




 本文介绍了如何在RT-Thread操作系统中使用MPU6050传感器,通过IIC通信获取数据。详细讲解了MPU6050的基本功能、硬件连接、软件包使用以及DMP库的移植和数据解算。通过实例展示了如何注册IIC设备、初始化MPU6050以及获取并解析六轴数据。
本文介绍了如何在RT-Thread操作系统中使用MPU6050传感器,通过IIC通信获取数据。详细讲解了MPU6050的基本功能、硬件连接、软件包使用以及DMP库的移植和数据解算。通过实例展示了如何注册IIC设备、初始化MPU6050以及获取并解析六轴数据。
小伙伴们大家好,好久不更新RT-Thread实战笔记啦,今天来搞一搞MPU6050,话不多说,淦!
本章源码获取
欢迎文末留言区或者公众号后台回复“MPU6050”即可获取本教程源码
MPU6050简介
某宝买的,吃灰许久了...
有钱,不想受那鸟气的,看这个,自己画一个,对比价格,我劝你买个吧,知道自己行就行了...
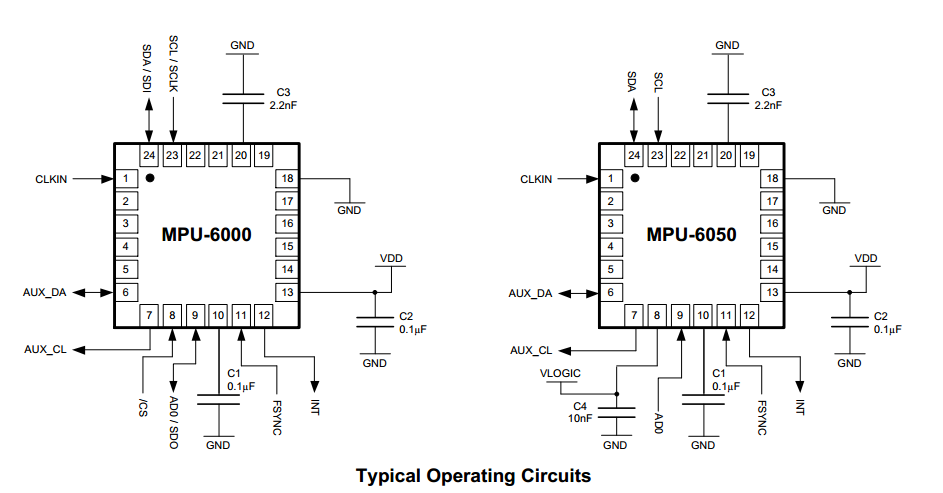
典型用法:
可在官网下载最新的芯片手册和寄存器映射和描述,参看:MPU6050 官网

基本功能:
MPU-60X0是世界上第一款集成 6 轴MotionTracking设备。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器 DMP( DigitalMotion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其 I2C或SPI接口输出一个9轴的信号( SPI接口仅在MPU-6000可用)。 MPU-60X0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。
MPU-60X0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250, ±500, ±1000, ±2000°/秒( dps),加速度计可测范围为±2, ±4,±8, ±16g。
一个片上1024字节的FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用 400kHz的 I2C接口或 1MHz的 SPI接口( SPI仅MPU-6000可用)。 对于需要高速传输的应用, 对寄存器的读取和中断可用 20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。芯片尺寸4×4×0.9mm,采用QFN封装(无引线方形封装),可承受最大 10000g的冲击,并有可编程的低通滤波器。
关于电源, MPU-60X0可支持 VDD范围 2.5V±5%, 3.0V±5%,或 3.3V±5%。另外MPU-6050还有一个 VLOGIC引脚,用来为 I2C输出提供逻辑电平。 VLOGIC电压可取1.8±5%或者VDD。
系统结构图:
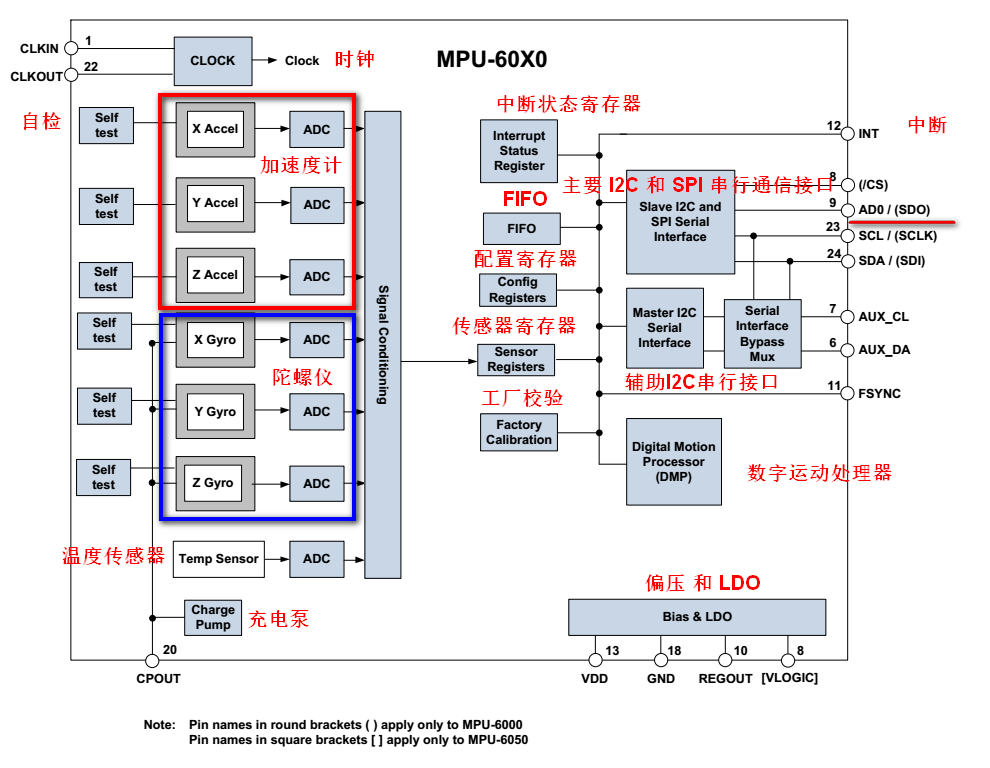
通信接口:
MPU-60X0使用 SPI(仅MPU-6000)或 I2C 串行通信至系统处理器接口。 与系统处理器通信时,MPU-60X0始终充当从属设备。 LSB的 I2C 从地址的地址由引脚9(AD0)设置(一般接地),本次采用的是IIC的通讯方式,顺便学习一下rt-thread的IIC设备驱动。
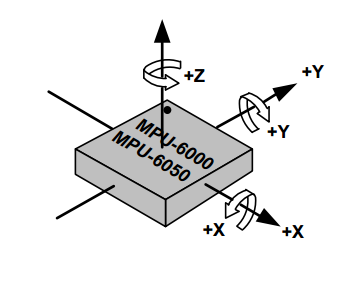
六轴,代表的是它内置了一个三轴 MEMS 陀螺仪、一个三轴 MEMS 加速度计,一个数字运动处理引擎(DMP)。它还有用于第三方的数字传感器接口的辅助 I2C 串行接口,比如当辅助 I2C 串行接口连接到一个三轴磁力计,MPU6050 能提供一个完整的九轴融合输出到其主 I2C 端口。
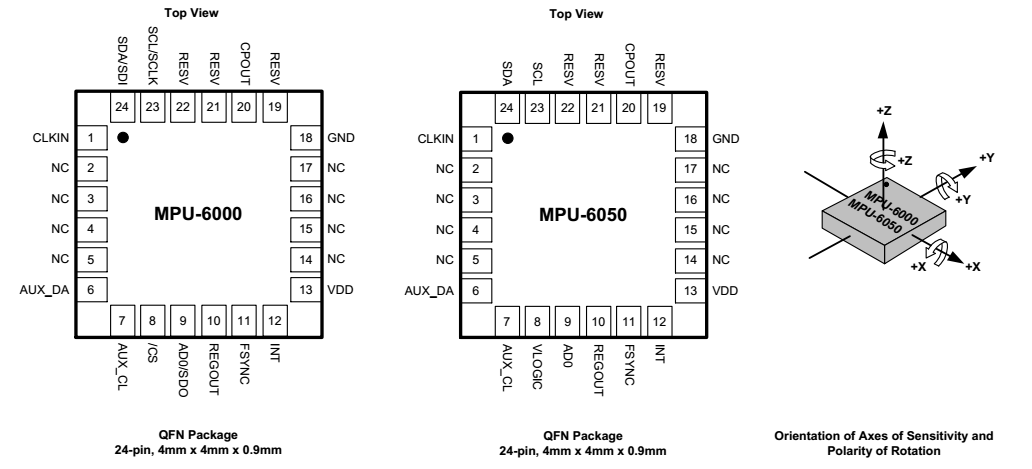
下图标明了传感器的参考坐标系( XYZ组成右手系)以及 3个测量轴和旋转方向。
旋转的正向可用右手螺旋定则判断
数字运动处理器(DMP):
DMP就是MPU6050内部的运动引擎,全称Digital Motion Processor,直接输出四元数,可以减轻外围微处理器的工作负担且避免了繁琐的滤波和数据融合。Motion Driver是Invensense针对其运动传感器的软件包,并非全部开源,核心的算法部分是针对ARM处理器和MSP430处理器编译成了静态链接库,适用于MPU6050、MPU6500、MPU9150、MPU9250等传感器。
FIFO
MPU-60X0包含一个可通过串行接口访问的1024字节FIFO寄存器。 FIFO配置寄存器决定哪个数据写入FIFO。 可能的选择包括陀螺仪数据,加速计数据,温度读数,辅助传感器读数和 FSYNC 输入。 FIFO 计数器跟踪 FIFO 中包含的有效数据字节数。 FIFO寄存器支持突发读取。 中断功能可用于确定新数据何时可用。
MPU6050的涉及的东西还是很多的,小飞哥也只是简单了解了一些,小伙伴们可以查看手册或者百度,很多优秀的介绍,就不再啰嗦啦
rt-thread软件包使用
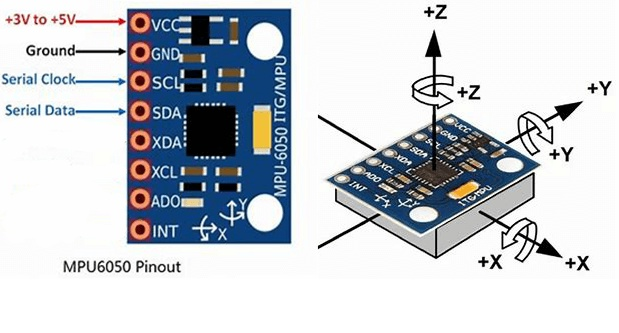
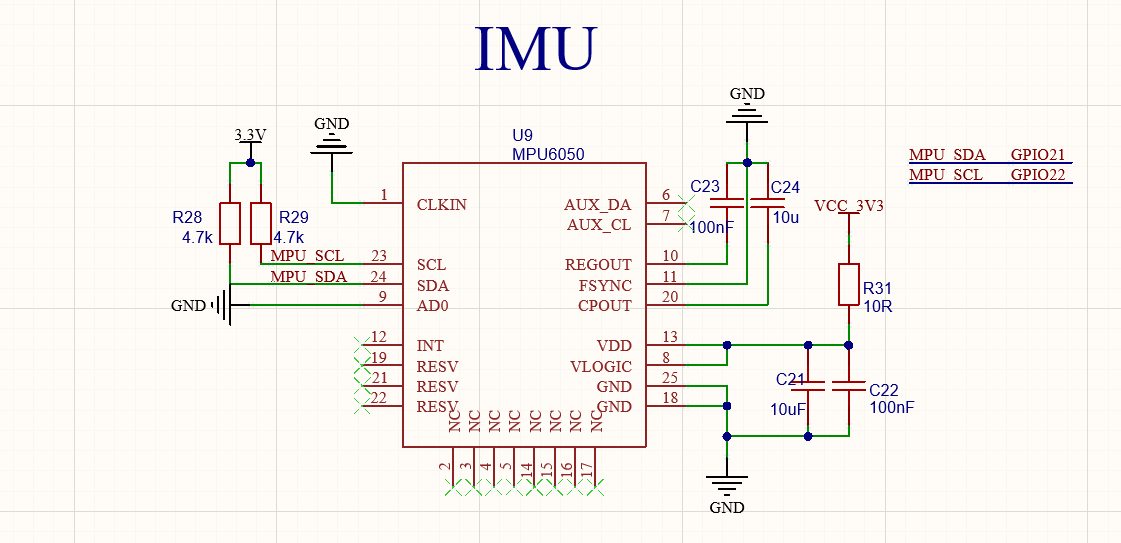
硬件连接
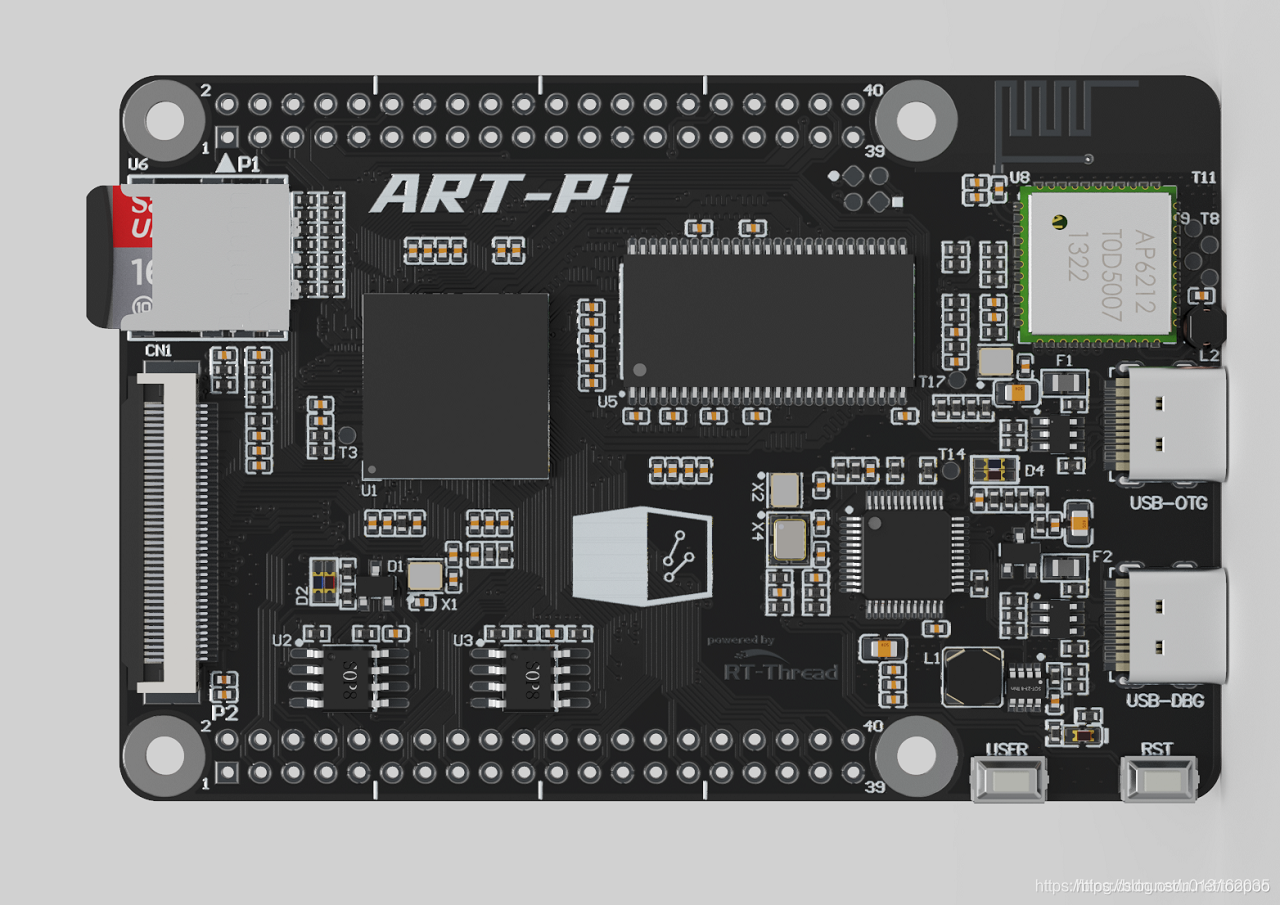
小飞哥使用的是ART-PI及ART-PI扩展板(12月份即将开源发布)
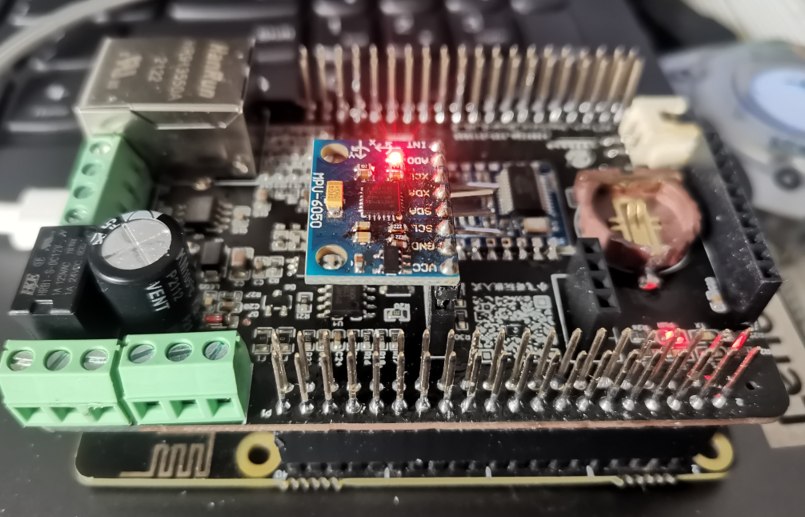
使用到的引脚为:
| MCU | MPU6050 |
|---|---|
| 3.3V | VCC |
| GND | GND |
| PI2 | SDA |
| PI1 | SCL |
小伙伴们可以还根据自己的MCU及使用到的引脚,模拟的IIC,自己看着选就可以啦
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 8395
8395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











