






1.TP、TN、FP、FN
\qquad
T、F表示待分类目标的GT值
\qquad
P、N表示预测到目标的正反例
 在目标检测类任务中:
在目标检测类任务中:
\qquad
TP:表示正确检测到待检测目标
\qquad
TN:表示没有检测到待检测目标
\qquad
FP:表示预测到了非检测目标
\qquad
FN:表示没有检测到非监测目标(没有目标也没有检测到目标)
\qquad
参考链接:https://blog.youkuaiyun.com/dongjinkun/article/details/109899733’
2.精确率(Precision)、召回率(Recall)、准确率(Accuracy)
\qquad
原文链接:https://blog.youkuaiyun.com/littlehaes/article/details/83278256
\qquad
准确率(Accuracy):这三个指标里最直观的就是准确率: 模型判断正确的数据(TP+TN)占总数据的比例

\qquad 召回率(Recall): 针对数据集中的所有正例(TP+FN)而言,模型正确判断出的正例(TP)占数据集中所有正例的比例.FN表示被模型误认为是负例但实际是正例的数据.召回率也叫查全率,以物体检测为例,我们往往把图片中的物体作为正例,此时召回率高代表着模型可以找出图片中更多的物体!

\qquad 精确率(Precision):针对模型判断出的所有正例(TP+FP)而言,其中真正例(TP)占的比例.精确率也叫查准率,还是以物体检测为例,精确率高表示模型检测出的物体中大部分确实是物体,只有少量不是物体的对象被当成物体

\qquad
区分好召回率和精确率的关键在于:针对的数据不同,召回率针对的是数据集中的所有正例,精确率针对的是模型判断出的所有正例
3.角度误差
\qquad
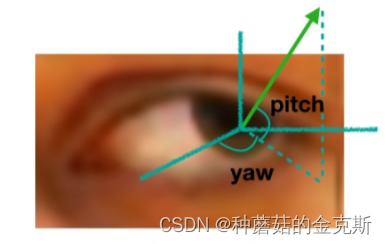
在模型估计出 pitch 角和 yaw 角之后,可以计算出代表视线方向的三维向量,该向量与真实的方向向量(ground truth)之间的夹角即是 gaze 领域最常用的评价指标。
\qquad
图片链接:https://blog.youkuaiyun.com/c9Yv2cf9I06K2A9E/article/details/105400845
4.PR曲线、AUC指标
\qquad
参考链接:https://blog.youkuaiyun.com/weixin_37817275/article/details/115859550
\qquad
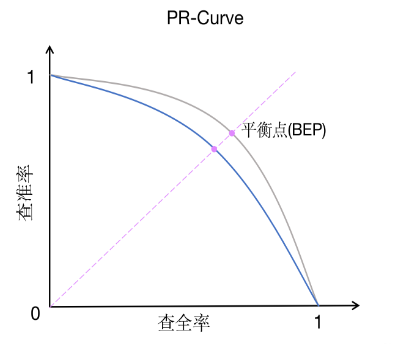
PR曲线中的P代表的是precision(精准率),R代表的是recall(召回率),其代表的是精准率与召回率的关系,一般情况下,将recall设置为横坐标,precision设置为纵坐标。
\qquad
1. 如果一条曲线完全“包住”另一条曲线,则前者性能优于另一条曲线。
\qquad
2. PR曲线发生了交叉时:以PR曲线下的面积作为衡量指标,但这个指标通常难以计算。
\qquad
3. 使用 “平衡点”(Break-Even Point),他是查准率=查全率时的取值,值越大代表效果越优
5.ROC
\qquad
更多详细介绍参考链接:https://blog.youkuaiyun.com/weixin_37817275/article/details/115859550
\qquad
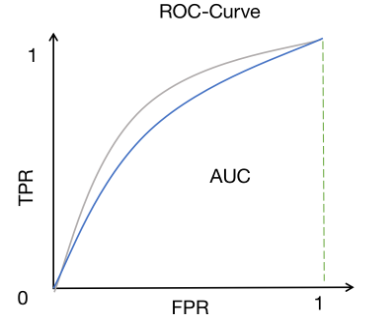
ROC曲线的横坐标为FPR,纵坐标为TPR
\qquad
1.将预测结果按照预测为正类概率值排序
\qquad
2.将阈值由1开始逐渐降低,按此顺序逐个把样本作为正例进行预测,每次可以计算出当前的FPR,TPR值
\qquad
3.以TPR为纵坐标,FPR为横坐标绘制图像
\qquad
ROC曲线下的面积(AUC)作为衡量指标,面积越大,性能越好。该指标经常被用来评价注视目标估计网络的性能。
6.欧氏距离(Dist.)
\qquad
最常见的两点之间或多点之间的距离表示法,又称之为欧几里得度量,它定义于欧几里得空间中,如点
x
=
(
x
1
,
.
.
.
,
x
n
)
x = ({x_1},...,{x_n})
x=(x1,...,xn)和
y
=
(
y
1
,
.
.
.
,
y
n
)
y = ({y_1},...,{y_n})
y=(y1,...,yn)之间的距离为:
d
(
x
,
y
)
=
(
x
1
−
y
1
)
2
+
(
x
2
−
y
2
)
2
+
…
+
(
x
n
−
y
n
)
2
=
∑
i
=
1
n
(
x
i
−
y
i
)
2
d(x,y) = \sqrt {{{\left( {{x_1} - {y_1}} \right)}^2} + {{\left( {{x_2} - {y_2}} \right)}^2} + \ldots + {{\left( {{x_n} - {y_n}} \right)}^2}} = \sqrt {\sum\limits_{i = 1}^n {{{\left( {{x_i} - {y_i}} \right)}^2}} }
d(x,y)=(x1−y1)2+(x2−y2)2+…+(xn−yn)2=i=1∑n(xi−yi)2
1.二维平面上两点
a
(
x
1
,
y
1
)
a({x_1},{y_1})
a(x1,y1)与
b
(
x
2
,
y
2
)
b({x_2},{y_2})
b(x2,y2)间的欧氏距离:
d
12
=
(
x
1
−
x
2
)
2
+
(
y
1
−
y
2
)
2
{{\rm{d}}_{12}} = \sqrt {{{\left( {{{\rm{x}}_1} - {{\rm{x}}_2}} \right)}^2} + {{\left( {{{\rm{y}}_1} - {{\rm{y}}_2}} \right)}^2}}
d12=(x1−x2)2+(y1−y2)2
2.两个n维向量
a
(
x
11
,
x
12
,
…
,
x
1
n
)
{\rm{a}}\left( {{{\rm{x}}_{11}},{{\rm{x}}_{12}}, \ldots ,{{\rm{x}}_{1{\rm{n}}}}} \right)
a(x11,x12,…,x1n)与
b
(
x
21
,
x
22
,
…
,
x
2
n
)
b\left( {{{\rm{x}}_{21}},{{\rm{x}}_{22}}, \ldots ,{{\rm{x}}_{{\rm{2n}}}}} \right)
b(x21,x22,…,x2n)间的距离:
d
12
=
∑
k
=
1
n
(
x
1
k
−
x
2
k
)
2
{{\rm{d}}_{12}} = \sqrt {\sum\limits_{{\rm{k}} = 1}^{\rm{n}} {{{\left( {{{\rm{x}}_{1{\rm{k}}}} - {{\rm{x}}_{2{\rm{k}}}}} \right)}^2}} }
d12=k=1∑n(x1k−x2k)2


















 1846
1846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











