



我们公司的ERP对内使用,有一些内部的业务群,每次更新时需要通知到业务。
实现方式:通过钉钉机器人发送
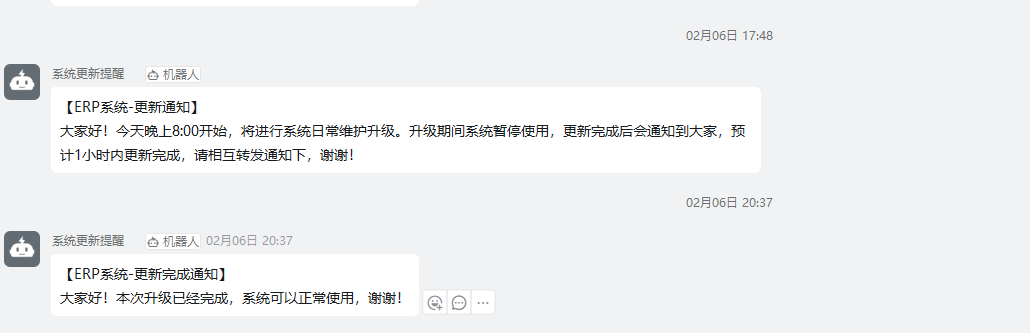
日常更新-文字版的推送形式
钉钉请求:
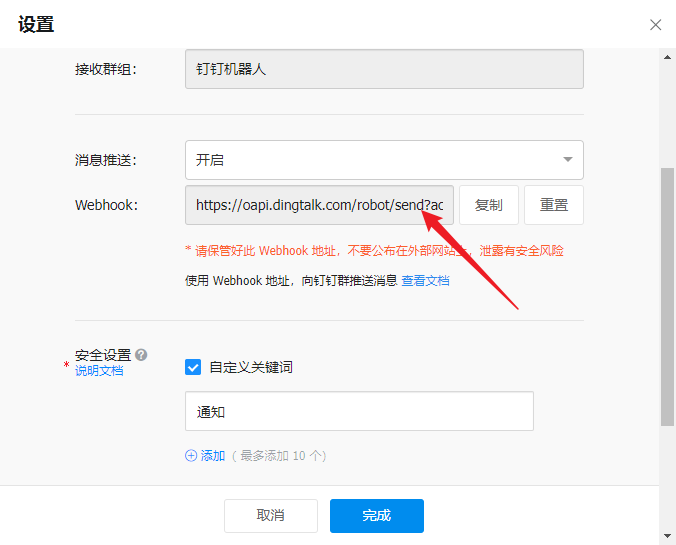
请求URL:钉钉机器人的Webhook地址
请求JSON:
isAtAll:为true 推送时艾特全员,为false 推送时不艾特全员
艾特全员时,电脑右下角会出现弹窗
{
"at": {
"isAtAll": false
},
"text": {
"content":"【ERP系统-更新通知】\n大家好!今天晚上8:00开始,将进行系统日常维护升级。升级期间系统暂停使用,更新完成后会通知到大家,预计1小时内更新完成,请相互转发通知下,谢谢!"
},
"msgtype":"text"
}
安全设置:选择自定义关键词:通知
示例:
大的停机公告:
停机维护-图文版的推送形式
{
"msgtype": "markdown",
"markdown": {
"title": "关于本周五晚ERP即将停机维护通知",
"text": "#### 亲爱的小伙伴: 我们将于2025年4月25日(本周五)20:00-02:00,进行ERP系统的停机维护 ❗ \n > \n > \n > ###### 点击查看影响范围 ➡️ [停机维护公告详情](钉钉在线文档链接) \n"
},
"at": {
"isAtAll": true
}
}
示例:

可以直接复制图片地址


友好的提供下素材,仅供交流学习
图片非原创,侵权联系我删除,仅供使用,无商业盈利

















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









