




 随着VR技术的发展,越来越多的内容开发商加入市场,推动虚拟现实行业的进步。从VR头显到全景相机,各类产品不断涌现。游戏公司、影视企业及个人导演纷纷尝试这一新技术,创造出颠覆传统的新形式。
随着VR技术的发展,越来越多的内容开发商加入市场,推动虚拟现实行业的进步。从VR头显到全景相机,各类产品不断涌现。游戏公司、影视企业及个人导演纷纷尝试这一新技术,创造出颠覆传统的新形式。
这也刺激着越来越多的内容开发商加入其中,推动着虚拟现实行业继续前行。













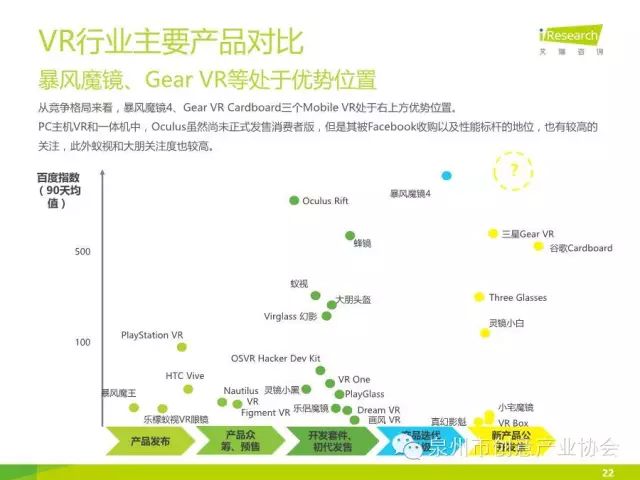
















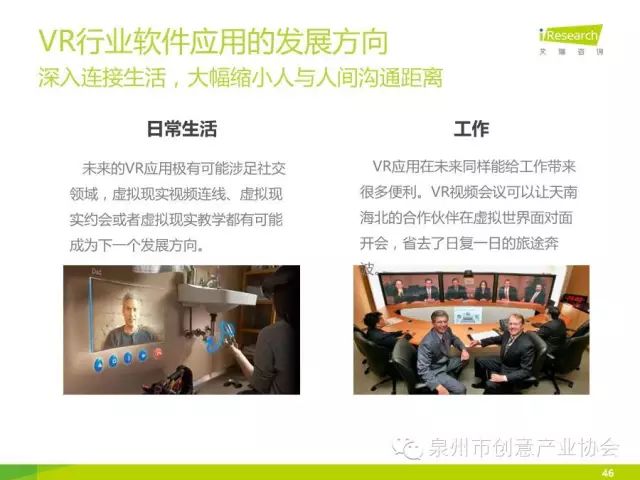
从VR头显和眼镜盒到交互外设再到全景相机,商家们快速地寻找自己在VR市场的位置,尽管整个市场尚未成熟。在行业应用方面,不管是游戏公司,还是影视公司,导演个人,亦或是媒体对这项新技术跃跃欲试,一些颠覆传统的新形式呈现在公众面前,无一不诉说着VR技术的魅力和与众不同

















 3068
3068

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









