







 超级会员免费看
超级会员免费看
- 🍅 我是蚂蚁小兵,专注于车载诊断领域,尤其擅长于对CANoe工具的使用
- 🍅 寻找组织 ,答疑解惑,摸鱼聊天,博客源码,点击加入👉【相亲相爱一家人】
- 🍅 玩转CANoe,博客目录大全,点击跳转👉
📘前言
🍅 需求如下:
1、网络处于睡眠状态,运行CANoe
2、通过本地唤醒条件,唤醒网络
3、等待Repeat Message Timer超时后确认DUT进入Normal Operation State
4、停止本地唤醒条件条件
5、DUT满足本地睡眠条件后进入Ready Sleep State(停止发送NM报文,应用报文正常发送)

📙网络管理状态机
-
不同的项目网络管理状态机会有差异,下图仅供参考。
-
当ECU完成通信任务后,会从Normal Operation State状态进入Ready Sleep State(RSS)状态,作为进入睡眠模式前的过渡阶段,此时节点停止发送网络管理报文,但仍可接收报文,等待网络中其他节点同步释放资源.
-
DUT由两类方式进入RSS状态:
- NM_12 :处于RMS状态的节点,当
CANNM_REPEAT_MESSAGE_TIME超时,如果节点自身的网络请求已经结束,那么该节点应该进入RSS状态。 - NM_11 :处于NOS状态的节点,如果所有唤醒事件结束,也不再需要请求任何网络,那么它必须立即将网络管理状态切换到RSS状态。
- NM_13 :当节点处于RSS状态时,如果继续NM唤醒报文,DUT必须重置NM-Timeout Timer超时计时器,节点的网络管理状态必须继续维持在RSS状态。
- NM_12 :处于RMS状态的节点,当
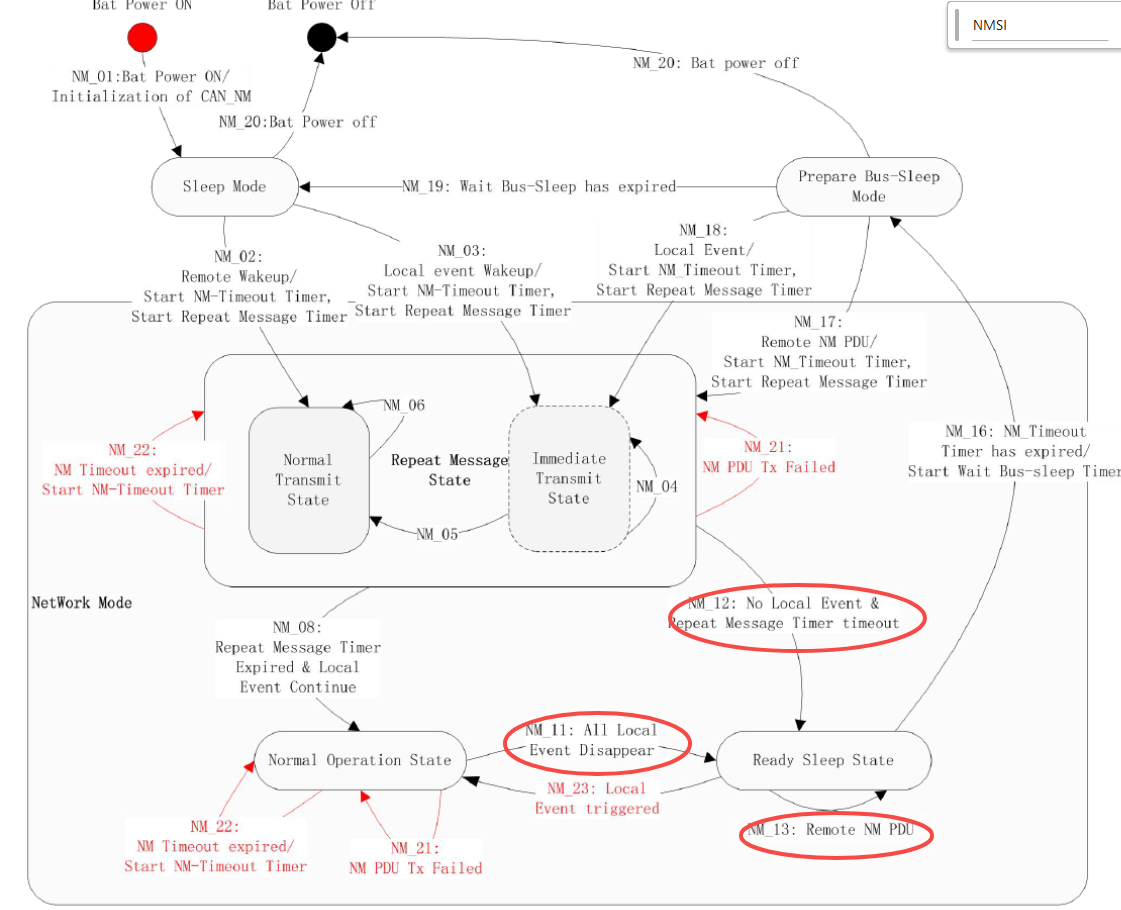
- DUT处于RSS阶段时,如果没有收到NM唤醒报文时,将不发送NM报文,只发送APP报文。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1682
1682

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











