






 本文详细介绍了如何迁移Docker根目录以节省磁盘空间,包括查找Docker根目录、清理占用空间、停止服务、拷贝文件、修改配置、重启服务及验证迁移后的信息。
本文详细介绍了如何迁移Docker根目录以节省磁盘空间,包括查找Docker根目录、清理占用空间、停止服务、拷贝文件、修改配置、重启服务及验证迁移后的信息。
docker目录占用磁盘空间太大,将docker的根目录迁移到其他目录
1. 查找docker工作根目录
输入命令docker info | grep 'Docker Root Dir'查找docker的根目录。
[root@master-woker /]# docker info | grep 'Docker Root Dir'

2. 查看工作目录占用空间大小
[root@master-woker /]# du -sh /data/k8s/docker/data

我这里只是做个示范,2.4G简直不要太小了。
3. 清理docker占用空间
该步骤为可选步骤,如果担心镜像被误删除,可以直接跳过该步骤。
3.1 查看docker占用的磁盘空间
命令docker system df可以查看docker占用的磁盘空间

3.2 清理docker占用空间
命令docker system prune可以用于清理docker占用的空间,删除关闭的容器、无用的数据卷和网络,以及dangling镜像(即无tag的镜像)
命令docker system prune -a可以清理所有没有被使用的docker镜像,即使容器只是暂时停止的状态。使用该命令之前请再三确认,避免删除重要的镜像等文件。
4. 迁移docker根目录
4.1 停止docker服务
[root@master-woker /]# systemctl stop docker
4.2 查看磁盘占用情况
查看本机磁盘的占用情况,找到合适的、空间足够大的磁盘来作为docker的根目录。
[root@master-woker /]# df -h
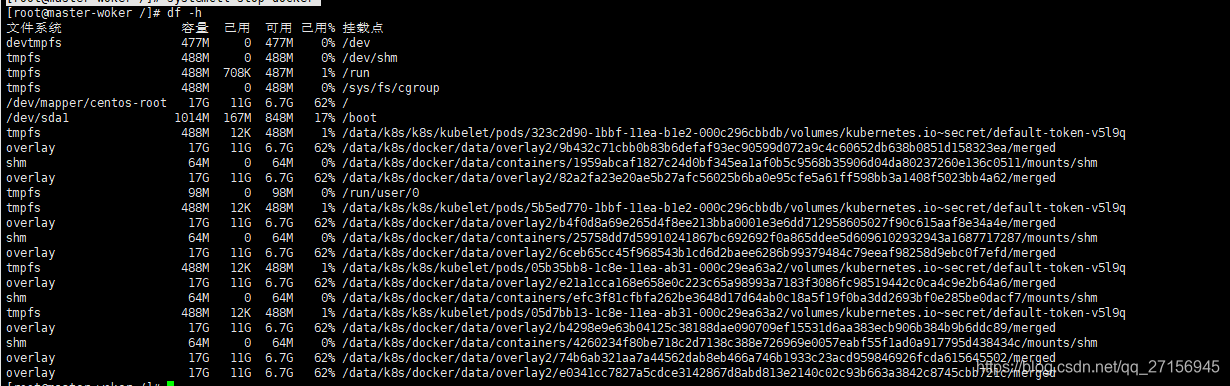
可以看到,我这个机器的/data目录空间最大,因为我们现在的docker根目录已经是在/data目录下面了(因为我之前已经迁移了一次了,这里只是再做一次演示记录),所以这次的演示会从目录/data/k8s/docker/data迁移到/data/docker/data。
4.3 拷贝旧目录文件到新目录下
建目录
[root@master-woker /]# mkdir /data/docker
开始拷贝,拷贝时间根据具体情况而定,应该要蛮久的。
/data/k8s/docker/data–>/data/docker/data。
[root@master-woker /]# cp -rf /data/k8s/docker/data /data/docker
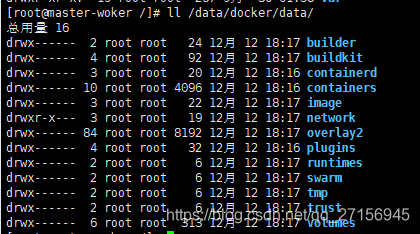
查看拷贝情况
[root@master-woker /]# ll /data/docker/data/
5. 修改配置的docker根目录
docker的工作目录/data/k8s/docker/data是通过配置文件指定的,我们需要找到该文件,并且将工作目录更改为/data/docker/data。
这个配置文件可能每种安装方式的位置有点不同。我现在知道的有两个地方。
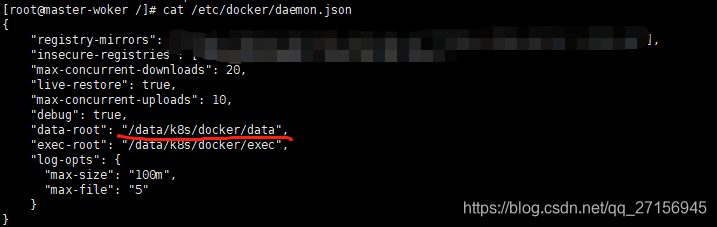
/etc/docker/daemon.json文件内。
- service文件内,我有一台机器放在
/usr/lib/systemd/system/docker.service.d/docker-options.conf这个地方,只是做个参考,但是一般也是写在docker的service文件里面的,可以通过查看服务信息找到,命令示例:systemctl status docker

找到你的配置文件所在位置,并修改图中划红线的地方,将旧的目录替换成新的目录。
/data/k8s/docker/data–>/data/docker/data。
6. 重启docker服务
[root@master-woker /]# systemctl daemon-reload
[root@master-woker /]# systemctl restart docker
7. 查看docker信息
[root@master-woker /]# docker info | grep 'Docker Root Dir'

可以看到现在的docker根目录已经成功由/data/k8s/docker/data迁移到/data/docker/data了。
8. 验证docker其他信息
如果不放心,可以重新看一下docker的镜像或者容器信息。
[root@master-woker /]# docker images

[root@master-woker /]# docker images

如果还是不放心的话,可以使用docker去pull一些大点儿的镜像,然后查看/data/docker/data文件夹的大小是不是发生了变化,记得pull之前先查看一下。查看文件夹大小的命令在后面一节。
如果确认完毕之后没有什么问题了,就可以把之前的旧目录给释放出来了。简单粗暴,直接删除/data/k8s/docker/data
9. 其他docker相关知识
顺便再附上一些解决该问题的过程中使用到的知识。
1.根据docker overlay中的文件夹名称,查找容器 。
docker ps -q | xargs docker inspect --format '{{.State.Pid}}, {{.Name}}, {{.GraphDriver.Data.WorkDir}}' | grep "文件夹名称"

有写文件夹找不到,就说明这个容器可能已经被删除了或者失效了。
2.查看文件夹占用磁盘空间大小
du -sh 文件夹名称

查看当前目录下所有子目录的大小,并从小到大排序:
du -sh ./*|sort -h

















 535
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









