










之前小结关注的是无人车的定位问题,从本小节开始关注的是建图问题,最关键的在于找到前后帧图像的同名点,一种可行的办法是找到前后帧图像的同名要素,比如如何确定前后两帧的标牌是同一个标牌,这就用到了跟踪预测的方法,opencv自带了许多跟踪方法,比如KCF Tracker、CSRT Tracker等,我实验了许多方法,发现都不是很好,总有跟丢的情况,最后采用的是跟踪算法与匈牙利算法相结合的办法,跟踪算法采用的是DSST所述的方法:
1、对第一帧标牌建立跟踪器
2、对新一帧图像跟踪器更新位置,并与新帧的目标检测结果根据匈牙利算法建立匹配关系
3、如果匹配成功,则用新帧的目标检测更新跟踪器的位置
4、如果匹配失败,如新帧的目标检测结果没有跟踪器与其匹配,则建立新的跟踪器,如跟踪器没有新帧的目标检测与其匹配,则跟踪失败,放入已跟踪结束列表。
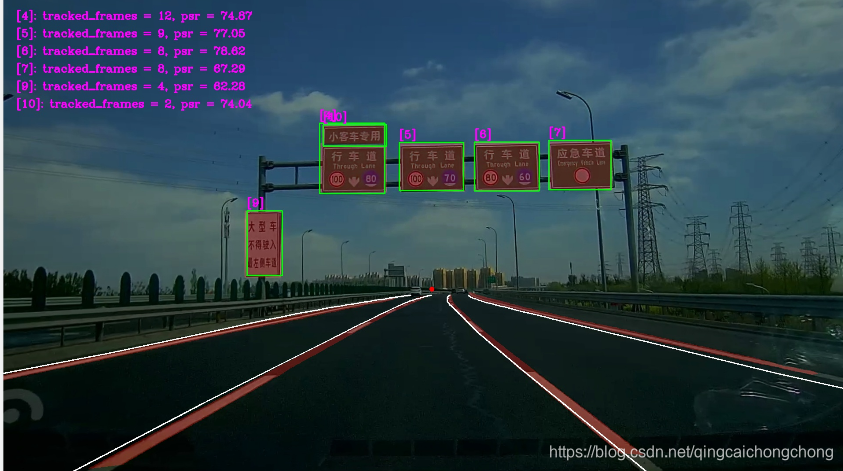
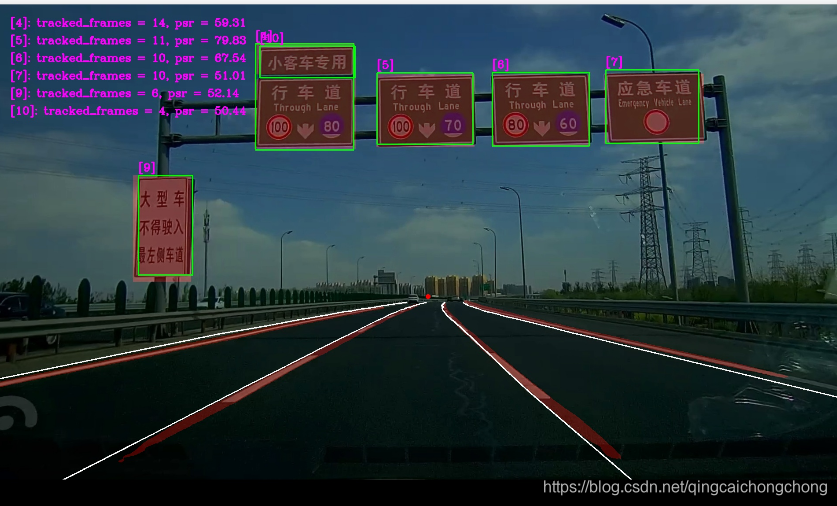
下图是以编号显示的跟踪结果,跟踪结束后,已跟踪列表里记录的就是不同帧的同一个标牌,就可以用来做三角量测啦。



















 984
984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











