






前言
uboot.lds
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
OUTPUT_ARCH(arm)
ENTRY(_start) //声明执行文件的入口地址,也是把_start放到0地址开始,一般是向量表
SECTIONS
{
. = 0x00000000; //'.'是location counter,记录当前地址
. = ALIGN(4); //4字节对齐
.text : //代码段
{
*(.__image_copy_start) //用于辅助代码重定位,整个section size = 0
*(.vectors) //中断向量表,位置执行文件0地址起始处
arch/arm/cpu/armv7/start.o (.text*) //包含reset和初始化等函数
*(.text*) //代码段
}
. = ALIGN(4);
.rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) } //包含所有rodata
. = ALIGN(4);
.data : {
*(.data*)
}
. = ALIGN(4);
. = .;
. = ALIGN(4);
.u_boot_list : {
KEEP(*(SORT(.u_boot_list*))); //注册的uboot命令放在此段,KEEP关键字表示要链接到执行文件,
//SORT表示排序
}
. = ALIGN(4);
.image_copy_end :
{
*(.__image_copy_end)
}
.rel_dyn_start :
{
*(.__rel_dyn_start)
}
.rel.dyn : {
*(.rel*)
}
.rel_dyn_end :
{
*(.__rel_dyn_end)
}
.end :
{
*(.__end)
}
_image_binary_end = .;
. = ALIGN(4096);
.mmutable : {
*(.mmutable)
}
.bss_start __rel_dyn_start (OVERLAY) : {
KEEP(*(.__bss_start));
__bss_base = .;
}
.bss __bss_base (OVERLAY) : {
*(.bss*)
. = ALIGN(4);
__bss_limit = .;
}
.bss_end __bss_limit (OVERLAY) : {
KEEP(*(.__bss_end));
}
.dynsym _image_binary_end : { *(.dynsym) }
.dynbss : { *(.dynbss) }
.dynstr : { *(.dynstr*) }
.dynamic : { *(.dynamic*) }
.plt : { *(.plt*) }
.interp : { *(.interp*) }
.gnu.hash : { *(.gnu.hash) }
.gnu : { *(.gnu*) }
.ARM.exidx : { *(.ARM.exidx*) }
.gnu.linkonce.armexidx : { *(.gnu.linkonce.armexidx.*) }
}
- __image_copy_start,__image_copy_end
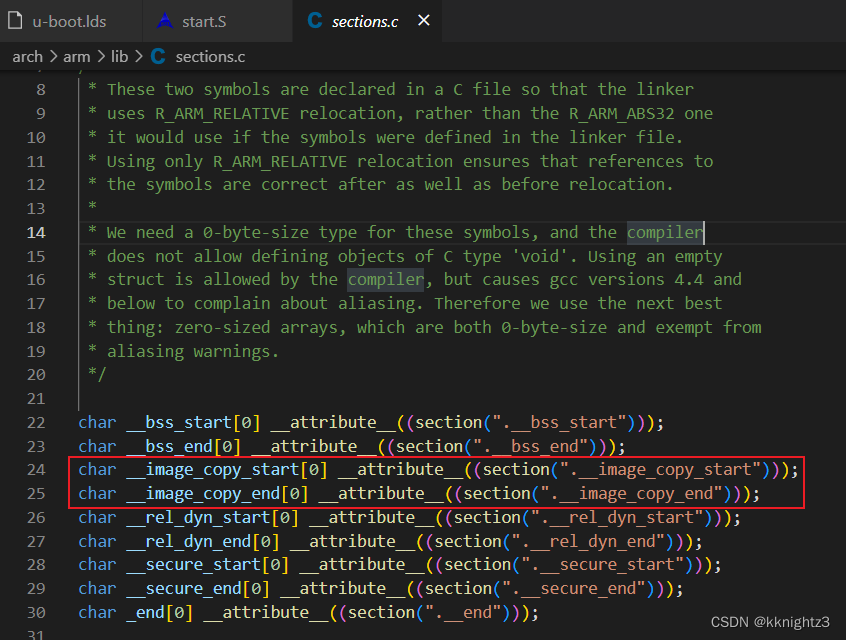
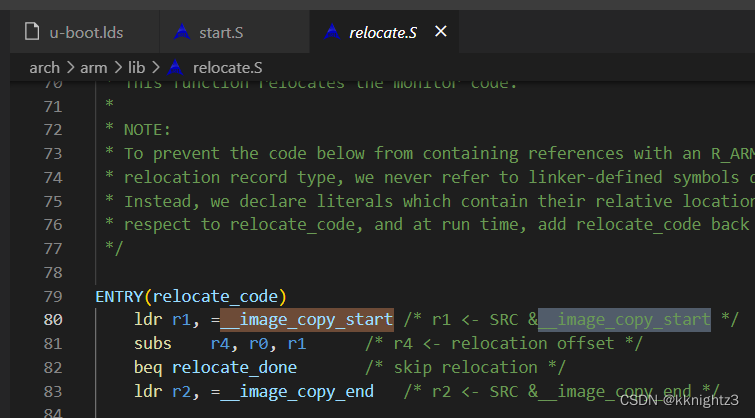
仅在__image_copy_start 段和__image_copy_end段都放置了一个 char[0]数据,大小为空,查看代码可知,符号 __image_copy_start和 __image_copy_end仅用于代码重定位使用。
- .vectors
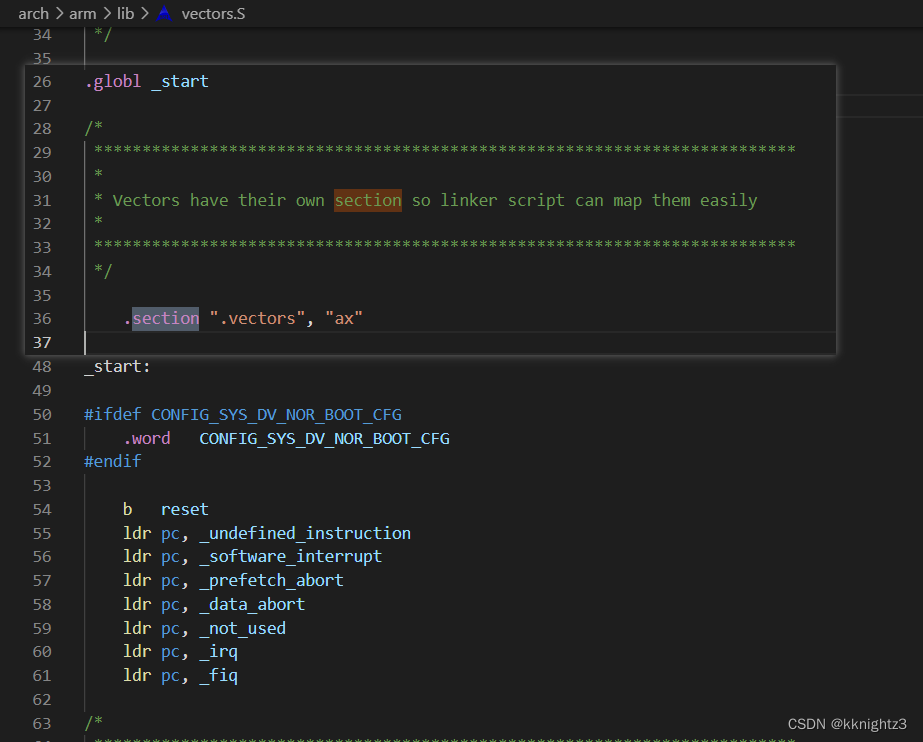
在vector.s文件的头部定义了section vector字段,即把随后的 _start代码段放入了vector段,同时也就把_start(中断向量表)定义到了执行文件的0字节处
uboot启动流程
uboot启动详细的代码调用流程
u-boot:启动详细的代码调用流程
u-boot.lds:(arch/arm/cpu/u-boot.lds)
|-->_start:(arch/arm/lib/vectors.S)
|-->reset(arch/arm/cpu/armv7/start.S)
|-->save_boot_params(arch/arm/cpu/armv7/start.S)/*将引导参数保存到内存中*/
|-->save_boot_params_ret(arch/arm/cpu/armv7/start.S)
|-->cpu_init_cp15(arch/arm/cpu/armv7/start.S)/*初始化*/
|-->cpu_init_crit(arch/arm/cpu/armv7/start.S)
|-->lowlevel_init(arch/arm/cpu/armv7/lowlevel_init.S)
|-->_main(arch/arm/lib/crt0.S)
|-->board_init_f_alloc_reserve(common/init/board_init.c)/*为u-boot的gd结构体分配空间*/
|-->board_init_f_init_reserve(common/init/board_init.c) /*将gd结构体清零*/
|-->board_init_f(common/board_f.c)
|-->initcall_run_list(include/initcall.h) /*初始化序列函数*/
|-->init_sequence_f[](common/board_f.c) /* 初始化序列函数数组 */
|-->board_early_init_f(board/freescale/mx6ull_toto/mx6ull_toto.c)/*初始化串口的IO配置*/
|-->timer_init(arch/arm/imx-common/timer.c) /*初始化内核定时器,为uboot提供时钟节拍*/
|-->init_baud_rate(common/board_f.c) /*初始化波特率*/
|-->serial_init(drivers/serial/serial.c) /*初始化串口通信设置*/
|-->console_init_f(common/console.c) /*初始化控制台*/
|-->...
|-->relocate_code(arch/arm/lib/relocate.S) /*主要完成镜像拷贝和重定位*/
|-->relocate_vectors(arch/arm/lib/relocate.S)/*重定位向量表*/
|-->board_init_r(common/board_r.c)/*板级初始化*/
|-->initcall_run_list(include/initcall.h)/*初始化序列函数*/
|-->init_sequence_r[](common/board_f.c)/*序列函数*/
|-->initr_reloc(common/board_r.c) /*设置 gd->flags,标记重定位完成*/
|-->serial_initialize(drivers/serial/serial-uclass.c)/*初始化串口*/
|-->serial_init(drivers/serial/serial-uclass.c) /*初始化串口*/
|-->initr_mmc(common/board_r.c) /*初始化emmc*/
|-->mmc_initialize(drivers/mmc/mmc.c)
|-->mmc_do_preinit(drivers/mmc/mmc.c)
|-->mmc_start_init(drivers/mmc/mmc.c)
|-->console_init_r(common/console.c) /*初始化控制台*/
|-->interrupt_init(arch/arm/lib/interrupts.c) /*初始化中断*/
|-->initr_net(common/board_r.c) /*初始化网络设备*/
|-->eth_initialize(net/eth-uclass.c)
|-->eth_common_init(net/eth_common.c)
|-->phy_init(drivers/net/phy/phy.c)
|-->uclass_first_device_check(drivers/core/uclass.c)
|-->uclass_find_first_device(drivers/core/uclass.c)
|-->device_probe(drivers/core/device.c)
|-->device_of_to_plat(drivers/core/device.c)
|-->drv->of_to_plat
|-->fecmxc_of_to_plat(drivers/net/fec_mxc.c)/*解析设备树信息*/
|-->device_get_uclass_id(drivers/core/device.c)
|-->uclass_pre_probe_device(drivers/core/uclass.c)
|-->drv->probe(dev)
/*drivers/net/fec_mxc.c*/
U_BOOT_DRIVER(fecmxc_gem) = {
.name = "fecmxc",
.id = UCLASS_ETH,
.of_match = fecmxc_ids,
.of_to_plat = fecmxc_of_to_plat,
.probe = fecmxc_probe,
.remove = fecmxc_remove,
.ops = &fecmxc_ops,
.priv_auto = sizeof(struct fec_priv),
.plat_auto = sizeof(struct eth_pdata),
};
|-->fecmxc_probe(drivers/net/fec_mxc.c)/*探测和初始化*/
|-->fec_get_miibus(drivers/net/fec_mxc.c)
|-->mdio_alloc(drivers/net/fec_mxc.c)
|-->bus->read = fec_phy_read;
|-->bus->write = fec_phy_write;
|-->mdio_register(common/miiphyutil.c)
|-->fec_mii_setspeed(drivers/net/fec_mxc.c)
|-->fec_phy_init(drivers/net/fec_mxc.c)
|-->device_get_phy_addr(drivers/net/fec_mxc.c)
|-->phy_connect(drivers/net/phy/phy.c)
|-->phy_find_by_mask(drivers/net/phy/phy.c)
|-->bus->reset(bus)
|-->get_phy_device_by_mask(drivers/net/phy/phy.c)
|-->create_phy_by_mask(drivers/net/phy/phy.c)
|-->phy_device_create(drivers/net/phy/phy.c)
|-->phy_probe(drivers/net/phy/phy.c)
|-->phy_connect_dev(drivers/net/phy/phy.c)
|-->phy_reset(drivers/net/phy/phy.c)
|-->phy_config(drivers/net/phy/phy.c)
|-->board_phy_config(drivers/net/phy/phy.c)
|-->phydev->drv->config(phydev)
/*drivers/net/phy/smsc.c*/
static struct phy_driver lan8710_driver = {
.name = "SMSC LAN8710/LAN8720",
.uid = 0x0007c0f0,
.mask = 0xffff0,
.features = PHY_BASIC_FEATURES,
.config = &genphy_config_aneg,
.startup = &genphy_startup,
.shutdown = &genphy_shutdown,
};
|-->genphy_config_aneg(drivers/net/phy/phy.c)
|-->phy_reset(需要手动调用)(drivers/net/phy/phy.c)
|-->genphy_setup_forced(drivers/net/phy/phy.c)
|-->genphy_config_advert(drivers/net/phy/phy.c)
|-->genphy_restart_aneg(drivers/net/phy/phy.c)
|-->uclass_post_probe_device(drivers/core/uclass.c)
|-->uc_drv->post_probe(drivers/core/uclass.c)
/*net/eth-uclass.c*/
UCLASS_DRIVER(ethernet) = {
.name = "ethernet",
.id = UCLASS_ETH,
.post_bind = eth_post_bind,
.pre_unbind = eth_pre_unbind,
.post_probe = eth_post_probe,
.pre_remove = eth_pre_remove,
.priv_auto = sizeof(struct eth_uclass_priv),
.per_device_auto = sizeof(struct eth_device_priv),
.flags = DM_UC_FLAG_SEQ_ALIAS,
};
|-->eth_post_probe(net/eth-uclass.c)
|-->eth_write_hwaddr(drivers/core/uclass.c)
|-->...
|-->run_main_loop(common/board_r.c)/*主循环,处理命令*/
|-->main_loop(common/main.c)
|-->bootdelay_process(common/autoboot.c) /*读取环境变量bootdelay和bootcmd的内容*/
|-->autoboot_command(common/autoboot.c) /*倒计时按下执行,没有操作执行bootcmd的参数*/
|-->abortboot(common/autoboot.c)
|-->printf("Hit any key to stop autoboot: %2d ", bootdelay);
/*到这里就是我们看到uboot延时3s启动内核的地方*/
|-->cli_loop(common/cli.c) /*倒计时按下space键,执行用户输入命令*/
参考资料
https://zhuanlan.zhihu.com/p/633773454


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









