一个,但还是没有充分利用graph的特性。对于目标的识别,现有的算法都是使用每个object的crossentropy之和作为损失函数,但问题在于这样是认为每个object的重要性是一样的,其实不是的。比如我们看上图b,将bike错误地判断为man会导致之后的4个关系的识别都出错,而将tree错判为man,只会影响1个关系,作者将图中bike这样对sg影响大的object叫做hub node,而对于tree那样的叫做non-hub node。
为了应对上面所说的这种情况,我的一个直接想法是在训练集中对每种物体的关系进行统计,找到那些hub node,然后构建损失函数的时候,给它们更大的权重。但本文不是这样简单地的做的,文章采用graph-level的metric来对检测结果进行评价,如Recall和SPICE,

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3461
3461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









