






 本文介绍如何使用ROS系统启动小海龟仿真界面,并通过键盘控制其运动。文章详细讲解了启动rosmaster、运行仿真节点及键盘控制指令的步骤。
本文介绍如何使用ROS系统启动小海龟仿真界面,并通过键盘控制其运动。文章详细讲解了启动rosmaster、运行仿真节点及键盘控制指令的步骤。
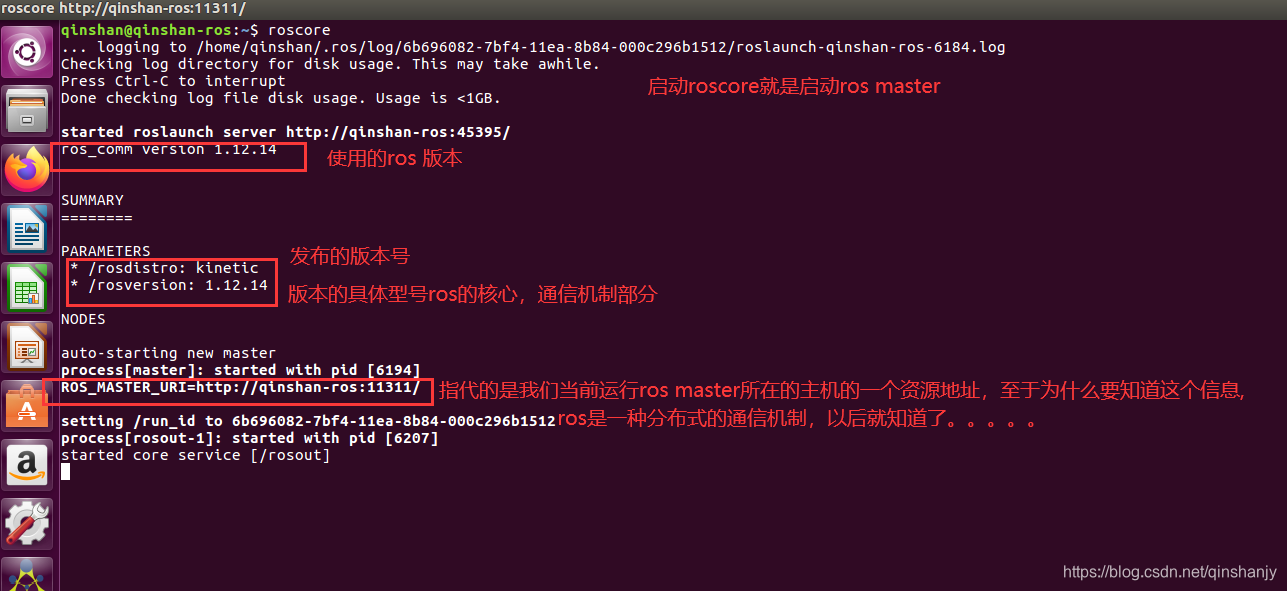
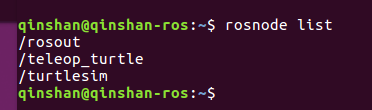
输入以下命令:启动ros master
roscore
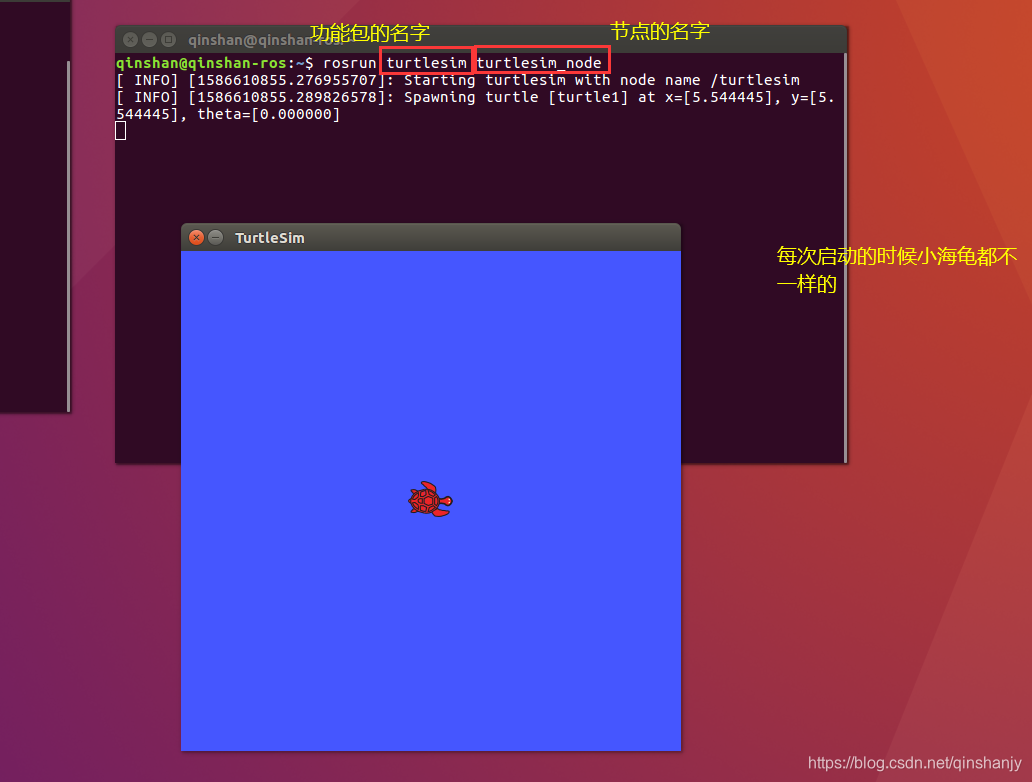
输入以下命令:启动小海龟仿真界面
rosrun turtlesim turtlesim_node
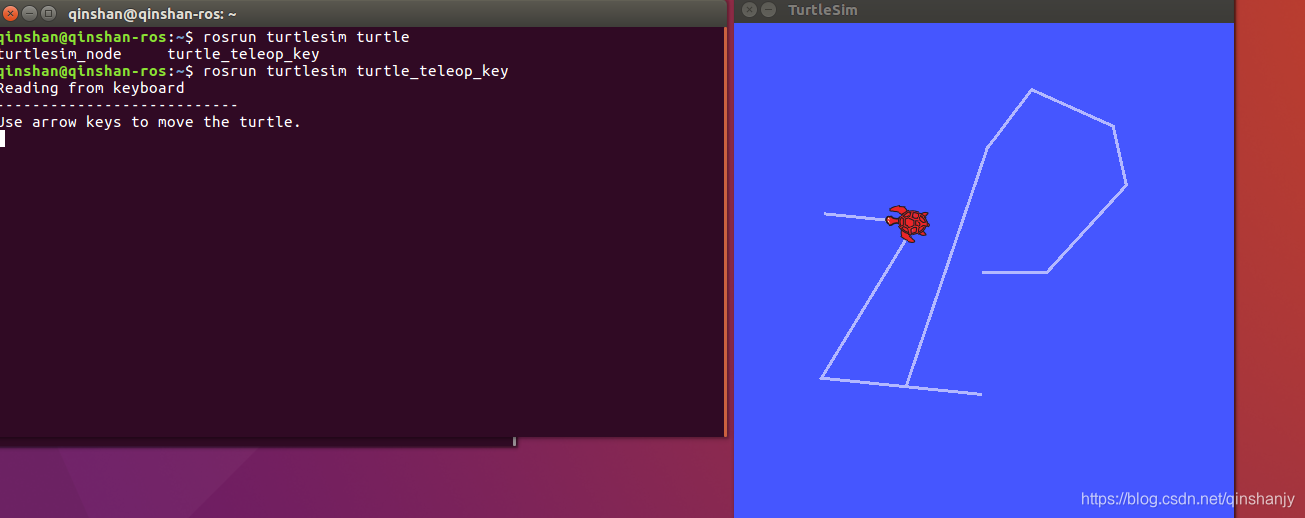
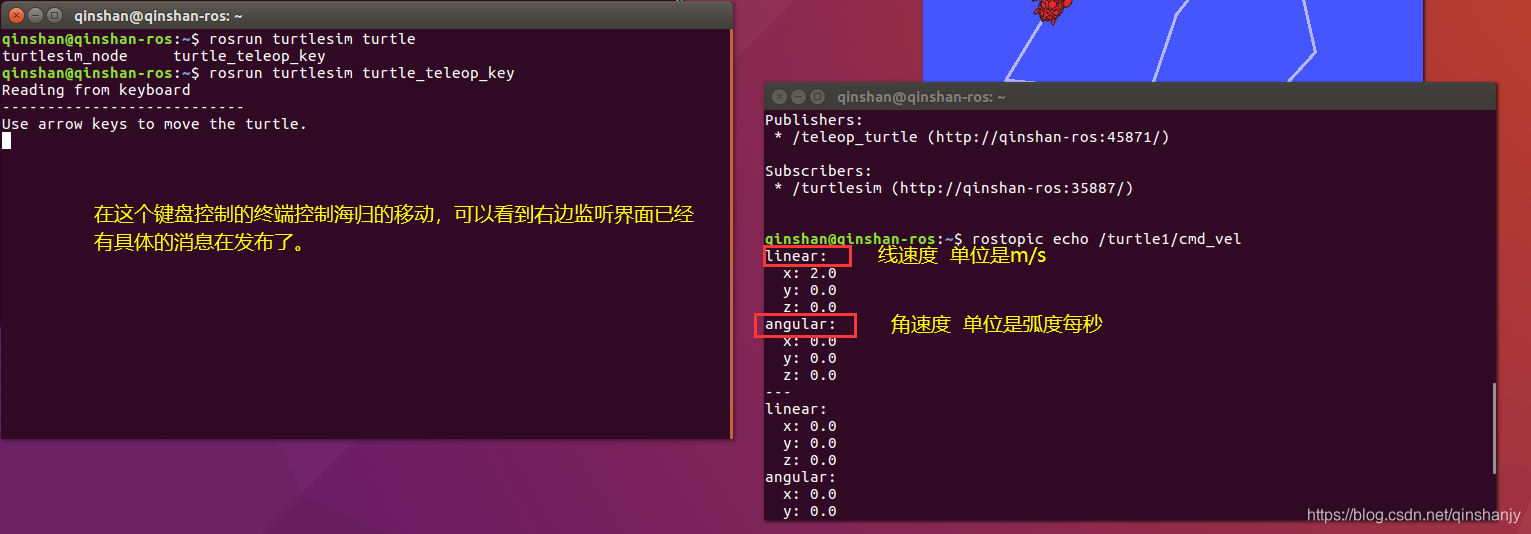
输入以下命令:启动键盘控制小海龟运动
rosrun turtlesim turtle_teleop_key
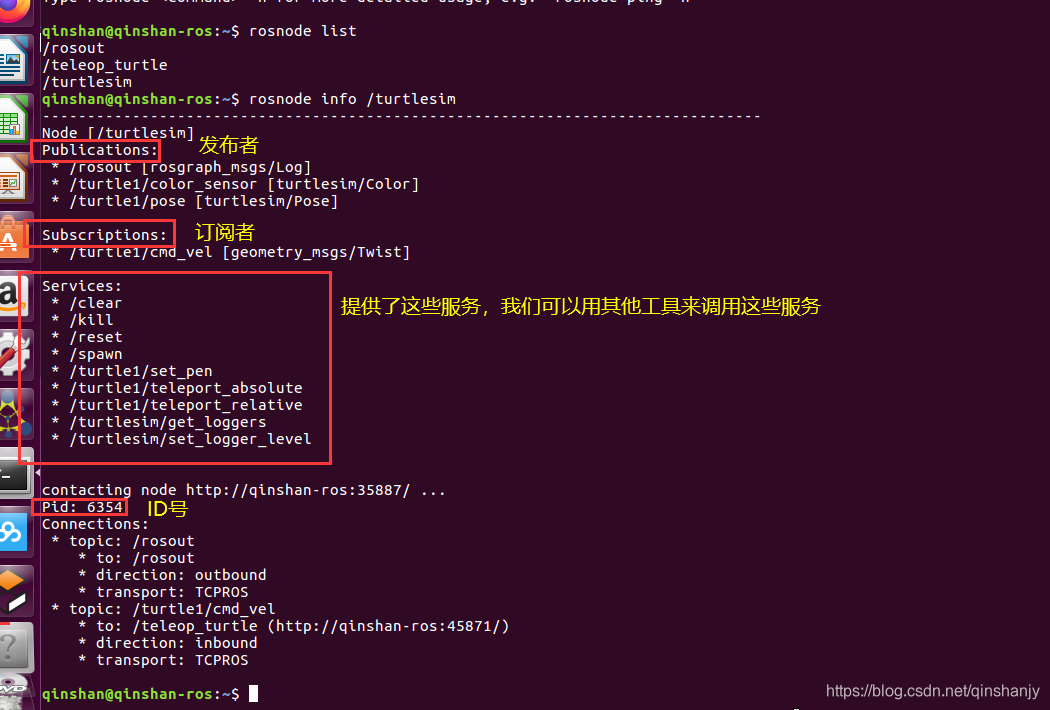
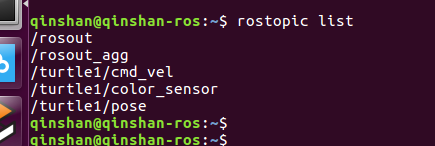
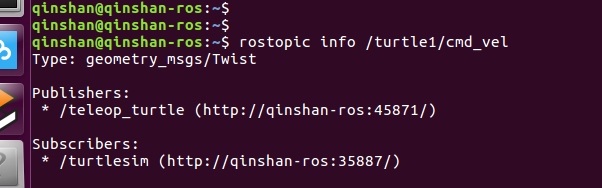
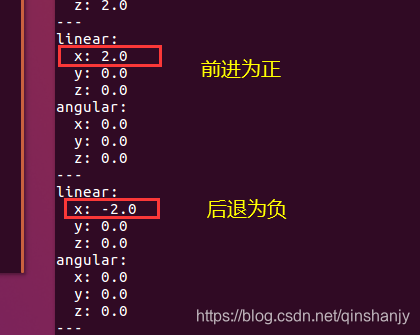
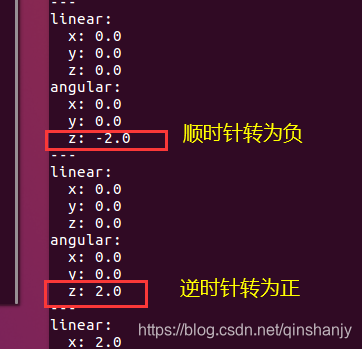
监听话题的具体内容 echo 命令

一开始并没有什么变化,但是发布消息以后
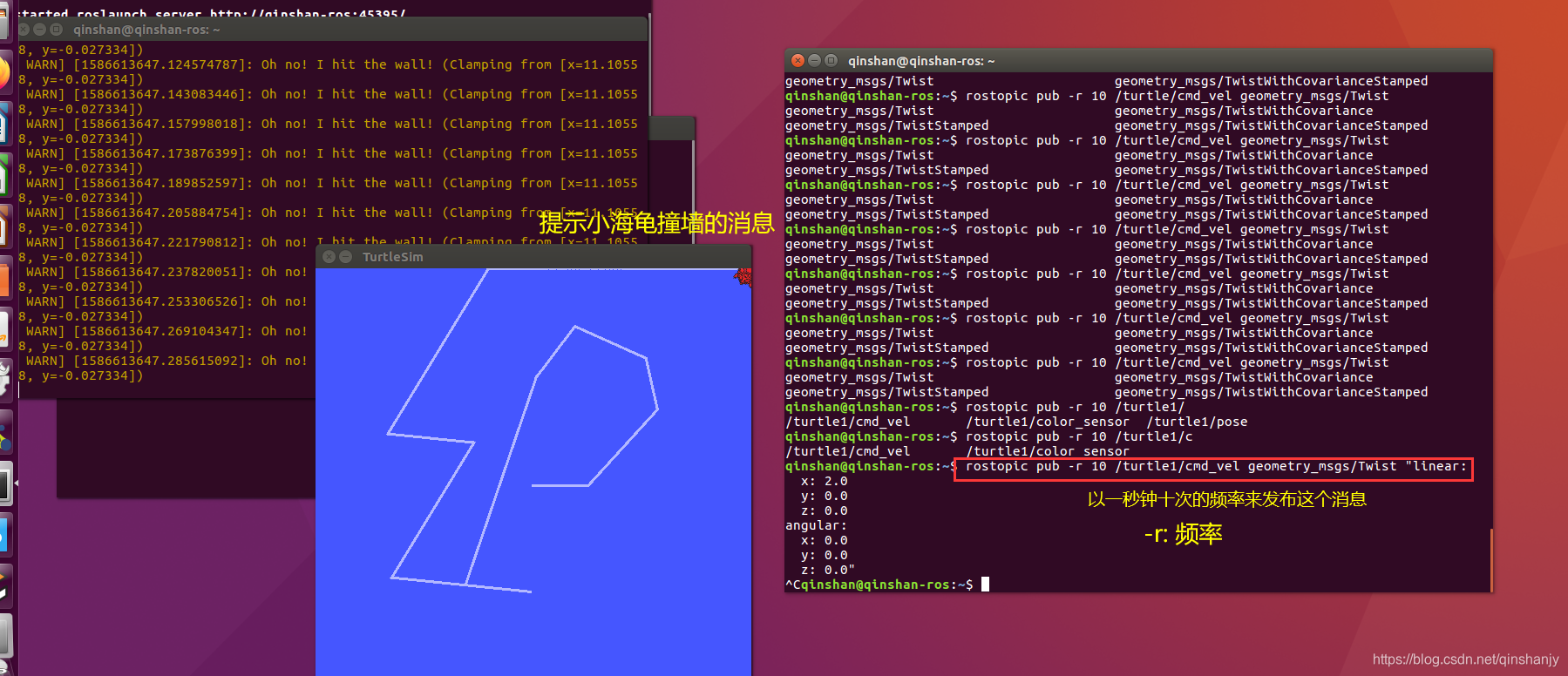
自己来发布一个测试消息``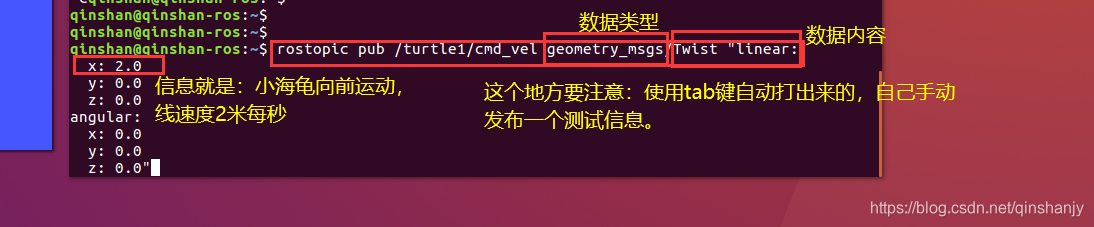
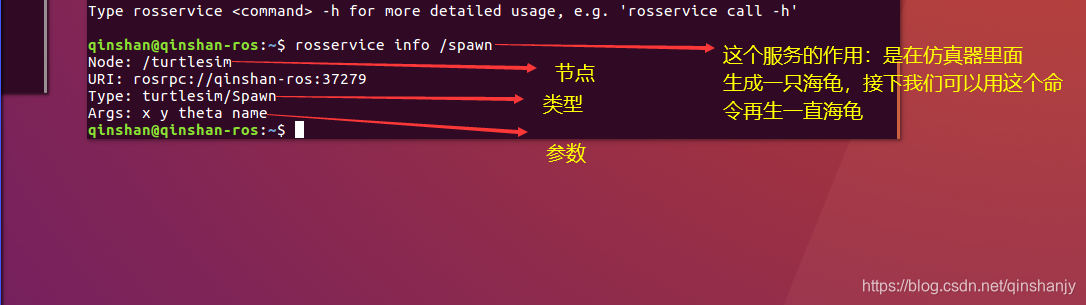
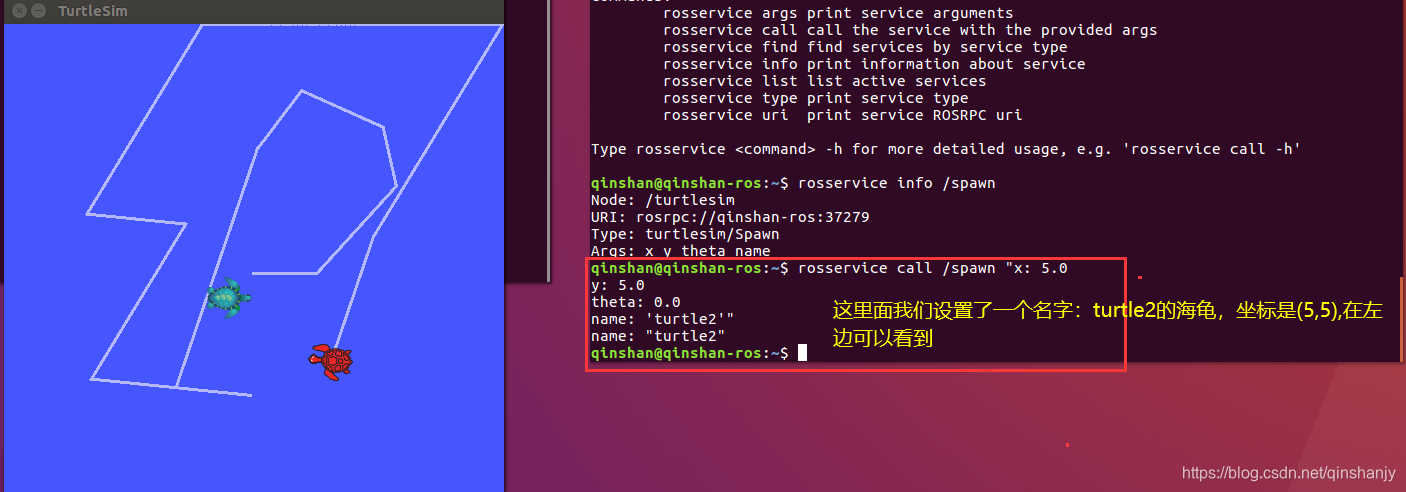
k查看服务列表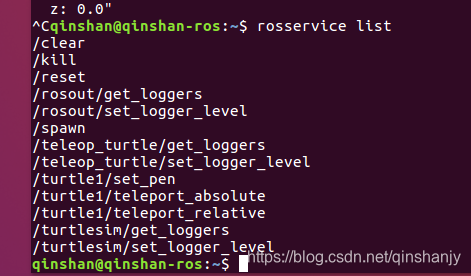
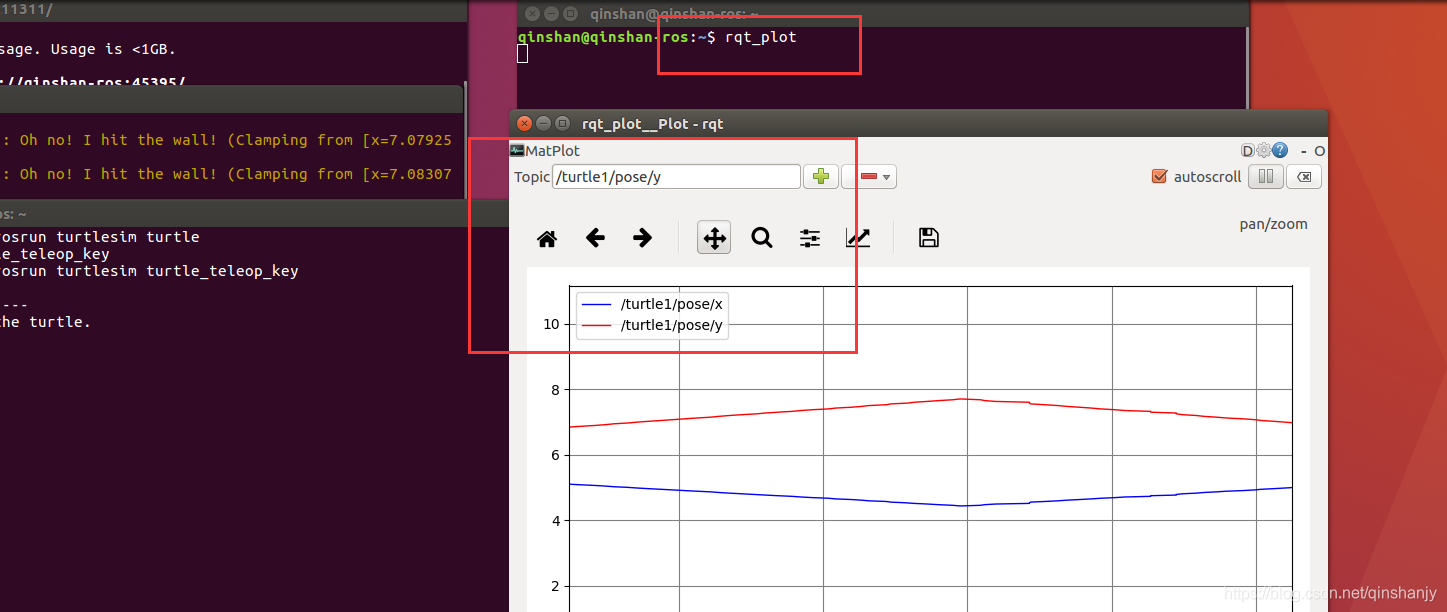
一些数据通过曲线的形式绘制出来
输入以下命令:启动ros master
roscore
输入以下命令:启动小海龟仿真界面
rosrun turtlesim turtlesim_node
输入以下命令:启动键盘控制小海龟运动
rosrun turtlesim turtle_teleop_key
监听话题的具体内容 echo 命令
一开始并没有什么变化,但是发布消息以后
自己来发布一个测试消息``
k查看服务列表
一些数据通过曲线的形式绘制出来

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























