







官网上下载的加固模板,比如我想自己把我原有的网站加固,那怎么加固,很多用户都不明白,所以今天来给大家讲讲,我们的织梦模板怎么把它变成加固版,大家加固之前最好把原来的网站备份一下,以免操作错误造成损失。
第一步:登录网站后台把我们的网站备份数据库
网站后台点击 “系统”—“数据库备份/还原”—“提交”(如图):

这一步相信大家都是比较熟悉了,点击“提交”后等待它提示备份完成即可。
备份完成后,我们就可以把我们的网站打包下载到本地进行加固安装了。
第二步:打开install 文件夹,把index.html和install_lock.txt 删除,index.php.bak和module-install.php.bak文件改名成 index.php和module-install.php(就是把.bak后缀删除)(如图):

模板二次安装都会需要进行此步骤。
第三步:做完第二步后就下载织梦58加固版升级包,加固版织梦升级包,解压出来你会看到三个文件夹(如图):
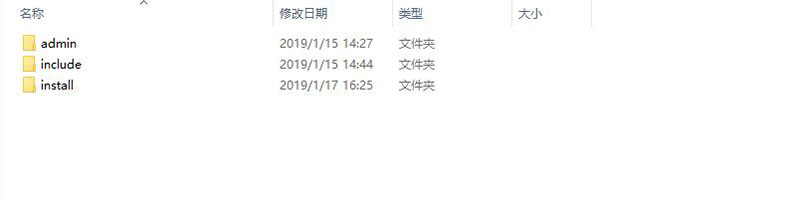
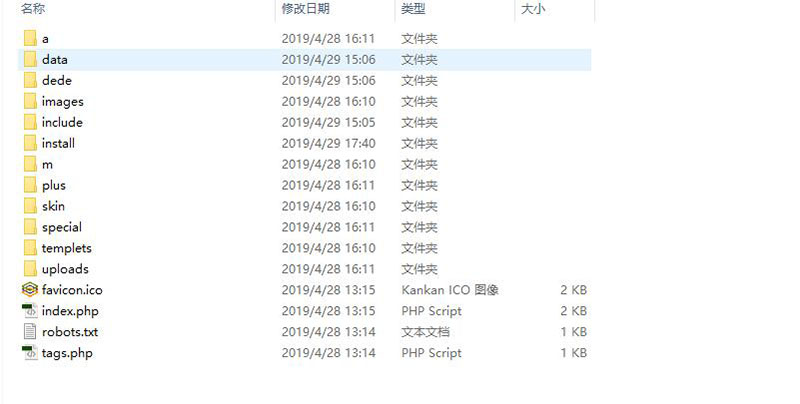
然后复制这三个文件夹覆盖到你程序的根目录,就是如下图的这一层目录:
第四步:覆盖后输入域名/install 进行正常安装,安装这里我就不多说了
按照上面的安装教程进行正常安装,再还原数据库后,登录后台你的模板就是加固版的了,加固版后台地址是域名/admin 账号密码都是默认的admin,加固后如果后台有提示升级,请大家点击升级,因为有漏洞修复我们都会更新,所以大家都要更新到最新版本。
其实模板加固就是这么简单,只要你熟悉织梦的安装流程,加固版也就是覆盖后重新安装还原而已,我们上面说的是针对你已经有网站上线了但不是加固版,想把网站加固的方法,但如果是这种情况,比如你从织梦58下载的模板,模板又不是加固的,你想自己加固再使用,这种加固的方法更简单了,直接从第三步开始做就可以了,也就是直接下载织梦加固版升级包覆盖到你下载的模板上去,再进行正常的安装再还原,就是加固版了。
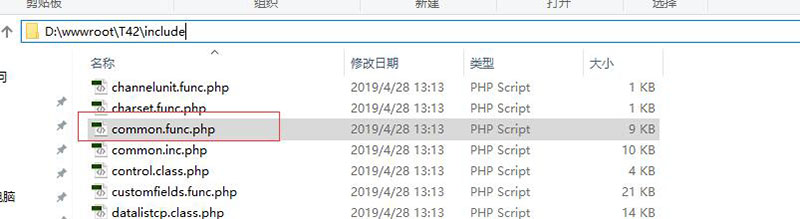
第五步:加固好后,在后台生成,看能否正常生成,可能有个别很少部分的会生成时生成不了显示空白,这时你要对比以下这两个文件:1、include/common.func.php(如图):
2、Include/helpers/extend.helper.php(如图):
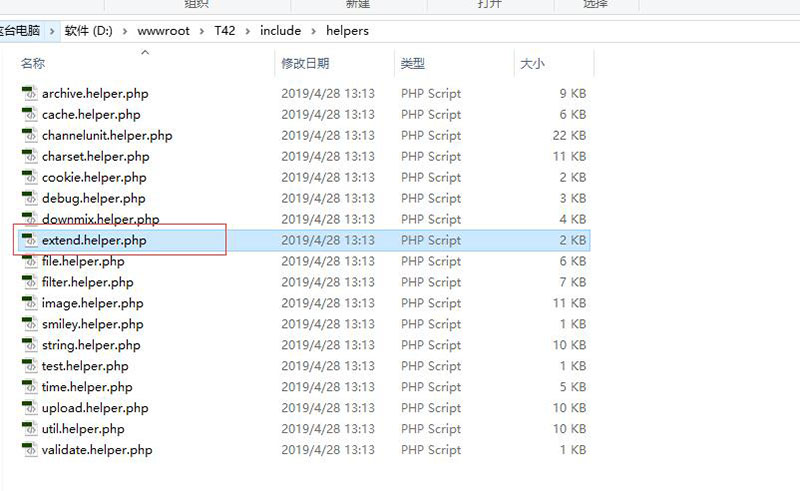
分别把加固后(即不能生成)的这两个文件和未加固之前(即能生成)的这两个文件对比,要同名对比,即common.func.php对common.func.php,extend.helper.php对extend.helper.php,
一般不同都是在文件的底部,把未加固之前common.func.php 多出来不同的那些代码复制粘贴到加固后common.func.php上面,粘贴位置按照未加固那边的位置粘贴,一般粘贴在最下面就可以,extend.helper.php也是同理,一般这两个文件只是有一个不同而已,改其中一
个大多数都就可以生成了,为什么要说这一步,因为有写模板调用顶级栏目标签时,需要小的二次开发,如果没有这第五步就可以忽略不看,就是说你在后台能正常生成,那这一步你就不用管了。
第六步:全部生成后,(如图):

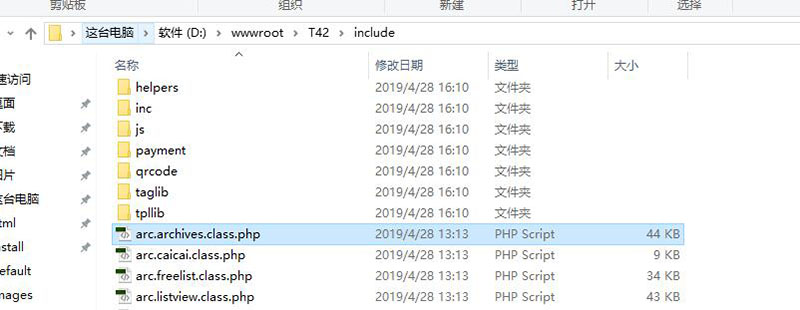
打开前端页面,看你的列表也分页和内页的上下篇正不正常,如果分页乱了,或者上下篇乱了,也是需要对比相应的php的,分页的php文件是:include/ arc.listview.class.php(如图)
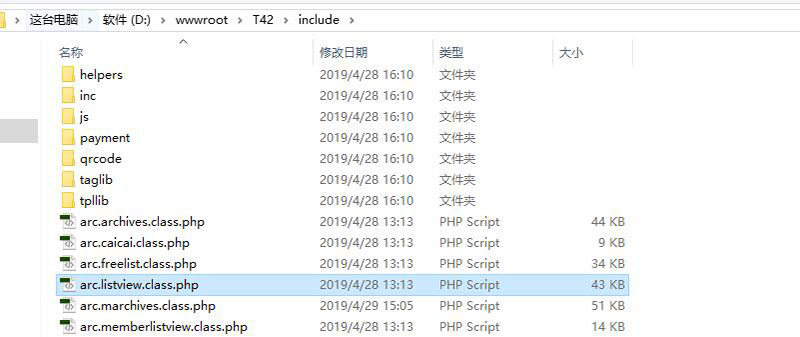
上下篇的php文件是:include/ arc.archives.class.php(如图):
对比的方法和第五步的差不多,就是打开未加固的和加固后的这两个文件有什么不同。
可能这两步稍微有点复杂,对于很小白的来说可能有点困难,多想想就好了。
如果你加固后,能正常生成,前端页面分页和上下篇也正常,那这第五步和第六步你就可以
忽略不用去管它。
最后我们就可以把我们原来的后台删掉了,也就是dede这个文件夹(如图):
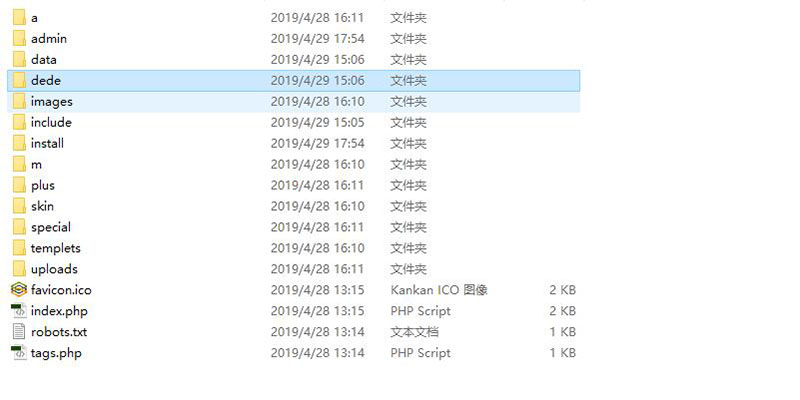
如果dede文件夹被你改名了,就把相应的删掉就可以,加固版默认的后台是admin,你也可以把 admin 文件夹改名成你想要的名称。
说了那么多,也怕大家还是不明白,其实你熟悉织梦的安装,那加固对于你来说就是很简单,就是把加固的升级文件覆盖,再次安装而已。教程哪里写的不明白的希望大家多多反馈,谢谢!


















 4103
4103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











