







pytorch框架基于retinaface实现face检测
简介
RetinaFace是在RetinaNet基础上引申出来的人脸检测框架,所以大致结构和RetinaNet非常像。
主要改进:
1.MobileNet-0.25作为Backbone,当然也有ResNet版本。
2.Head中增加关键点检测。
3.Multi-task Loss
4.论文地址:https://arxiv.org/pdf/1905.00641.pdf
5.官方代码(mxnet):https://github.com/deepinsight/insightface/tree/master/RetinaFace
6.大牛Pytorch版:oaifaye/retinafaceoaifaye/retinafaceoaifaye/retinaface
模型结构
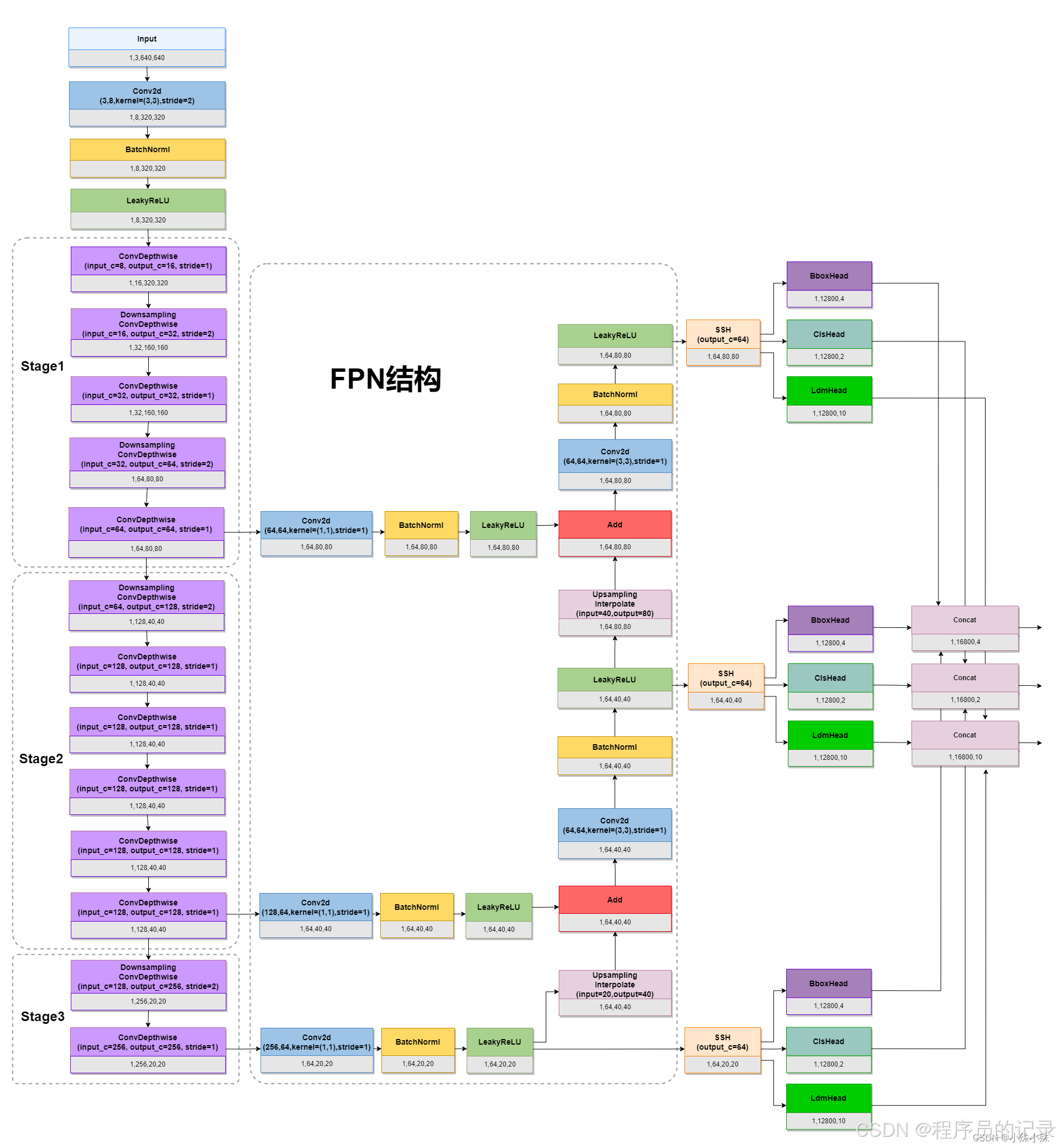
MobileNet-0.25
图中ConvDepthwise指MobileNet中的Depthwise Separable Convolution(深度可分离卷积),常规卷积在提取图像 特征图内特征相关性 的同时也提取 特征图通道间特征相关性,这样参数多而且难以解释。ConvDepthwise将这两项工作分开来做,减少了参数而且提高了可解释性。
ConvDepthwise结构如下:
先做3x3的卷积,并且groups设置成输入通道数,这组卷积核只负责提取每个特征图的特征,同时计算量大大减少
然后做1x1的卷积用于改变通道数,这组1x1的卷积核只提取通道间的特征相关性,同时参数大大减少。
两组操作处理后计算量和参数量降低,可解释性提升。
# 代码实现
def conv_dw(inp, oup, stride = 1, leaky=0.1):
return nn.Sequential(
nn.Conv2d(inp, inp, 3, stride, 1, groups=inp, bias=False),
nn.BatchNorm2d(inp),
nn.LeakyReLU(negative_slope= leaky,inplace=True),
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
nn.LeakyReLU(negative_slope= leaky,inplace=True),
)
 ### FPN结构 FPN 特征金字塔,多用于目标检测,因为目标有大有小,所以不同的特征层做融合有助于检测不同尺度的目标。
### FPN结构 FPN 特征金字塔,多用于目标检测,因为目标有大有小,所以不同的特征层做融合有助于检测不同尺度的目标。
这里FPN取了三个关键特征层,然后将通道数都处理成64,这样三个关键特征层由浅到深分别是1,64,80,80、1,64,40,40、1,64,20,20。
深层的关键特征层经过2x的Upsampling与浅层进行融合,最后三个融合后的分支分别输出到SSH结构。
SSH结构
SSH(Single Stage Headless)模块可以进一步增加感受野,进一步加强特征提取, SSH利用的也是多尺度特征融合的思想,融合了三路不同深度的特征,最后cancat到一起,输出和输入尺寸不变。结构如下:

class SSH(nn.Module):
def __init__(self, in_channel, out_channel):
super(SSH, self).__init__()
assert out_channel % 4 == 0
leaky = 0
if (out_channel <= 64):
leaky = 0.1
# 3x3卷积
self.conv3X3 = conv_bn_no_relu(in_channel, out_channel//2, stride=1)
# 利用两个3x3卷积替代5x5卷积
self.conv5X5_1 = conv_bn(in_channel, out_channel//4, stride=1, leaky = leaky)
self.conv5X5_2 = conv_bn_no_relu(out_channel//4, out_channel//4, stride=1)
# 利用三个3x3卷积替代7x7卷积
self.conv7X7_2 = conv_bn(out_channel//4, out_channel//4, stride=1, leaky = leaky)
self.conv7x7_3 = conv_bn_no_relu(out_channel//4, out_channel//4, stride=1)
def forward(self, inputs):
conv3X3 = self.conv3X3(inputs)
conv5X5_1 = self.conv5X5_1(inputs)
conv5X5 = self.conv5X5_2(conv5X5_1)
conv7X7_2 = self.conv7X7_2(conv5X5_1)
conv7X7 = self.conv7x7_3(conv7X7_2)
# 所有结果堆叠起来
out = torch.cat([conv3X3, conv5X5, conv7X7], dim=1)
out = F.relu(out)
return out
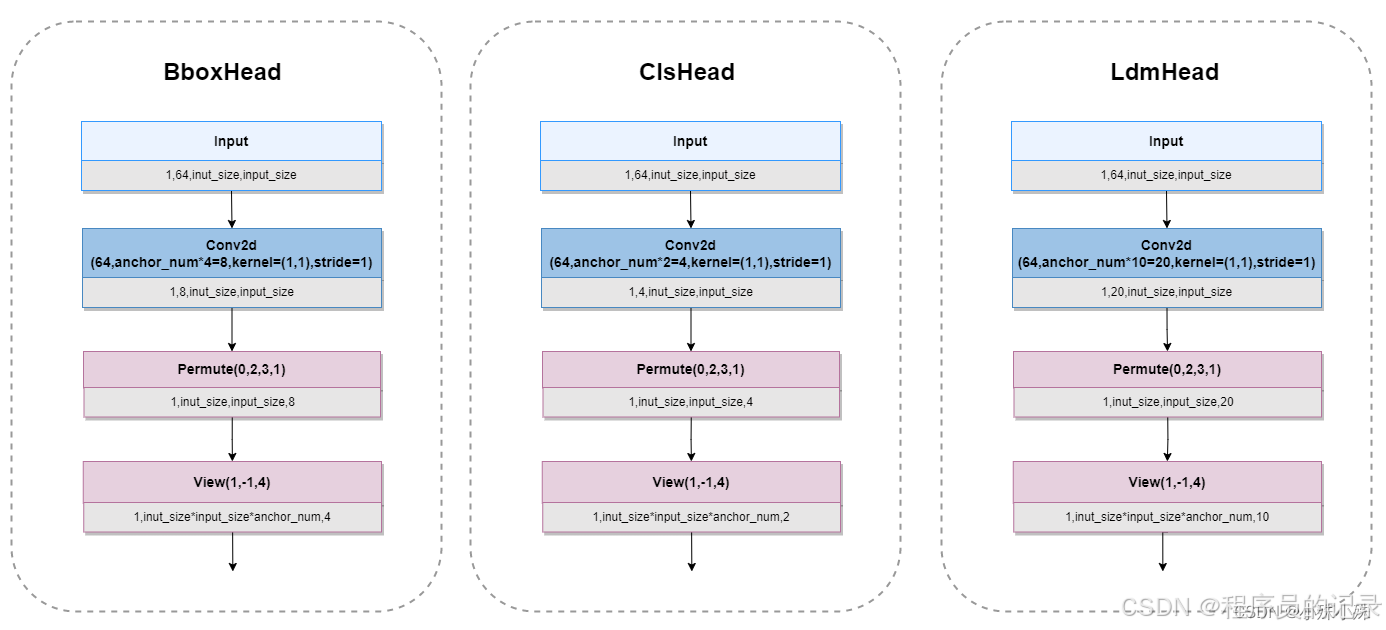
Head结构
Head分三种:
BboxHead:框的回归预测结果用于对先验框进行调整获得预测框,即解码前的bounding box的中心点偏移量和宽高。
ClsHead:分类预测结果用于判断先验框内部是否包含脸。
LdmHead:解码前的五官关键点坐标。
每个单元格使用两个1:1比例的Anchor(anchor_num=2),三个Head结构如下图。
class ClassHead(nn.Module):
def __init__(self,inchannels=512,num_anchors=2):
super(ClassHead,self).__init__()
self.num_anchors = num_anchors
self.conv1x1 = nn.Conv2d(inchannels,self.num_anchors*2,kernel_size=(1,1),stride=1,padding=0)
def forward(self,x):
out = self.conv1x1(x)
out = out.permute(0,2,3,1).contiguous()
return out.view(out.shape[0], -1, 2)
class BboxHead(nn.Module):
def __init__(self,inchannels=512,num_anchors=2):
super(BboxHead,self).__init__()
self.conv1x1 = nn.Conv2d(inchannels,num_anchors*4,kernel_size=(1,1),stride=1,padding=0)
def forward(self,x):
out = self.conv1x1(x)
out = out.permute(0,2,3,1).contiguous()
out = out.view(out.shape[0], -1, 4)
return out
class LandmarkHead(nn.Module):
def __init__(self,inchannels=512,num_anchors=2):
super(LandmarkHead,self).__init__()
self.conv1x1 = nn.Conv2d(inchannels,num_anchors*10,kernel_size=(1,1),stride=1,padding=0)
def forward(self,x):
out = self.conv1x1(x)
out = out.permute(0,2,3,1).contiguous()
return out.view(out.shape[0], -1, 10)
Anchor编解码
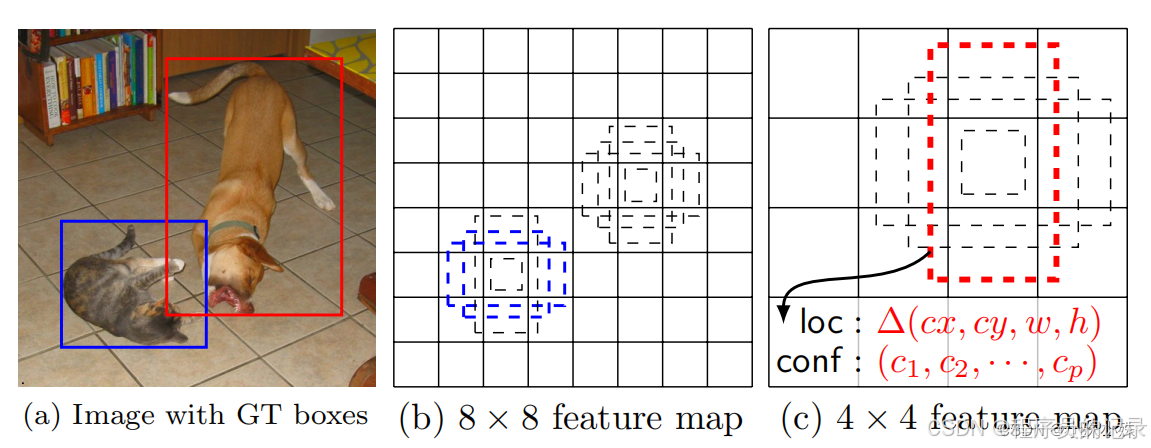
借用SSD的图(上图),SSH输出是将原图分割成80x80、40x40、20x20的单元格,每个单元有4个Anchor(两个等比例,两个不等比例),与之不同的是,我们每个单元格使用两个等比例的Anchor。
模型训练时使用Anchor编码,将ground truth映射到每个单元格的中心偏移和宽高。
预测时使用Anchor解码,将模型的输出还原为预测框。
def encode(matched, priors, variances):
# 进行编码的操作
g_cxcy = (matched[:, :2] + matched[:, 2:])/2 - priors[:, :2]
# 中心编码
g_cxcy /= (variances[0] * priors[:, 2:])
# 宽高编码
g_wh = (matched[:, 2:] - matched[:, :2]) / priors[:, 2:]
g_wh = torch.log(g_wh) / variances[1]
return torch.cat([g_cxcy, g_wh], 1) # [num_priors,4]
def encode_landm(matched, priors, variances):
matched = torch.reshape(matched, (matched.size(0), 5, 2))
priors_cx = priors[:, 0].unsqueeze(1).expand(matched.size(0), 5).unsqueeze(2)
priors_cy = priors[:, 1].unsqueeze(1).expand(matched.size(0), 5).unsqueeze(2)
priors_w = priors[:, 2].unsqueeze(1).expand(matched.size(0), 5).unsqueeze(2)
priors_h = priors[:, 3].unsqueeze(1).expand(matched.size(0), 5).unsqueeze(2)
priors = torch.cat([priors_cx, priors_cy, priors_w, priors_h], dim=2)
# 减去中心后除上宽高
g_cxcy = matched[:, :, :2] - priors[:, :, :2]
g_cxcy /= (variances[0] * priors[:, :, 2:])
g_cxcy = g_cxcy.reshape(g_cxcy.size(0), -1)
return g_cxcy
def decode(loc, priors, variances):
boxes = torch.cat((priors[:, :2] + loc[:, :2] * variances[0] * priors[:, 2:],
priors[:, 2:] * torch.exp(loc[:, 2:] * variances[1])), 1)
boxes[:, :2] -= boxes[:, 2:] / 2
boxes[:, 2:] += boxes[:, :2]
return boxes
def decode_landm(pre, priors, variances):
landms = torch.cat((priors[:, :2] + pre[:, :2] * variances[0] * priors[:, 2:],
priors[:, :2] + pre[:, 2:4] * variances[0] * priors[:, 2:],
priors[:, :2] + pre[:, 4:6] * variances[0] * priors[:, 2:],
priors[:, :2] + pre[:, 6:8] * variances[0] * priors[:, 2:],
priors[:, :2] + pre[:, 8:10] * variances[0] * priors[:, 2:],
), dim=1)
return landms
Multi-task Loss

如上图,损失函数分为三个部分:
- Face classification loss:是否人脸的交叉熵loss
- Face box regression loss:预测框的中心偏移、宽高和ground truth的smooth_l1_loss
- Facial landmark regression loss:预测的人脸关键点的smooth_l1_loss
class MultiBoxLoss(nn.Module):
def __init__(self, num_classes, overlap_thresh, neg_pos, variance, cuda=True):
super(MultiBoxLoss, self).__init__()
#----------------------------------------------#
# 对于retinaface而言num_classes等于2
#----------------------------------------------#
self.num_classes = num_classes
#----------------------------------------------#
# 重合程度在多少以上认为该先验框可以用来预测
#----------------------------------------------#
self.threshold = overlap_thresh
#----------------------------------------------#
# 正负样本的比率
#----------------------------------------------#
self.negpos_ratio = neg_pos
self.variance = variance
self.cuda = cuda
def forward(self, predictions, priors, targets):
#--------------------------------------------------------------------#
# 取出预测结果的三个值:框的回归信息,置信度,人脸关键点的回归信息
#--------------------------------------------------------------------#
loc_data, conf_data, landm_data = predictions
#--------------------------------------------------#
# 计算出batch_size和先验框的数量
#--------------------------------------------------#
num = loc_data.size(0)
num_priors = (priors.size(0))
#--------------------------------------------------#
# 创建一个tensor进行处理
#--------------------------------------------------#
loc_t = torch.Tensor(num, num_priors, 4)
landm_t = torch.Tensor(num, num_priors, 10)
conf_t = torch.LongTensor(num, num_priors)
for idx in range(num):
# 获得真实框与标签
truths = targets[idx][:, :4].data
labels = targets[idx][:, -1].data
landms = targets[idx][:, 4:14].data
# 获得先验框
defaults = priors.data
#--------------------------------------------------#
# 利用真实框和先验框进行匹配。
# 如果真实框和先验框的重合度较高,则认为匹配上了。
# 该先验框用于负责检测出该真实框。
#--------------------------------------------------#
match(self.threshold, truths, defaults, self.variance, labels, landms, loc_t, conf_t, landm_t, idx)
#--------------------------------------------------#
# 转化成Variable
# loc_t (num, num_priors, 4)
# conf_t (num, num_priors)
# landm_t (num, num_priors, 10)
#--------------------------------------------------#
zeros = torch.tensor(0)
if self.cuda:
loc_t = loc_t.cuda()
conf_t = conf_t.cuda()
landm_t = landm_t.cuda()
zeros = zeros.cuda()
#------------------------------------------------------------------------#
# 有人脸关键点的人脸真实框的标签为1,没有人脸关键点的人脸真实框标签为-1
# 所以计算人脸关键点loss的时候pos1 = conf_t > zeros
# 计算人脸框的loss的时候pos = conf_t != zeros
#------------------------------------------------------------------------#
pos1 = conf_t > zeros
pos_idx1 = pos1.unsqueeze(pos1.dim()).expand_as(landm_data)
landm_p = landm_data[pos_idx1].view(-1, 10)
landm_t = landm_t[pos_idx1].view(-1, 10)
loss_landm = F.smooth_l1_loss(landm_p, landm_t, reduction='sum')
pos = conf_t != zeros
pos_idx = pos.unsqueeze(pos.dim()).expand_as(loc_data)
loc_p = loc_data[pos_idx].view(-1, 4)
loc_t = loc_t[pos_idx].view(-1, 4)
loss_l = F.smooth_l1_loss(loc_p, loc_t, reduction='sum')
#--------------------------------------------------#
# batch_conf (num * num_priors, 2)
# loss_c (num, num_priors)
#--------------------------------------------------#
conf_t[pos] = 1
batch_conf = conf_data.view(-1, self.num_classes)
# 这个地方是在寻找难分类的先验框
loss_c = log_sum_exp(batch_conf) - batch_conf.gather(1, conf_t.view(-1, 1))
# 难分类的先验框不把正样本考虑进去,只考虑难分类的负样本
loss_c[pos.view(-1, 1)] = 0
loss_c = loss_c.view(num, -1)
#--------------------------------------------------#
# loss_idx (num, num_priors)
# idx_rank (num, num_priors)
#--------------------------------------------------#
_, loss_idx = loss_c.sort(1, descending=True)
_, idx_rank = loss_idx.sort(1)
#--------------------------------------------------#
# 求和得到每一个图片内部有多少正样本
# num_pos (num, )
# neg (num, num_priors)
#--------------------------------------------------#
num_pos = pos.long().sum(1, keepdim=True)
# 限制负样本数量
num_neg = torch.clamp(self.negpos_ratio*num_pos, max=pos.size(1)-1)
neg = idx_rank < num_neg.expand_as(idx_rank)
#--------------------------------------------------#
# 求和得到每一个图片内部有多少正样本
# pos_idx (num, num_priors, num_classes)
# neg_idx (num, num_priors, num_classes)
#--------------------------------------------------#
pos_idx = pos.unsqueeze(2).expand_as(conf_data)
neg_idx = neg.unsqueeze(2).expand_as(conf_data)
# 选取出用于训练的正样本与负样本,计算loss
conf_p = conf_data[(pos_idx+neg_idx).gt(0)].view(-1,self.num_classes)
targets_weighted = conf_t[(pos+neg).gt(0)]
loss_c = F.cross_entropy(conf_p, targets_weighted, reduction='sum')
N = max(num_pos.data.sum().float(), 1)
loss_l /= N
loss_c /= N
num_pos_landm = pos1.long().sum(1, keepdim=True)
N1 = max(num_pos_landm.data.sum().float(), 1)
loss_landm /= N1
return loss_l, loss_c, loss_landm
环境
开发环境
- GPU服务器:pytorch1.13.0,python3.10,cuda==11.7
- nvidia-smi 查看 CUDA 版本
conda create -n retinaface python=3.7
conda activate retinaface
pip3 install torch torchvision torchaudio -i https://pypi.tuna.tsinghua.edu.cn/simple
pip3 install tensorboard scipy numpy matplotlib -i https://pypi.tuna.tsinghua.edu.cn/simple
pip3 install opencv_python Pillow==9.4.0 h5py -i https://pypi.tuna.tsinghua.edu.cn/simple
pip3 install tqdm -i https://pypi.tuna.tsinghua.edu.cn/simple
数据
简介
Wider Face数据集,标记文件使用retinaface_gt_v1.1.zip

















 648
648

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









