






YOLOv10请移步
基于yolov10的路面裂缝检测数据集训练模型对比
YOLOv11请移步
基于yolov11的路面裂缝检测数据集训练模型对比
1.引言
YOLO(You Only Look Once)是一种流行的实时目标检测系统,以其快速准确的性能在众多应用领域中发挥着重要作用,如自动驾驶、视频监控和工业自动化。YOLO将目标检测视为回归问题,直接预测图像中的边界框和类别概率,实现端到端的训练,从而在保持高检测速度的同时达到满意的准确性[2-4]。随着技术的不断进步,YOLO系列经历了多个版本的迭代,每个新版本都在速度、准确性和计算效率上进行了优化和改进[1,4]。
2.YOLOv9概述
由于根据信息瓶颈原理,数据在经过转换时可能会引起信息损失,故导致网络在训练中使用信息(得到的输入信息)是不完整的,从而导致梯度不可靠,收敛性差。为解决深度神经网络存在收敛速度慢或收敛结果差的问题,YOLOv9以设计各种规范化和激活函数为前提,提出可编程梯度信息(Programmable Gradient Information,PGI)的新辅助监督框架。其包括主分支、辅助可逆分支、多级辅助信息三个部分[5-6]。
3.实验设计
本文将对比YOLOv9中YOLOv9-c与YOLOv9-e两个参数模型在同一数据集与同样轮数下的性能表现。
选择的数据集为河北工业大学开源,发表在Data in Brief期刊中的UAV-PDD2023数据集,其用于道路破损检测[7-8]。数据集包含2440张三通道JPG格式图像,以及对应的VOC格式标注文件,图像规格为2592×1944,图像中标记了六种类型。
表1 模型训练参数
| YOLOv9-c | YOLOv9-e | |
|---|---|---|
| 训练轮数(epochs) | 300 | 300 |
| 超参数(hyp) | YOLOv9 default | YOLOv9 default |
| 权重模型 | 无 | YOLOv9-e-converted.pt |
| 模型大小 | 98MB | 133MB |
4.实验结果
1.yolov9-c的混淆矩阵

2.yolov9-e的混淆矩阵

3.yolov9-c的F1值曲线
4.yolov9-e的F1值曲线

5.yolov9-c的Precision曲线

6.yolov9-e的Precision曲线

7.yolov9-c的PR曲线

8.yolov9-e的PR曲线

9.yolov9-c的Recall曲线

10.yolov9-e的Recall曲线

11.yolov9-c的标定参数可视化图
12.yolov9-e的标定参数可视化图
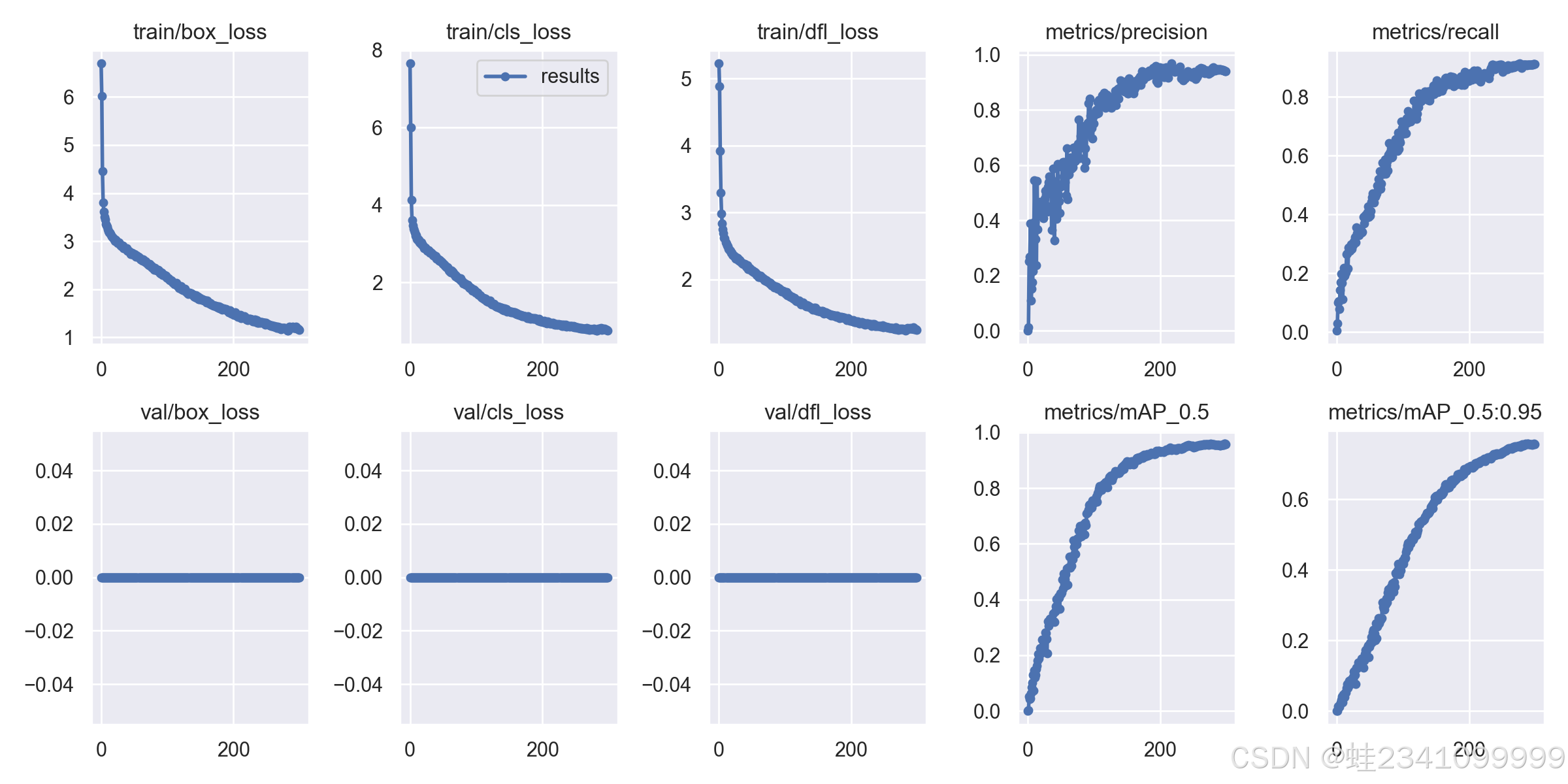
13.yolov9-c的训练参数可视化图

14.yolov9-e的训练参数可视化图
参考文献:
[1]Juan R. Terven, Diana M. Cordova-Esparza. A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS [J/OL]. (2024-01-07) [2024-11-06]. https://arxiv.org/html/2304.00501v6.
[2]【全面认知YOLO系列】引言部分:YOLO系列模型概述[EB/OL]. (2024-07-03) [2024-11-06]. https://blog.youkuaiyun.com/wcl291121957/article/details/137452402.
[3]极速目标追踪:YOLO(You Only Look Once)算法全解析[EB/OL]. (2024-06-28) [2024-11-06]. https://blog.youkuaiyun.com/2401_85760095/article/details/140055036.
[4]必读综述!YOLO十年之约:从起源到YOLOv10[EB/OL]. (2024-07-18) [2024-11-06]. https://www.bilibili.com/read/cv36183194/.
[5]Chien-Yao Wang, I-Hau Yeh, Hong-Yuan Mark Liao. YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information[J/OL]. (2024-02-21) [2024-11-08]. https://arxiv.org/abs/2402.13616.
[6]【YOLO系列】YOLOv9论文超详细解读(翻译+学习笔记)[EB/OL]. (2024-06-03)[2024-11-08].https://jrs0511.blog.youkuaiyun.com/article/details/136383022?spm=1001.2014.3001.5502.
[7]Haohui Y ,Junfei Z .UAV-PDD2023: A benchmark dataset for pavement distress detection based on UAV images[J].Data in Brief,2023,51109692-109692.
[8]【开源数据集】无人机道路破损检测数据集UAV-PDD2023[EB/OL]. (2024-07-04)[2024-11-08].https://blog.youkuaiyun.com/hzg19930513/article/details/140178467.

















 700
700

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









