







 本文介绍了基于Kalman滤波的永磁同步电机(PMSM)状态观测,详细阐述了状态观测器的概念,EKF估计过程,并展示了Simulink的实现。文章探讨了系统模型与实际偏差的处理,反馈矩阵G的确定以及过程和测量噪声的影响。虽然理论深入,但提供了简化实践的方法。
本文介绍了基于Kalman滤波的永磁同步电机(PMSM)状态观测,详细阐述了状态观测器的概念,EKF估计过程,并展示了Simulink的实现。文章探讨了系统模型与实际偏差的处理,反馈矩阵G的确定以及过程和测量噪声的影响。虽然理论深入,但提供了简化实践的方法。
0前言
从此篇文章起,陆续会发几篇关于基于kalman的永磁同步电机状态观测,即无传感器控制的文章。在完成基础的矢量控制算法以后,自然也要进军无传感器控制,对电机的数学模型有进一步的认识,理解。这部分涉及的理论的东西比较多,工程师实现起来可能并不是很费劲,也不需要完全理解。但作为学生在学习时,还是渴望能够从头至尾理解透彻。
连载的第一篇,首先会给大家建立状态观测器的概念,然后对整个使用kalman进行估计的过程简单介绍,最后展示simulink的实现结果。关于simulink的模型与c-mex程序,在后期做些活动会考虑在公众号免费赠送。
1.状态观测器
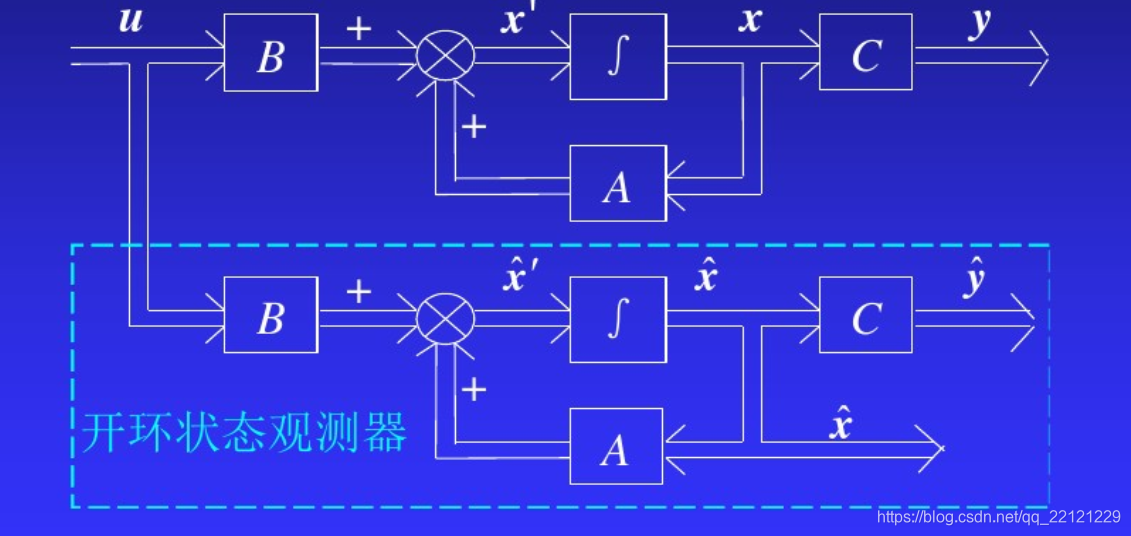
如图所示的系统框图,上面的部分可认为实际的控制系统模型,而虚线框内的则是开环形式的状态观测器,一言以蔽之,它就是控制系统的数学模型,从而在给予相同输入下,可以得到估计值y1,若系统模型与实际系统完全一致,则观测器输出y1与y完全相等,然而不如意者十之八九,理想与现实必然存在偏差,e=y-y1,在经典控制理论中,为了保证输出与输入偏差为0 ,我们引入了反馈的概念,同样&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1260
1260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









