








 本文介绍了一种名为RMPE的创新框架,用于解决多人姿态估计中的关键问题。该框架包括SSTN、Parametric Pose NMS和PGPG三个关键组件,旨在从不准确的包围框中提取高质量的单人区域,解决冗余检测问题,并增加训练样本,提高模型泛化能力。在MPII数据集上,RMPE达到了mAP76.7的优秀成绩。
本文介绍了一种名为RMPE的创新框架,用于解决多人姿态估计中的关键问题。该框架包括SSTN、Parametric Pose NMS和PGPG三个关键组件,旨在从不准确的包围框中提取高质量的单人区域,解决冗余检测问题,并增加训练样本,提高模型泛化能力。在MPII数据集上,RMPE达到了mAP76.7的优秀成绩。
摘要
多人姿态估计
现存方法效果不错,但定位和识别上的小错误是不可避免的,这些错误会导致单人姿态估计的失败。
文章提出一种新颖的框架——RMPE:Regional Multi-Person Pose Estimation
这框架包含了三个部分关键点:
- Symmetric Spatial Transformer Network (SSTN),从不准确的包围框中提取高质量的单人区域。
- Parametric Pose Non-Maximum-Suppression (NMS) ,解决冗余问题,利用姿态相似代替IOU
- Pose-Guided Proposals Generator (PGPG),增加训练样本,提高泛化
我们的方法能够处理不准确的box和冗余检测结果
在MPII multiperson 数据集上mAP 76.7
介绍
在实践中,识别多人在野外的姿势比识别图像中一个人的姿势更具挑战性
两步框架首先检测人体包围框,然后独立估计每个框中的姿态。(如本文)
基于部件的框架首先独立检测人体部件,然后将检测到的人体部件组装成多个人体姿态。(PAF)
文章沿用两步的框架,现有的方法有两个问题:
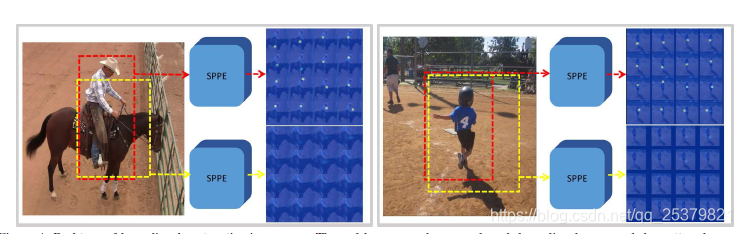
上图中红色的GT和黄色的检测结果,都送给SPPE的Hourglass方法检测关节点的heatmap,从heatmap的结果来看,虽然检测框结果和GT已经很接近(iou>0.5),然而从heatmap来看,输出的相应却相差甚远,即person检测box的精度会严重影响pose的估计
另外一个就是如上图所示的person 检测框冗余问题,NMS只是一种带强烈先验(如果重合度太高的结果,一般是同一个目标)的tradeoff,如果NMS效果太强,recall就会迅速降低
这两个问题暴露了,SPPE受到box质量影响很大,文章剑指这个问题

















 631
631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









