



 该文提出一种自适应视觉目标跟踪框架,使用结构输出预测,结合核支持向量机避免了传统跟踪方法中样本生成和分类器更新的分离问题。通过在线学习提供自适应跟踪,同时引入预算机制控制支持向量的数量,以实现实时跟踪。实验证明,该算法在多种基准视频上优于先进跟踪器。
该文提出一种自适应视觉目标跟踪框架,使用结构输出预测,结合核支持向量机避免了传统跟踪方法中样本生成和分类器更新的分离问题。通过在线学习提供自适应跟踪,同时引入预算机制控制支持向量的数量,以实现实时跟踪。实验证明,该算法在多种基准视频上优于先进跟踪器。
带内核的结构化输出跟踪ICVV2011
摘要
自适应跟踪检测方法在计算机视觉中被广泛应用于跟踪任意物体。目前的方法把跟踪问题作为一个分类任务和使用在线学习技术来更新目标模型。然而,对于这些更新,需要将估计的对象位置转换为一组标记的训练示例,并且还不清楚如何最好地执行此中间步骤。此外,目标的分类(标签预测)没有显式耦合到目标跟踪器(物体位置的精确估计)。本文提出了一种基于结构输出预测的自适应视觉目标跟踪框架。通过明确允许输出空间表达跟踪需要,我们能够避免需要一步到位的分类步骤。方法利用核结构输出的支持向量机(SVM),它是通过在线学习提供自适应跟踪的。为了允许实时应用,我们引入预算机制,防止在跟踪过程中出现的支持向量数量的无限增长。实验上,我们证明我们的算法能够胜过各种基准视频的最先进的跟踪器。此外,我们还表明,我们可以很容易地将额外的特性和内核合并到我们的框架中,从而提高性能。
1. 简介
视觉对象跟踪是计算机视觉的核心问题之一,其广泛应用包括人机交互、监视和增强现实等。对于计算机视觉的其他领域,目标是执行更高级别的任务,如场景理解和动作识别,对象跟踪提供了必不可少的组件。
对于某些应用程序,预先要跟踪的对象是已知的,并且在设计跟踪器时有可能包含先验知识。但是其他情况下,它的理想是能够跟踪任意对象,可以在运行时指定。在这些情况下,服务器必须能够模型对象的外观,在跟踪过程中把模型运用到需要考虑的变化下,如照明条件,物体运动,闭塞。即使现有的关于对象的信息是已知的,有一个灵活性适应外观变化,将新的信息在跟踪过程中糅合的框架是有吸引力的,而在现实世界中的场景往往是成功的跟踪至关重要。
最近特别流行的一种跟踪方法是检测【2】,它将跟踪问题视为随时间变化的检测任务。这种流行的部分原因是最近在目标检测方面取得了很大进展,许多想法直接转移到跟踪。
另一个关键因素是某些方法的发展,允许通过这些方法用于在线训练的分类器,提供了一个自然机制的自适应跟踪。
通过检测方法的自适应跟踪实现了一个在线训练的分类器,用于区分目标对象和周围的背景。在跟踪过程中,这个分类器在上一帧的局部区域内寻找最大分类评分来估计目标位置,通常使用一个滑动窗口的方法。使用目标的预计定位,传统的算法生成一组二进制标记训练样本以实现在线更新。因此,这些算法把单独的跟踪器为两个不同的部分:(1)样本的生成及标记;(2)分类器的更新。
虽然广泛使用,这种分离仍然引发了一些问题。首先,有必要设计一种生成和标记样本的策略,目前尚不清楚如何以公式的方式进行这一工作。通常的方法依赖于预先定义的规则如样品到估计的目标位置的距离来决定应该标记为正还是负样品。其次,分类器的目的是正确预测一个样本的二进制标签,而跟踪的目的是准确地估计目标的位置。因为这两个目标是不是明确地耦合在学习过程中,最大分类率对应于对象位置的最佳估计这个假设可能不成立(类似点是在【22】由威廉姆斯提出)。目前的技术主要集中通过提高由于错误标记的样品分类的鲁棒性,由于这种方法跟踪性能的自适应状态。这方面的例子包括使用鲁棒损失函数【13,14】,半监督学习【11,17】,或多实例学习【3,23】。
本文采用不同的方法,将整个跟踪问题作为结构化输出预测的一部分,其中任务是直接预测帧间目标位置的变化。我们提出了一个新的原则性的自适应跟踪检测框架,它集成了学习和跟踪,避免了点对点更新策略的需要(见图1)。
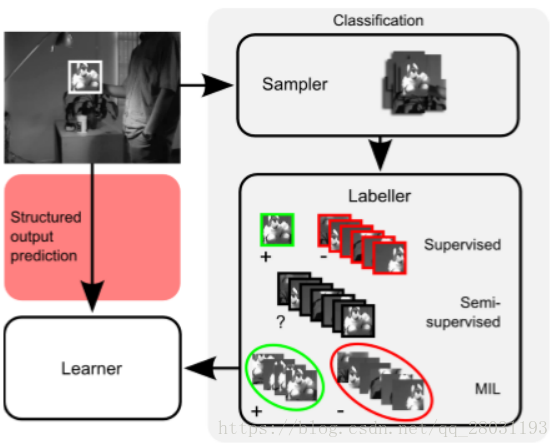
图1 不同的检测模式自适应跟踪:根据当前估计的对象位置,传统的方法(右边)产生一组样本,并根据学习者的类型产生训练标签。我们的方法(左边)避免这些步骤,和直接操作的跟踪输出。
最新的大多数跟踪检测方法都使用了基于Boosting的在线分类器 【3,10,16】变种。在目标检测中,对于特定的任务,Boosting被证明是非常成功的,最显著的是使用【20】的方法进行面部检测。这种方法的元素,特别是Harr_like特征表示,已成为几乎是标准的跟踪检测研究。然而,在目标检测中,最成功的研究往往是利用支持向量机(SVM)而不是Boosting,因为其良好的泛化能力,标签的噪声鲁棒性,并通过核函数表示的灵活性。由于SVM的灵活性和他们天然的结构化输出空间我们利用了【18】的结构化输出支持向量机框架。特别是,我们扩展了在线结构输出的SVM学习方法【5,6】提出适应跟踪问题。我们实验发现,我们的框架,造成了一个很大的性能提升,相比于其他的检测方法跟踪。
在【4】中,Blaschko和Lampert应用一个结构化输出svm对目标检测的任务,。在我们的设置没有离线标签的数据可用于训练(除第一帧帧被假定为一个标记),而是使用在线学习。然而,随着用训练数据量支持向量个数增加,核学习在线学习遇到了麻烦。因此,为了允许实时操作,需要控制支持向量的数目。最近,已经提出的方法在线学习分类支持向量机在一个固定预算,即支持向量个数限制保持在特定的的限制,例如【7,21】。我们在这项工作中应用类似的想法,并介绍了一种新的预算编制方法,适合在在线结构化输出支持向量机框架中使用。我们经验发现,使用预算计算在效率方面大获其利,而不明显影响对我们系统的跟踪性能。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









