






[软件名称]: B612咔叽 v14.3.60 安卓版
[软件大小]: 210.6 MB
[下载通道]: 夸克盘 | 迅雷盘
软件介绍
B612咔叽 v14.3.60 修订版技术简报
一、产品定位
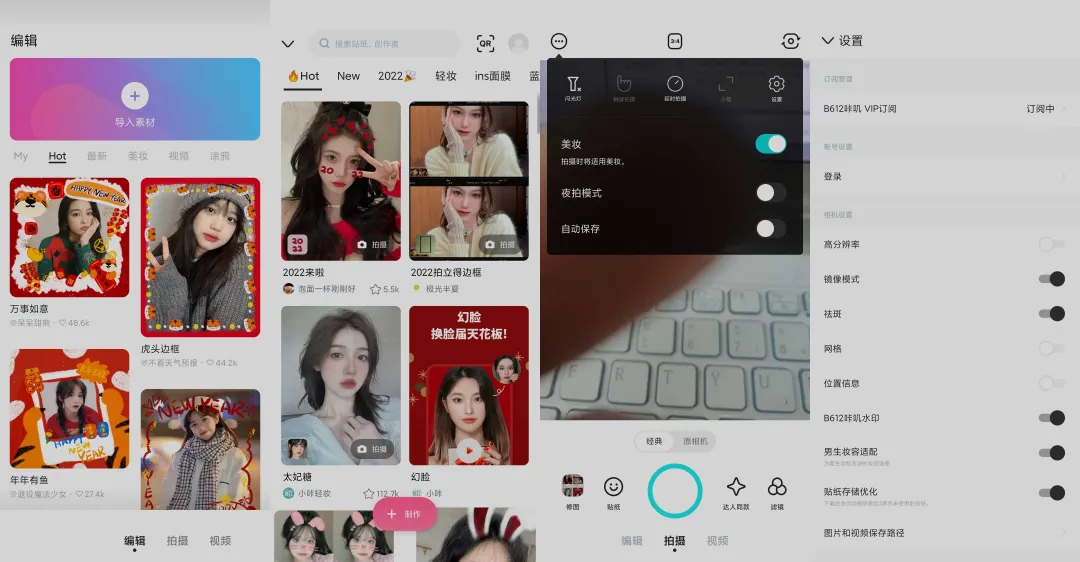
B612咔叽系一款面向移动端的影像处理应用,集成 B612 与 SNOW 双滤镜体系,涵盖实时美颜、专业调色及后期编辑功能,适用于日常自拍、夜景、风光等多场景拍摄。
二、核心功能
双摄级滤镜库
内置两组独立算法,可在同一场景下叠加使用,实现肤色柔化、背景虚化及光影重塑。
专业参数调节
支持色温、对比度、饱和度、锐度等十余项手动微调,满足高阶用户精细化需求。
视频短片录制
最高支持 4K30 帧录制,并可在录制过程中实时套用滤镜与美颜。
三、修订内容
• 解锁全部 VIP 订阅权益,无需登录即可调用高级滤镜与特效。
• 移除启动广告与版本更新提示,保持界面纯净。
• 针对华为设备完成兼容性适配,确保鸿蒙系统稳定运行。
软件截图
资源下载地址
以下哪个网盘都可以,资源一样
1、夸克网盘
https://pan.quark.cn/s/f0714a6fe46a
2、迅雷网盘
https://pan.xunlei.com/s/VOWEDptL64jeCxT2sxrrSYbnA1?pwd=y6ap#


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









