






 本文详细介绍了F-FEM-CON模块的功能和使用方法,包括模拟量输入、输出,数字量输入、输出,计数器输入,频率输出以及看门狗输出等。重点讲解了各个通道的工作原理、配置参数及注意事项。
本文详细介绍了F-FEM-CON模块的功能和使用方法,包括模拟量输入、输出,数字量输入、输出,计数器输入,频率输出以及看门狗输出等。重点讲解了各个通道的工作原理、配置参数及注意事项。
文章目录
4 关于如何使用
大量的输入和输出通道使 F-FEM-CON 称为一个非常全能的模块,为了发挥模块的最好的功能,需要好好理解模块的功能,下面的框图只展示了模块的最主要的功能的部分。
下面的按照软件中的功能组的顺序来描述功能
4.1 模拟量输入
F-FEM-CON配备了5个模拟量的输入通道,其中4个可以按照普通的配置方法来配置成电压或者电流通道,第5个特别适合小电压的测量
每个通道都配备了数模转换器,数模转换的参数如下
- 分辨率
24位分辨率
非线性度 0.0015% - 过采样数字滤波
- 差分输入
- 有截止频率的可编程的采样速率
- 芯片内部可以校准ADC的比例和偏移
- 没有抗锯齿滤波器,因为过采样滤波还有数字滤波,还有一个RC滤波器,这些足够了
4.1.1 方框图
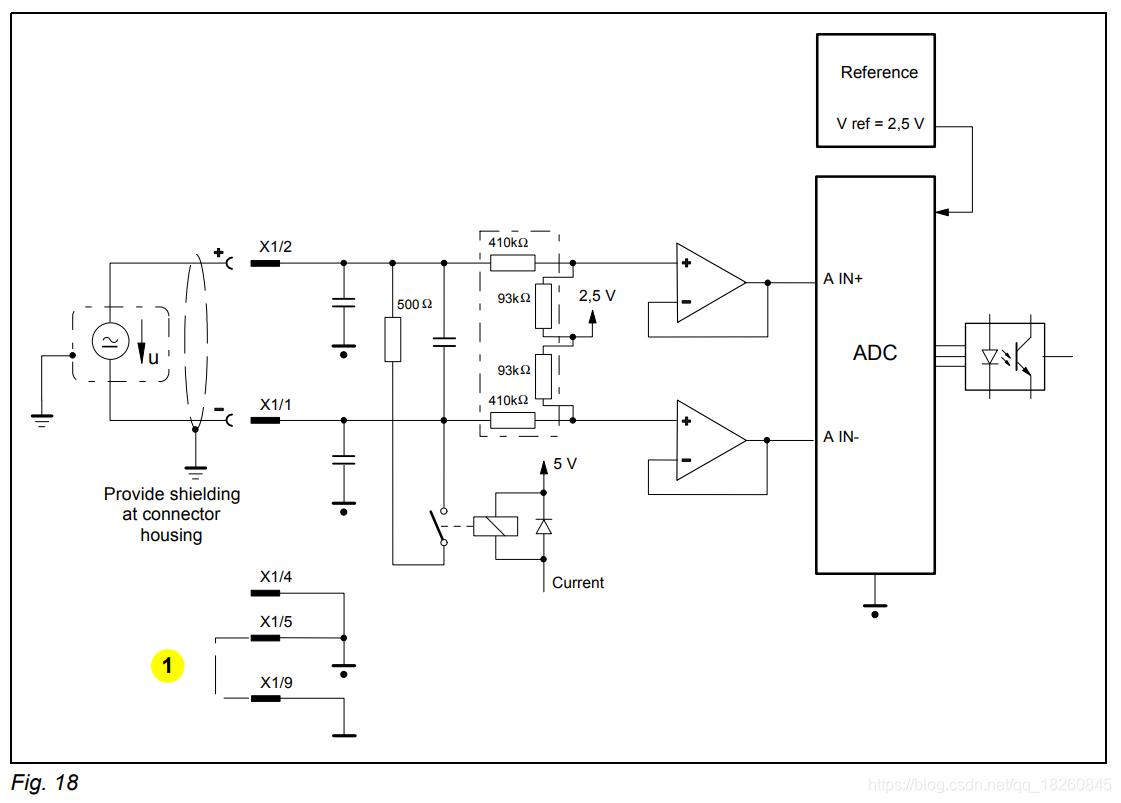
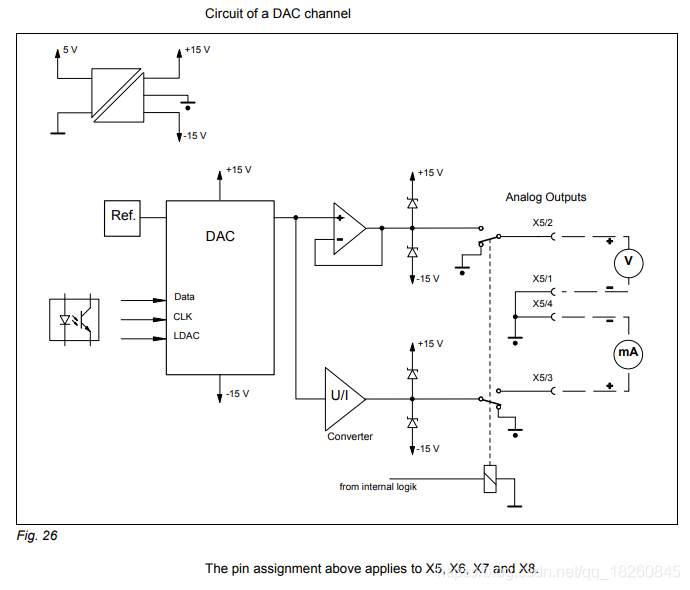
注意:在模拟地和数字地之间的电气绝缘可以通过连接X1/5脚和X1/9脚来移除,在这种情况下,属于“不带绝缘”的使用情况
这些PIN脚同样适用于 X1,X2,X3还有X4
在软件上配置这个接口的时候,你需要指定测量的是电压还是电流,这将决定是否有一个并联的500Ohm的电阻来分压
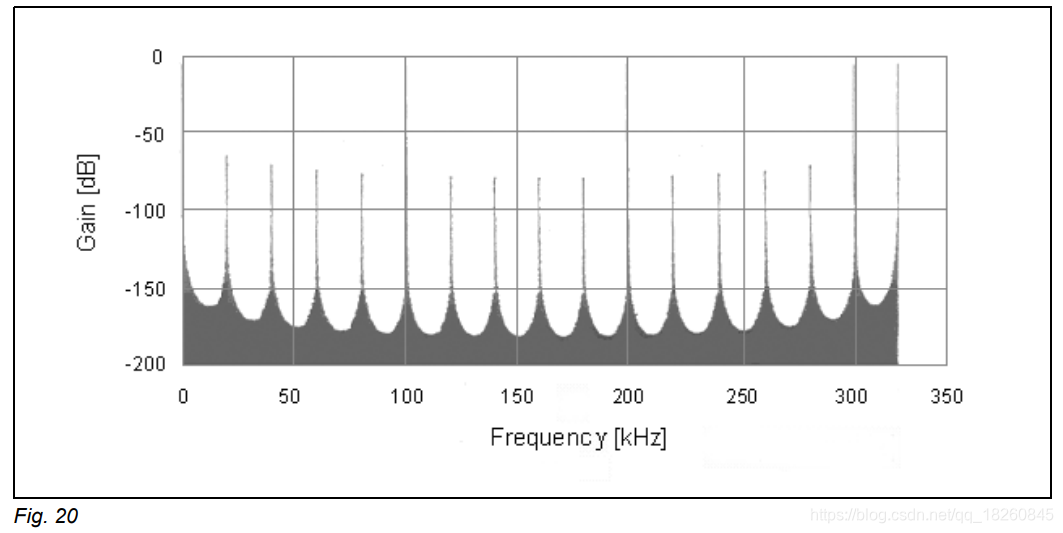
4.1.2 采样速率和抗锯齿
ADC模块提供了卓越的采样速率,采样时单位时间内获取数据的频次,可以通过数字滤波器来降低采样速率
下图为模数转换的复合传递函数
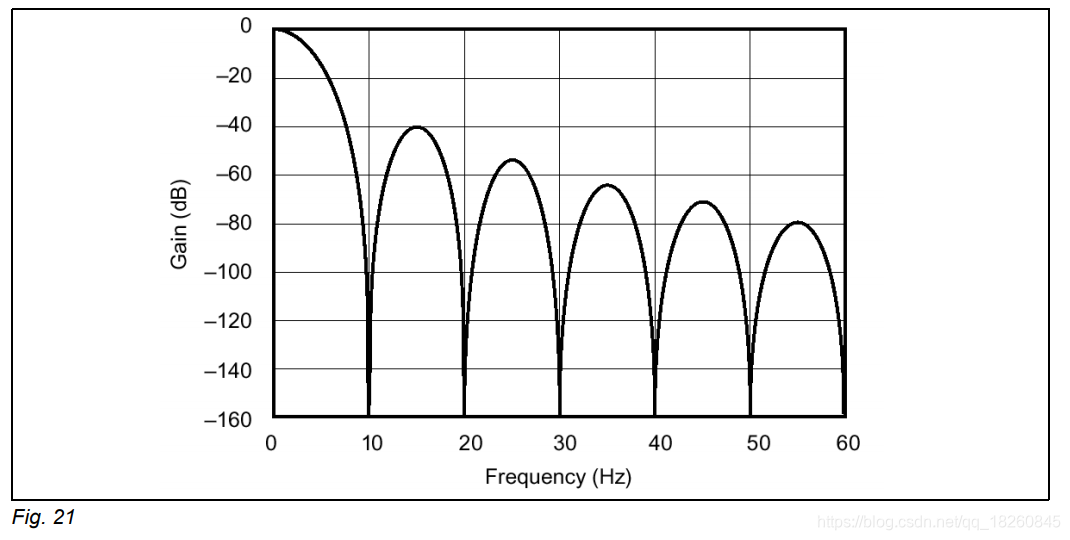
下图是频率响应
4.1.3 AC特性
4.1.3.1 需求
为了达到指定的采样速率,需要按照21页的安装和屏蔽要求,这有这样的信号的采集速度才能达需求的质量
4.2 模拟量输入单元
4.2.1 原理图
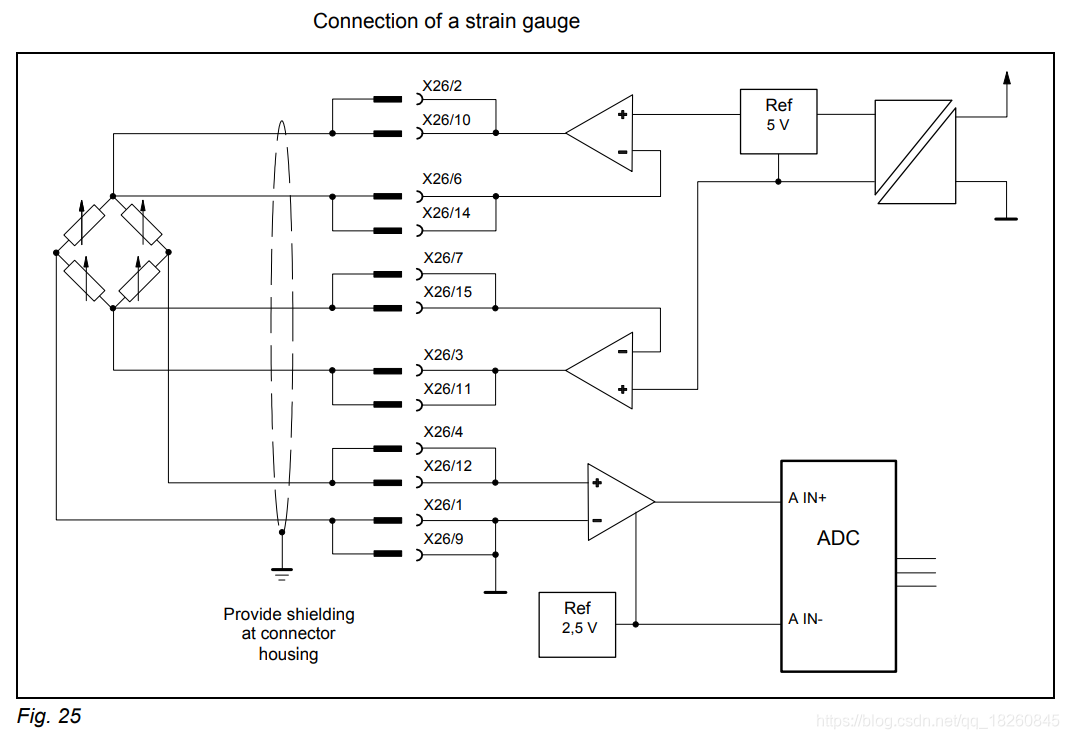
指定电阻可以被补偿,这样的话四线制的拉力传感器的测量精度将会达到最高
输入信号的阻抗很高,这样是可以防止负载的被加载,因此,当它的左边打开的时候,传感器对的输入将会达到满量程。这时候就有可能传感器接错了
4.3 模拟量输出
每一个模拟量的通道都提供一个带电气隔离的16位的DAC输出,一个高精度的电压参考,还有一个电压和电流输出桥,为了达到期望的精度,每一个输出通道在生产阶段都要经过检查,然后这些偏差会锁存在F-FEM-CON的EEPROM中,然后F-FEM-CON的软件会计算这些偏差,最终达到目标精度,注意,不要同时使用电压和电流输出
4.3.1 原理方框图
4.4 数字量输入
4.4.1 方框原理图
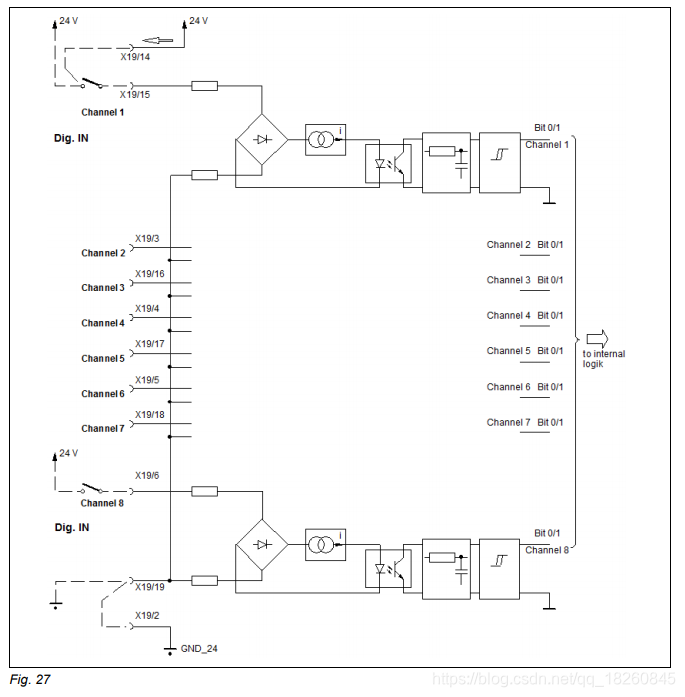
这些针脚定义同样适用于X19和X20
数字量的输入是有反向电极保护的,所以接头的PIN脚没有明显的正极或者负极,如果数字量输入用来检测一些有高电感的电路,比如数字输出电源驱动一个继电器,这个继电器是反馈到一个数字输入中的,这时候负载的跌落电压要在逻辑低位之下
每一组的8个输入都有一个公共的参考电势,这个公共的参考电势可以连接到24V上或者地上,如上面的图所示
4.5 数字量输出
4.5.1 方框原理图

这个原理图同样适用于X12, X19, X20针脚,PIN14脚的输出是连接到内部的24V供电的,可以从这上面取电
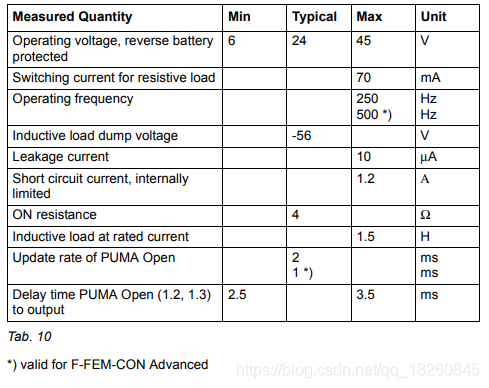
最高的电压是56V
8路的输出有一个相同的电源,还有一个共同的地
4.5.2 参数
4.6 计数器输入
脉冲计数器支持一相或两相,可以带参考脉冲或者不带参考脉冲,脉冲计数器可以在一个可编程门阵列中关联的,下面展示的输入电流可以帮你为每一个传感器类型选择合适的输入
4.6.1 数字输入的电流输入
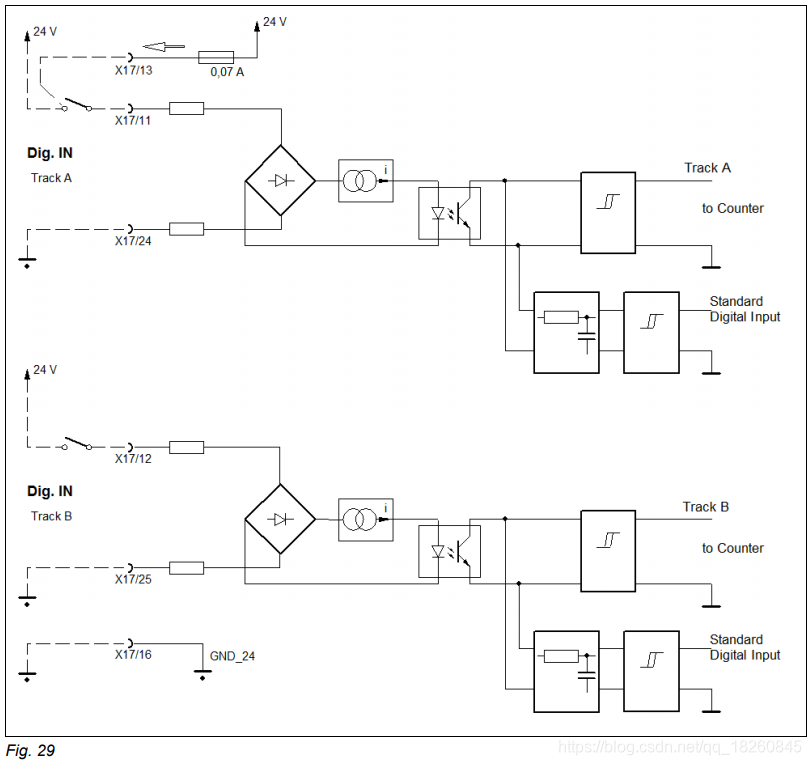
所有的数字输入都可以用来作为计数或者是作为标准的数字输入,上面的Pin脚同样适用于X17和X18
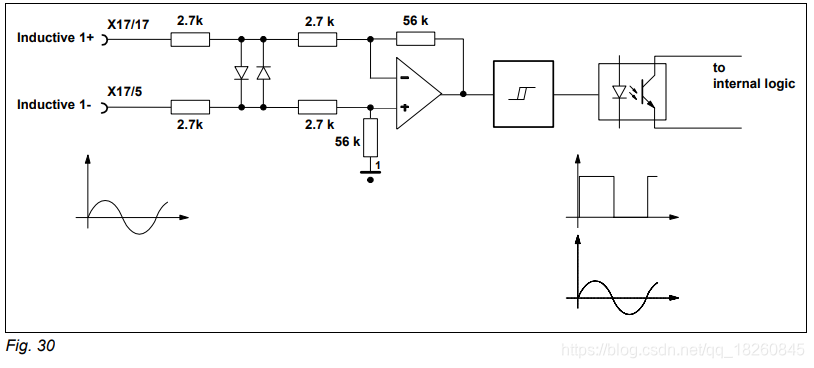
4.6.2 对于感应电路的采样
4.6.3 增量式编码器输入
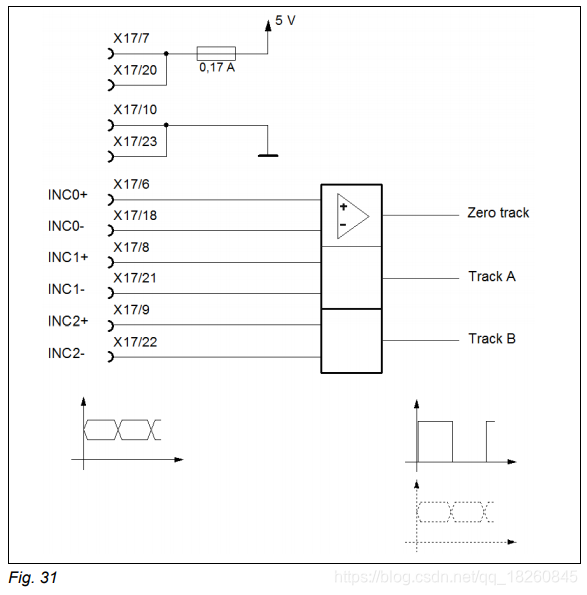
PIN脚定义同样适用于X17和X18
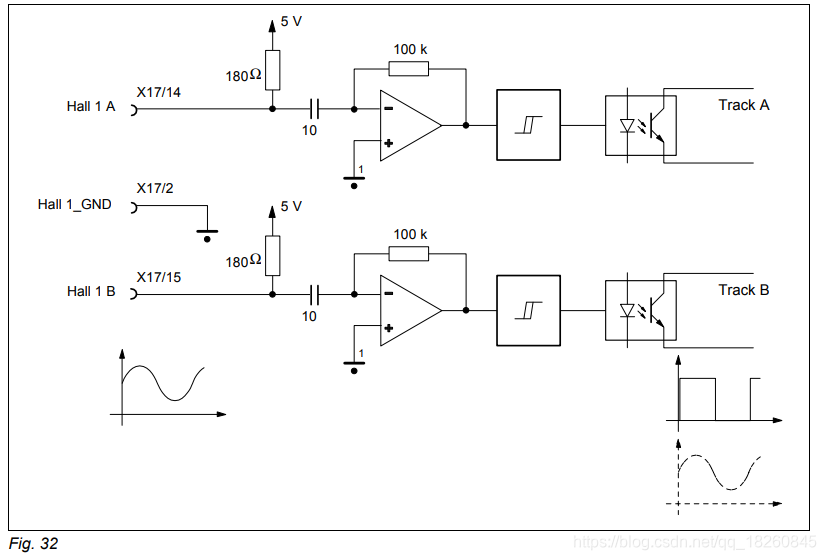
4.6.4 霍尔电路采样
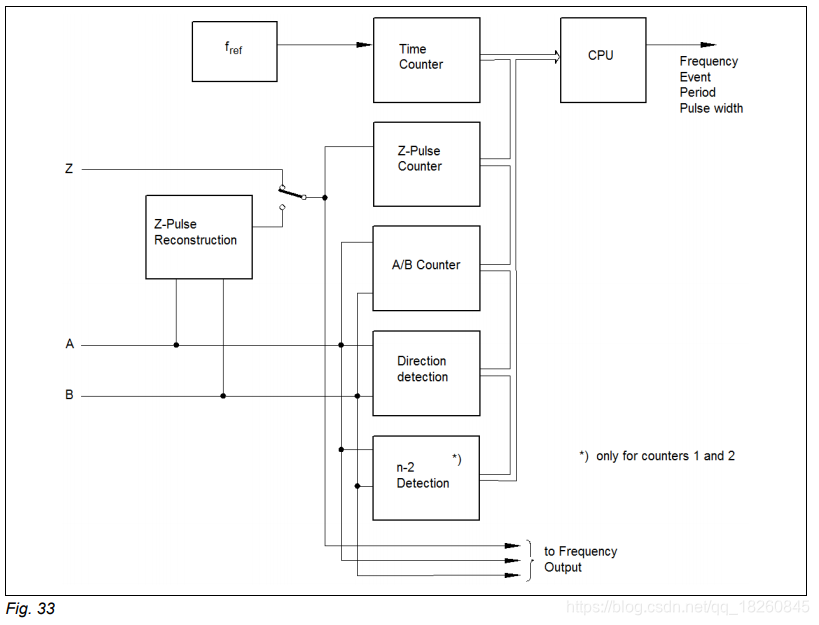
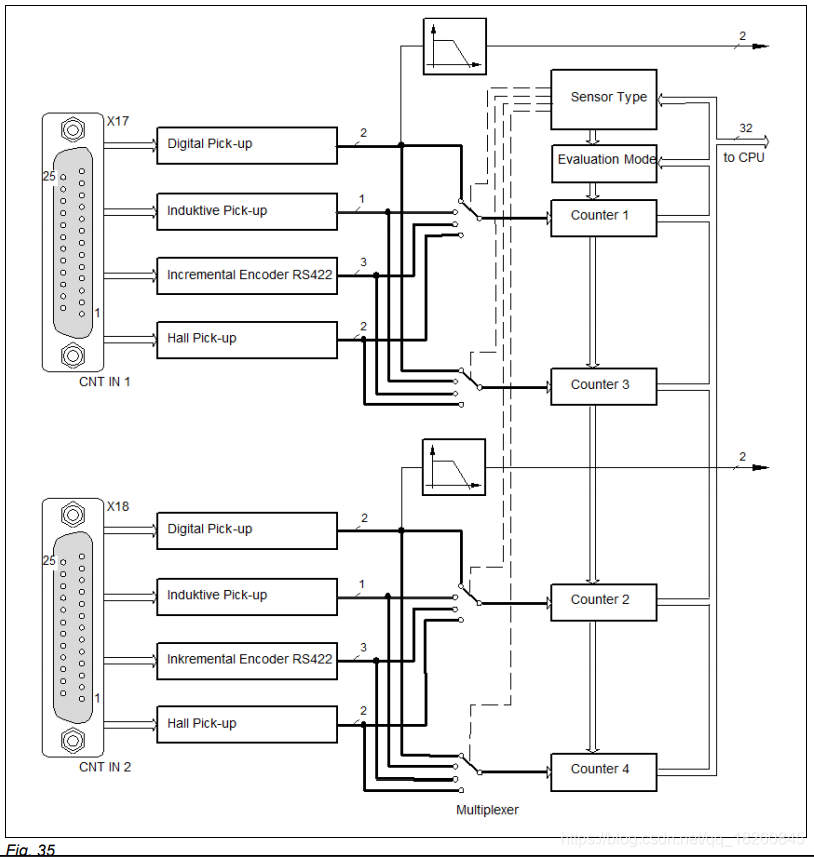
4.6.5 功能描述
测量的原则不仅仅会计数脉冲的持续时间,同时还记录脉冲之间的时间,因此,不必去考虑两个采样点之间的时间
关于计数器通道的原理方框图
4.6.6 边缘测量
每一次数字信号的等级的变换,我们都称之为边沿,从高到低叫下降沿,从低到高叫上升沿
4.6.6.1 单边评估
在单边测量的时候,计数器只在脉冲的上升沿对的时候触发
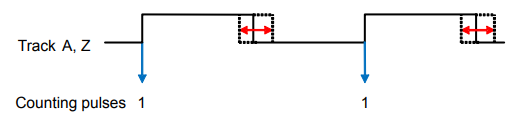
对于双通道的信号测量的时候,旋转的方向是由第二个边缘触发的的函数决定的
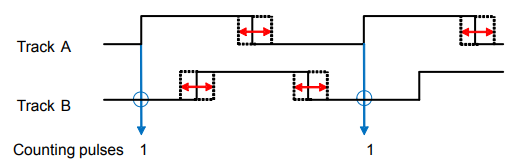
Pro:不平衡的编码器(高脉冲和低脉冲的长度不同)是没有影响的(看红色范围)
Con:降低分辨率
4.6.6.2 多边缘测量
多边缘测量的时候,信号在上升沿的时候和下降沿的时候会产生多个脉冲
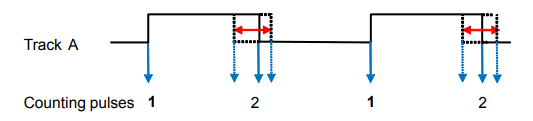
瑞昱双通道的编码器,当一个通道的脉冲发生的时候,往往对应着另一个通道在其脉冲中,如果旋转相反的时候,就反过来
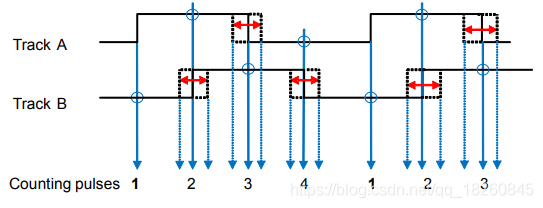
Pro:在低速的时候有较好的分辨率,干扰信号可以被抑制
Con:所有的不平衡的信号都以波动或抖动的方式来干扰测量信号(信号的脉宽不等于50%并且信号之间相互不一样,信号不是正交的,比如相的位移不是90度),为了减少这些影响,最好使用增量式输出,尝试避免数字输入,因为这样会增加差分信号的抖动量
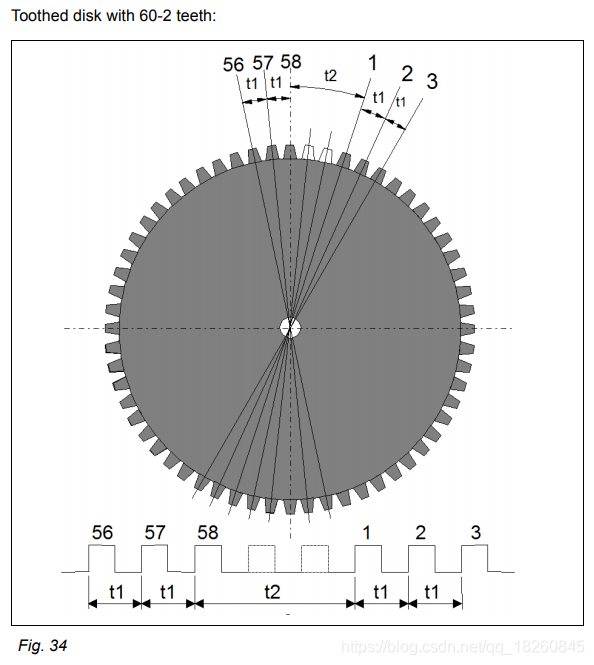
4.6.7 n-2齿的测量
通道1和通道2可以测量出齿盘缺2个齿的情况,这是通过比较前面一个齿的时间还有后面一个齿的时间来判断的,这个功能可以使用传感器对的“Freq-2 A-unsigned”来激活。
这两个缺的齿的间隙是由固件来计算的,当前的转速被认为是缺齿的齿的转速
缺齿的模拟可以有频率输出所输出
最小的转速是500转,由于齿宽的限制,对于低于这个转速值,将不会被计算,在 F-FEM-CON Advanced中被限制到625转,这些速度限制是基于60个齿的齿盘的,对于其他的齿盘使用与各自的速度限制相关的频率值来计算转速限值
低于这个转速限值的转速中,缺的齿将忽略,这可能会造成转速突变
这个观念同样适用于超过60的齿数,因为修正时没有考虑到牙盘的齿数,在修正系数中,缺齿的齿数是非常重要的,因此这个理念被称为是“n-2”
4.6.8 n - 1缺齿的齿盘
在上面的章节中说到了n-2齿,通常一些吃哦按有35个齿,然后缺一个齿,但是这个观念是相同的,因此我么叫它“n-1”
4.6.9 计数器通道的原理方框图
4.7 频率输出
4.7.1 原理方框图
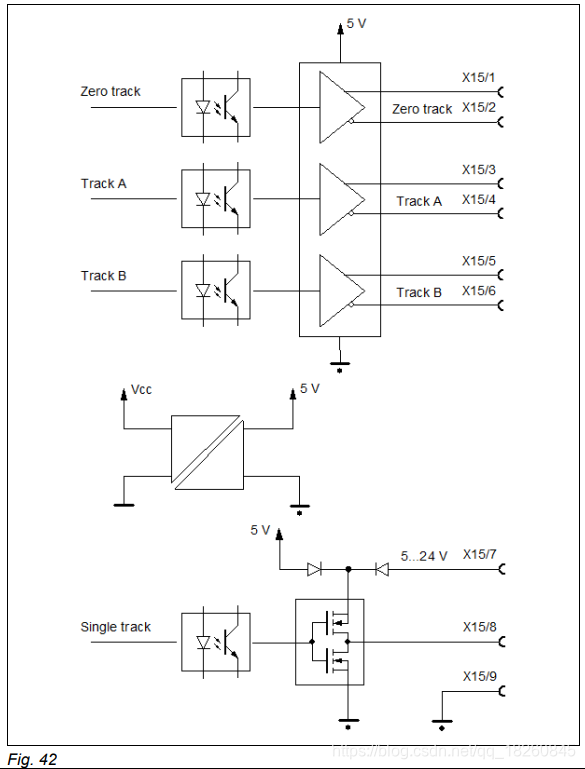
上面的PIN脚图同样适用于X15和X16通道
输出频率和占空比可以在很大范围内变化,不过通常情况下,两个只变一个
比如:
对于表示转速的模拟量值(表示转速为900 - 8000Rpm)可以被配置成5% - 95%中,频率是固定的1KHz
对于表示扭矩的的值(表示扭矩为20 - 200Nm),可以配置成一个频率变化范围为200Hz到2000Hz,但是占空比是不变的50%
4.7.2 关于模式的描述
这两个频率的输出可以按照不同的方式来使用,所有的可能的信号类型在下面都会展示,下面只展示通道1的描述,它和通道2是相同的
注意,有些功能可能有固件限制,比如3.0.x的固件版本
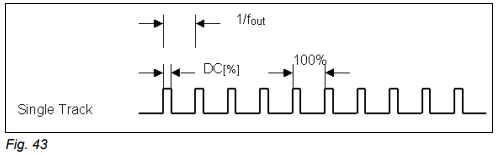
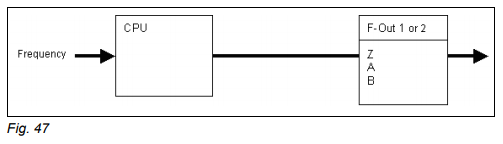
4.7.2.1 信号类型:PWM,PWM inverterd
这种类型的频率信号是输出预定占空比的单通道的信号

期望的输出频率是通道A和通道B的两倍,是通过两个通道的相位差的变化所实现的,如下图,0-100%的占空比对应着相位的0-180度
这时候的ABZ的频率输出如下图所示
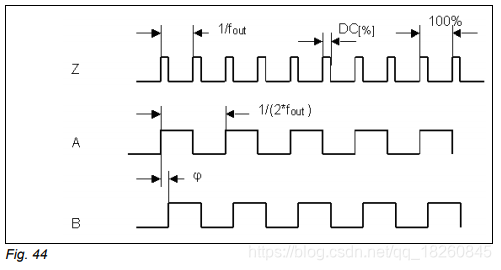
“PWM”和“PWM inverted”用入眠的公式来描述占空比
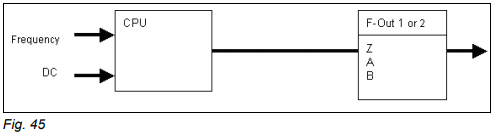
PWM输出的原理方框图如下
4.7.2.2 信号类型 ABZ模拟信号
这个模式下,输出信号是一个0点位置信号,还有A通道和B通道,AB的频率是Z乘以齿数
ABZ模拟信号的原理方框图如下:
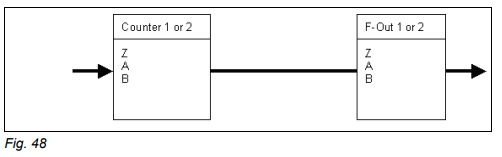
4.7.2.3 信号类型:信号转发模式
当连接两个计数器信号的时候,这两个频率输出通道可以用来做信号转发的任务, 所有可用的计数器输入都可以作为一个信号源,固件支持多种转发方法,如下所述
-
ABZ直通模式
在直通ABZ模式下,F-OUT 1通道和 F-OUT 2 通道的三个信号是无差传输的,这是一种延迟最小的方法,因为计数器的信号环是在硬件中直接贯通的,原理方框图如下
-
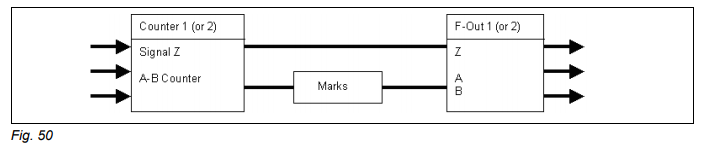
DZ模式
在Z直通模式下,将会测量通道1和通道2的计数的数量,然后在通过一个系数运算后通过F-OUT1和F-OUT2通道输出
0通道的频率是不会改变的,原来的0点中心是保留的,是不允许通道1和通道2的交叉的
总的意思是,AB信号需要计算一下,Z是不变的
-
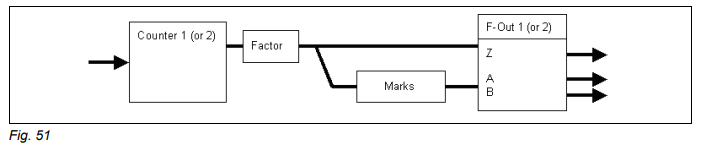
最后一个模式的意思就是ABZ三个信号都算一下然后转出去
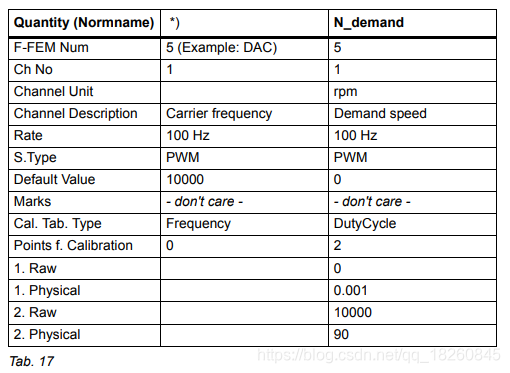
4.7.5 通过PWM模式的频率模式输出期望模拟量的PWM输出
例子:
转速请求值从0 - 10000Rpm,期望和电压输出(频率信号)关联在一起,然后输出的电压是0 - 10V
PWM数字信号可以在使用积分器(比如RC滤波器)的时候来转换成模拟量,我们选择10KHz作为基频,通过调节占空比0-100%来实现电压的0-10V的变换,单通道的频率输出(PIN8和PIN9)有一个大概5V的电压,还可以通过PIN7的帮助下实现高电压的输入
必须通过用户的负载电阻和纹波的要求来确定RC滤波器的参数,对我们来说,假设积分时间常数比载波频率高100倍就够了,因此我们需要一个100Ohm的电阻和一个47uF的电容
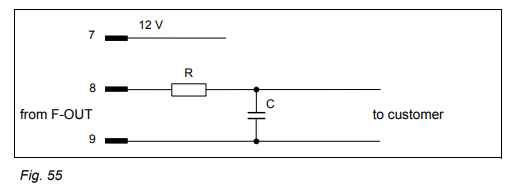
在PUMA中的FFS按照如下的设置来设置
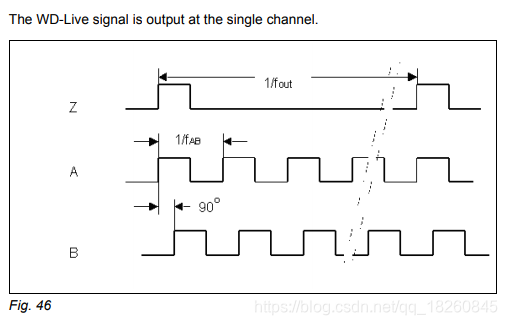
4.8 看门狗输出
4.8.1 方框原理图
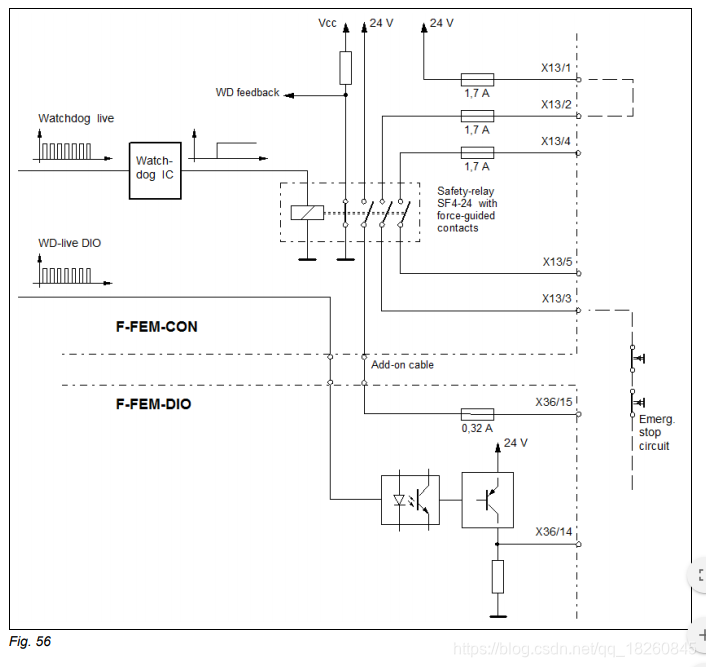
大概的意思是通过这个模块可以监控其他模块的某些动作是否真正被执行了,然后可以接急停信号
4.12 PIN脚定义
4.12.1 PIN脚定义
F-FEM-CON Front view
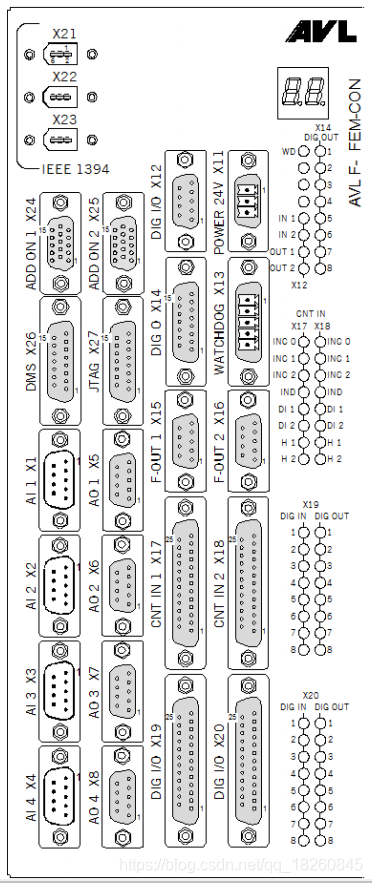
F-FEM-CON Advanced Front view
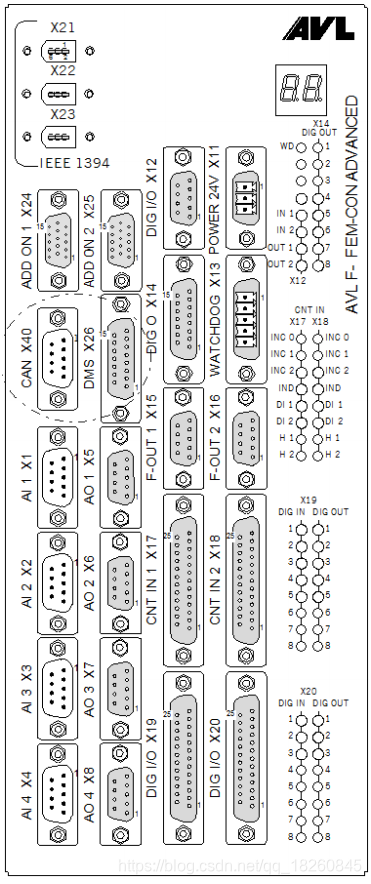
//后面详细的PIN脚定义看原文吧

















 4467
4467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









