






通常在相机标定和计算相机之间的相对运动时,我们选择一个相机作为基准(通常是第一个相机),而其他相机的坐标系则是相对于基准相机的坐标系进行变换的。
假设我们有第一个相机 C1,它的相机矩阵为:
其中 K 是内部参数矩阵,I0 表示单位旋转矩阵和零平移向量。
对于其他相机 Ci,我们可以通过相对于基准相机(把他当作世界坐标系原点,(还有一种是标定板上左上角第一个点为世界坐标原点,物体每转一次测一个相机的外参))的旋转矩阵 R i1
和平移向量 t i1 来描述其相机矩阵
这里,R i1 和 t i1 描述了将第一个相机的坐标系变换到第 i 个相机的坐标系所需的旋转和平移。
通过计算基本矩阵或本质矩阵,我们可以获取相机之间的相对运动关系,并以第一个相机为基准,描述其他相机的相机矩阵。这样,整个相机系统的几何关系就被描述为相对于基准相机的相对运动。这在立体视觉、三维重建等应用中是常见的做法。
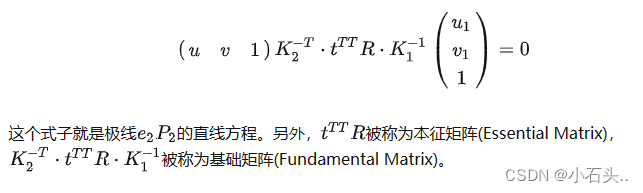
K2,K1分别为两个相机的内参,由于第一个相机的外参前面说了是基准,通过标定得到了相机的外参可以计算出另一个相机内参
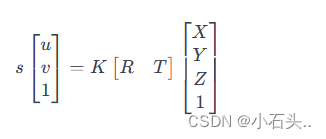
其实通过一张图像如下公式(一个棋盘格有多个点解方程得到内外参这两个未知解)就能获得内外参,用多张可以提高鲁棒性,有利于矫正畸变等等,这里的外参是相当于棋盘格左上角为世界坐标原点。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









