







 本文介绍了一种基于KDTree的点云外包盒提取方法,利用RandLA-Net框架处理点云数据,通过递归聚类算法提取目标外包盒并去除误判点云,最终展示效果。适用于点云数据处理、三维重建等领域。
本文介绍了一种基于KDTree的点云外包盒提取方法,利用RandLA-Net框架处理点云数据,通过递归聚类算法提取目标外包盒并去除误判点云,最终展示效果。适用于点云数据处理、三维重建等领域。
解决问题
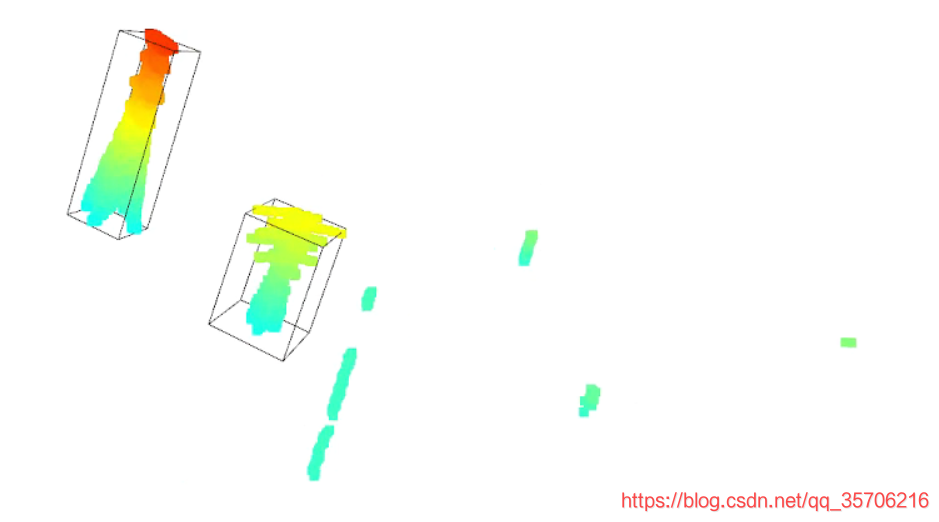
使用 RandLA-Net 框架得到结果,从中提取目标外包盒,并去除误判的点云块。
参考方法
链接: link
代码
Ubuntu环境,代码是基于RandLA-Net 代码片.
from helper_ply import read_ply # 函数来自RandLA-Net
from collections import Counter
from sklearn.neighbors import KDTree
from helper_tool import DataProcessing as DP # 函数来自RandLA-Net
from sklearn.cluster import KMeans
import cv2
import open3d
import numpy as np
from open3d import read_point_cloud
def tow_array_sorted(label, xyz_coordinate):
# 根据label值排序
sorted_indices = label.argsort() # 排序索引
xyz_sorted = xyz_coordinate[sorted_indices]
list_numbers = Counter(label) # {0.0: 40942368, 1.0: 60380, 4.0: 46125, 3.0: 26614, 2.0: 7047}
return xyz_sorted, list_numbers
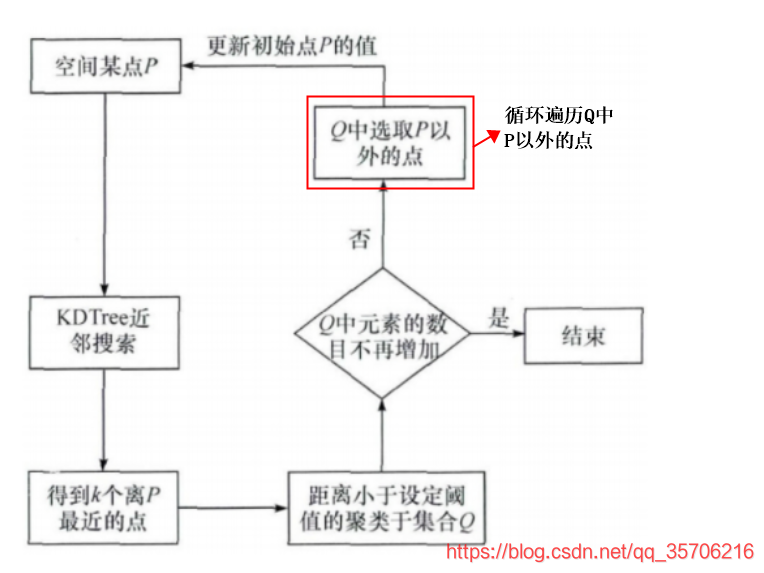
def KDtreeRecursion(xyz, P_vector=[], Q_vector=None, kdtree_k=80, kdtree_distance_max=15.0):
'''
基于KDTree的递归聚类点云
xyz: 输入点云
P_vector: 已经用KDTree搜索过的点的索引组成的向量
Q_vector:已经聚类到一起的点索引
kdtree_k: KDTree搜索点个个数
kdtree_distance_max: 距离阈值
:return: Q_vector
'''
global Q_vector1
tree = KDTree(xyz)
if Q_vector is None: # 第一次Q_vector为空,需要赋值
xyz_distance_indices = tree.query(xyz[:1], k=kdtree_k)
Q_vector = xyz_distance_indices[1][np.where(xyz_distance_indices[0] < kdtree_distance_max)]
in_Q_out_P = np.array(list(set(Q_vector) - set(P_vector))) # 得到在Q集合,不在P集合的点索引
Q_vector_add = Q_vector
for indx in in_Q_out_P: # 遍历所有点 # ##################
P_vector = np.append(P_vector, indx)
xyz_distance_indices = tree.query(xyz[indx:indx+1], k=kdtree_k)
Q_vector_new = xyz_distance_indices[1][np.where( xyz_distance_indices[0] < kdtree_distance_max)]
Q_vector_add = np.unique(np.append(Q_vector_add, Q_vector_new))
if len(Q_vector_add) != len(Q_vector): # 判断是否递归
Q_vector = Q_vector_add
KDtreeRecursion(xyz, P_vector, Q_vector)
else:
Q_vector1 = Q_vector
# print('长度:', xyz.shape, len(np.unique(Q_vector)))
return Q_vector1
def rectrangle_pcd(xyz):
'''
根据坐标值绘制长方体
:return:
'''
rectrangle_points = np.empty([8,3], dtype=int)
ind = 0
for i in range(2):
for j in range(2):
for k in range(2):
point = [xyz[:,0][i],xyz[:,1][j],xyz[:,2][k]]
rectrangle_points[ind,:] = point
ind = ind + 1
lines = [[0, 1], [1, 3], [3, 2],[2, 0], [4, 5], [5, 7],[7, 6], [6, 4], [0, 4],[1, 5], [2, 6], [3, 7]] # Right leg
colors = [[0, 0, 0] for i in range(len(lines))] # Default blue
# 定义三角形三条连接线
line_pcd = open3d.LineSet()
line_pcd.lines = open3d.Vector2iVector(lines)
line_pcd.colors = open3d.Vector3dVector(colors)
line_pcd.points = open3d.Vector3dVector(rectrangle_points)
return line_pcd
# 读取ply点云
ply_file_path = "/root/results/Area_4_*_1.ply"
ply_points = read_ply(ply_file_path)
xyz = np.vstack((ply_points['x'], ply_points['y'], ply_points['z'])).T
predict_class = ply_points['class'].astype(int)
xyz_sorted, list_numbers = tow_array_sorted(predict_class, xyz)
unique_class = np.unique(predict_class)
pcd = []
Q_vector1 = None
for i in range(2):
print(i, '\t', list_numbers[i])
if i == 0:
temp_number = list_numbers[i]
continue
else:
temp_xyz = xyz_sorted[temp_number:, :]
temp_xyz = DP.grid_sub_sampling(points=temp_xyz, grid_size=0.16)
print(len(temp_xyz))
# KDTree
tree = KDTree(temp_xyz)
while len(temp_xyz)>100:
xyz_indx = KDtreeRecursion(temp_xyz)
xyz = temp_xyz[xyz_indx]
temp_xyz = np.delete(temp_xyz, xyz_indx, axis=0)
if len(xyz_indx)>800:
xyz_max = np.max(xyz, axis=0)
xyz_min = np.min(xyz, axis=0)
min_max_xyz = np.array([xyz_min, xyz_max])
line_pcd = rectrangle_pcd(min_max_xyz)
pcd.append(line_pcd)
# 方法1(非阻塞显示)
ply_file_path1 = "/root/results/*.ply"
point_pcd = read_point_cloud(ply_file_path1)
vis = open3d.Visualizer()
vis.create_window(window_name='Open3D_1')
vis.get_render_option().point_size = 10 # 设置点的大小
# 先把点云对象添加给Visualizer
vis.add_geometry(point_pcd)
for i in range(len(pcd)):
vis.add_geometry(pcd[i])
while True:
vis.poll_events()
vis.update_renderer()
cv2.waitKey(100)
效果图


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









