




目录
固件烧录
setenv bootargs 'mem=512M console=ttyAMA0,115200 clk_ignore_unused rw rootwait root=/dev/mmcblk0p3 rootfstype=ext4 blkdevparts=mmcblk0:1M(uboot.bin),9M(kernel),96M(rootfs.ext4),-(user)'
setenv bootcmd 'mmc read 0 0x80000000 800 4800; bootm 0x80000000'
saveenv
reset
setenv bootargs 'mem=512M console=ttyAMA0,115200 clk_ignore_unused rw rootwait root=/dev/mmcblk0p3 rootfstype=ext4 blkdevparts=mmcblk0:1M(uboot.bin),12M(kernel),120M(rootfs.ext4),-(user)'
setenv bootcmd 'mmc read 0 0x80000000 800 6000; bootm 0x80000000'
saveenv
reset
setenv bootargs 'mem=512M console=ttyAMA0,115200 clk_ignore_unused rw rootwait root=/dev/mmcblk0p3 rootfstype=ext4 blkdevparts=mmcblk0:1M(uboot.bin),20M(kernel),120M(rootfs.ext4),-(user)'
setenv bootcmd 'mmc read 0 0x80000000 800 A000; bootm 0x80000000'
saveenv
reset
setenv bootargs 'mem=512M console=ttyAMA0,115200 clk_ignore_unused rw rootwait root=/dev/mmcblk0p3 rootfstype=ext4 blkdevparts=mmcblk0:1M(uboot.bin),9M(kernel),2000M(rootfs.ext4),-(user)'
setenv bootcmd 'mmc read 0 0x80000000 800 4800; bootm 0x80000000'
saveenv
reset
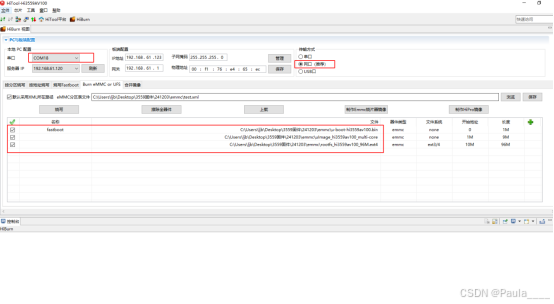
1、配置好HiTool烧录工具
需要注意长度必须不小于对应文件大小
2、开始烧录
先点击擦除全器件,重新给开发板上电,擦除成功后如下图所示。
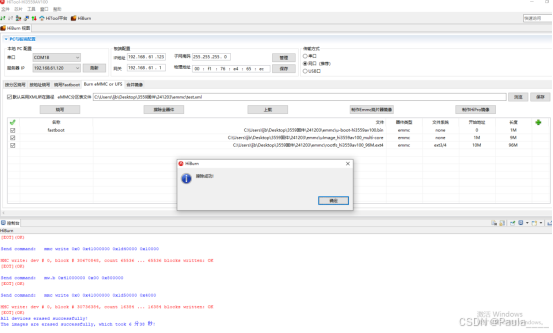
点击烧写,重新给开发板上电,开始烧录。
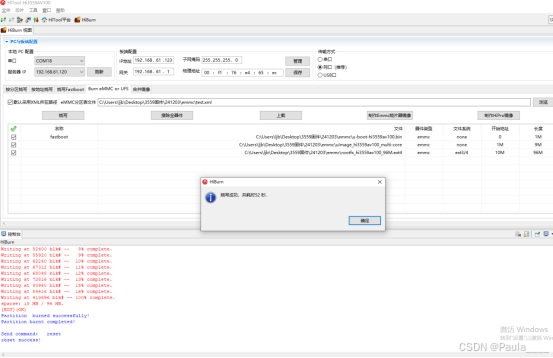
3、烧录完,进入uboot
打开putty.exe。点击回车,如下图所示,这说明已经停在uboot了。
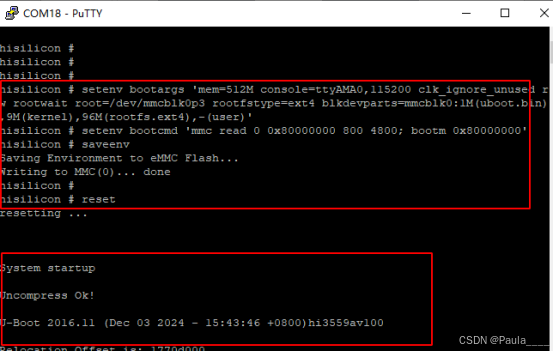
发送如下内容:
setenv bootargs ‘mem=512M console=ttyAMA0,115200 clk_ignore_unused rw rootwait root=/dev/mmcblk0p3 rootfstype=ext4 blkdevparts=mmcblk0:1M(uboot.bin),9M(kernel),96M(rootfs.ext4),-(user)’
setenv bootcmd ‘mmc read 0 0x80000000 800 4800; bootm 0x80000000’
saveenv
reset
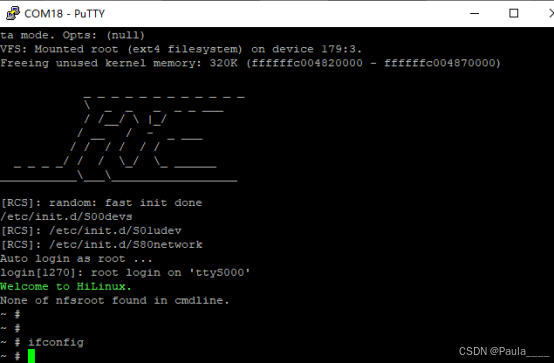
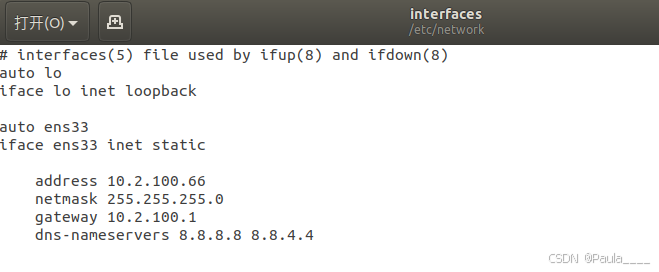
配置网络
修改虚拟机和开发板ip前,一定要先用windows测试ip是否已经有人使用,看是否可以ping通
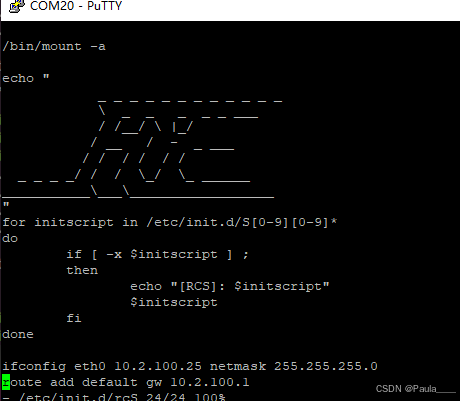
修改开发板ip步骤如下:

修改虚拟机ip如下:
nfs挂载虚拟机文件
虚拟机重启挂载服务
sudo service nfs-kernel-server restart

开发板挂载虚拟机的文件
mount -t nfs -o nolock 10.2.100.66:/home/ebaina/work/nfs /mnt/test

挂载成功
使用telnet连接开发板
开发板发送
telnetd&

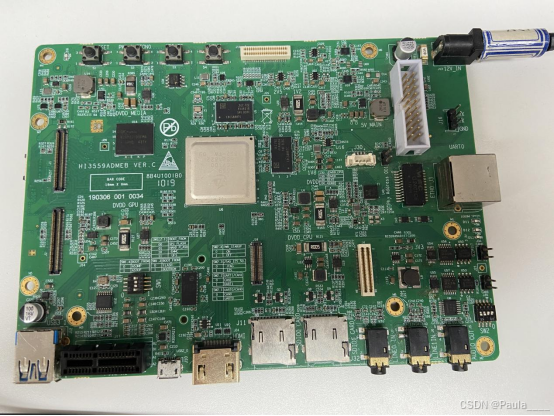
移植3403的OS08a20到3559a
-
驱动修改IIC的基础地址 及初版寄存器 (在imx334的基础上改)
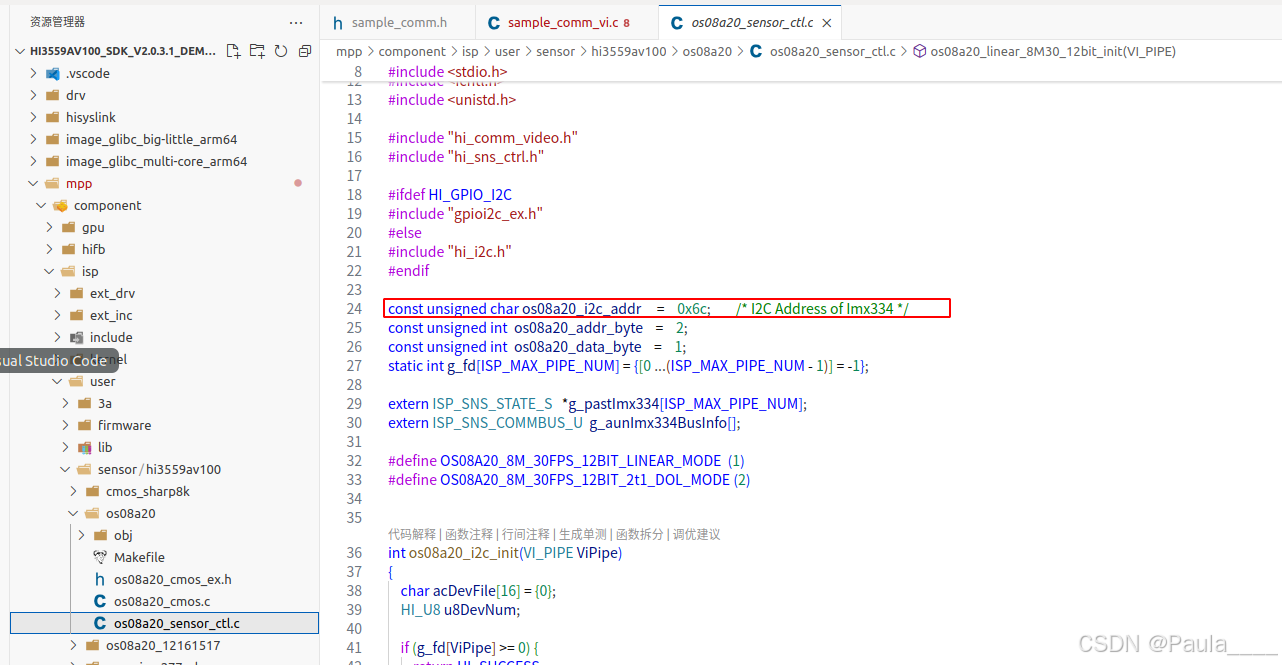
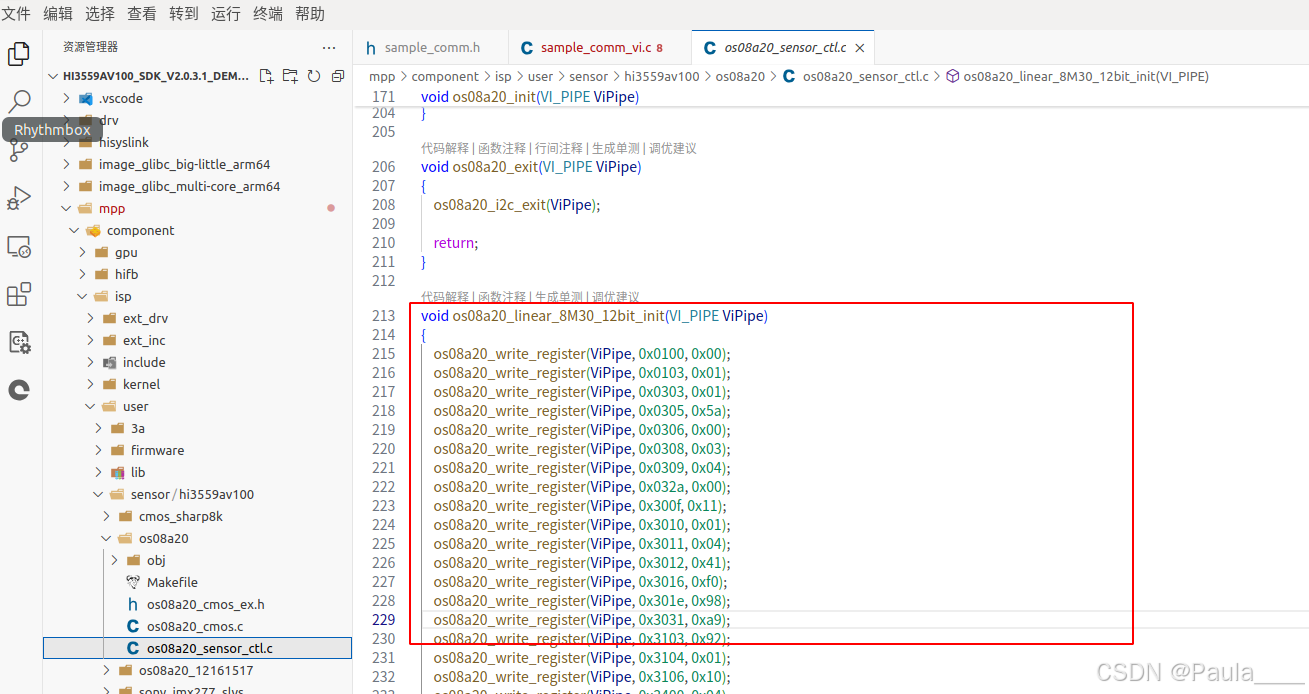
-
提供PQ板端执行程序
-
挂载编译后的驱动 cd /mnt/ko 调用
./load3559av100_multicore -a -sensor0 os08a20
开起来本质上调用底层驱动程序,并把对应入参信息变更为os08a20
-
调用PQ程序 进行驱动测试
Comment Description: sdk包里面有板端pqtool。
(1)将编译出来的sensor驱动so,放到pq的libs目录下,再仿造例如configs/imx334的ini文件,新建一个os08a20的文件夹,新建一个config_entry.ini,os08a20.ini里面的内容就先参考imx334的配置
(2)os08a20.ini中需要注意的SensorType SensorLibFile 配置成你自己的sensor名字。mipi_lane_id修改为你的硬件连接,看是几lane的。所有涉及分辨率的地方,全部修改为os08a20的分辨率。
(3)运行
./HiIspTool.sh -a os08a20 0
即可启动业务了。os08a20这个参数表示从configs/os08a20文件夹下去找config_entry.ini,参数0表示从加载mode0所设置的配置文件os08a20.ini。
~/work/Hi3559AV100_SDK_V2.0.3.1_demoboard/mpp/component/isp/user/sensor/hi3559av100/os08a20下make
然后
=================================================================
mount -t nfs -o nolock 10.2.100.66:/home/ebaina/work/nfs /mnt/test
./load3559av100_multicore -a -sensor0 os08a20
./HiIspTool.sh -a os08a20 0
cp ../../../lib/libsns_os08a20.so /home/ebaina/work/nfs/Hi3559AV100_PQ_V2.0.3.1/libs/
venc测试,保存视频文件到本目录怎么发指令
连接后 调用命令
echo 41 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio41/direction
echo 1 > /sys/class/gpio/gpio41/value
运行程序 ./sample_venc 0
注意:如果测试钱运行了PQtool软件,建议重启后进行测试此命令
PQtool程序,关闭后 没有释放总线
gpio41是怎么通过GPIO5_1得到的呢?
摄像头转接板上的SENSOR1_RSTN如图,对应66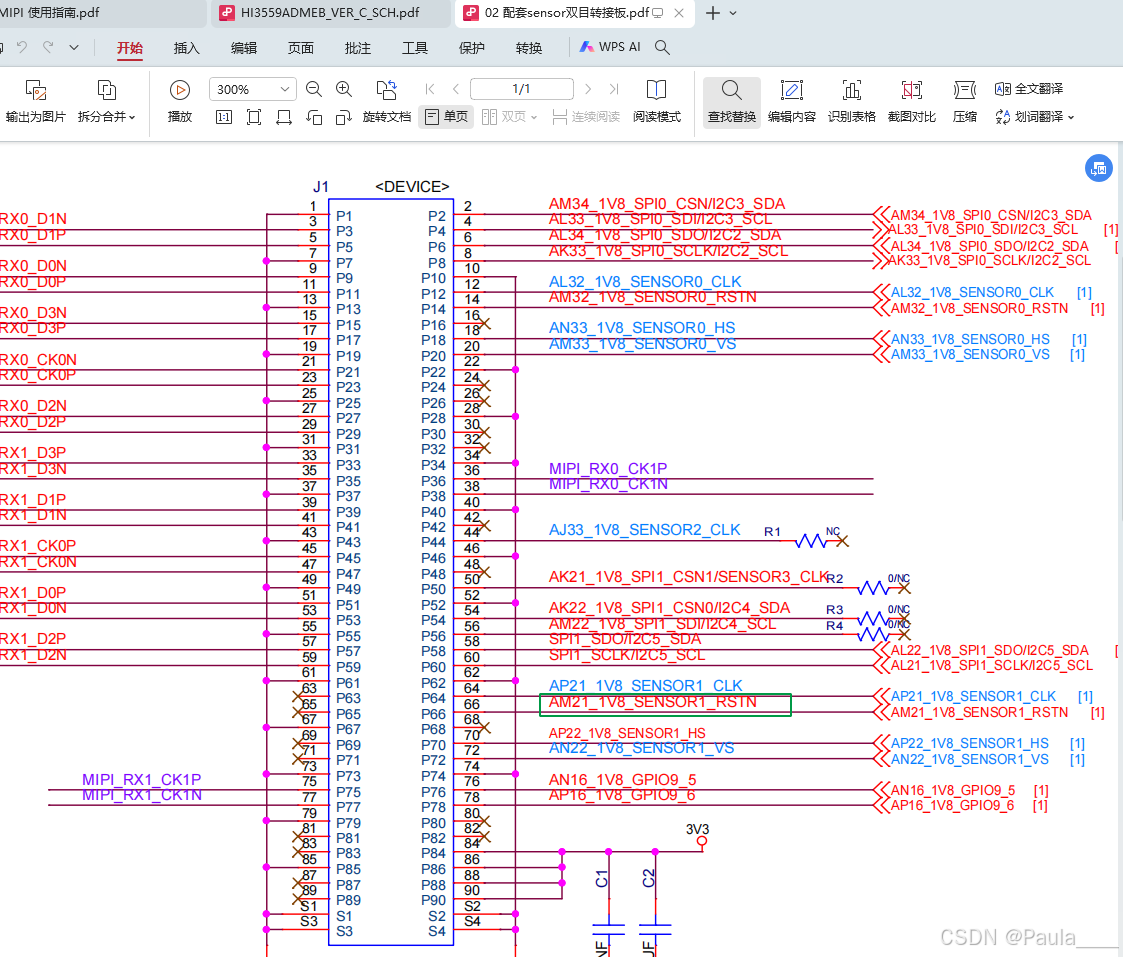
找到demo板原理图对应的位置,为SENSOR_RSTN1
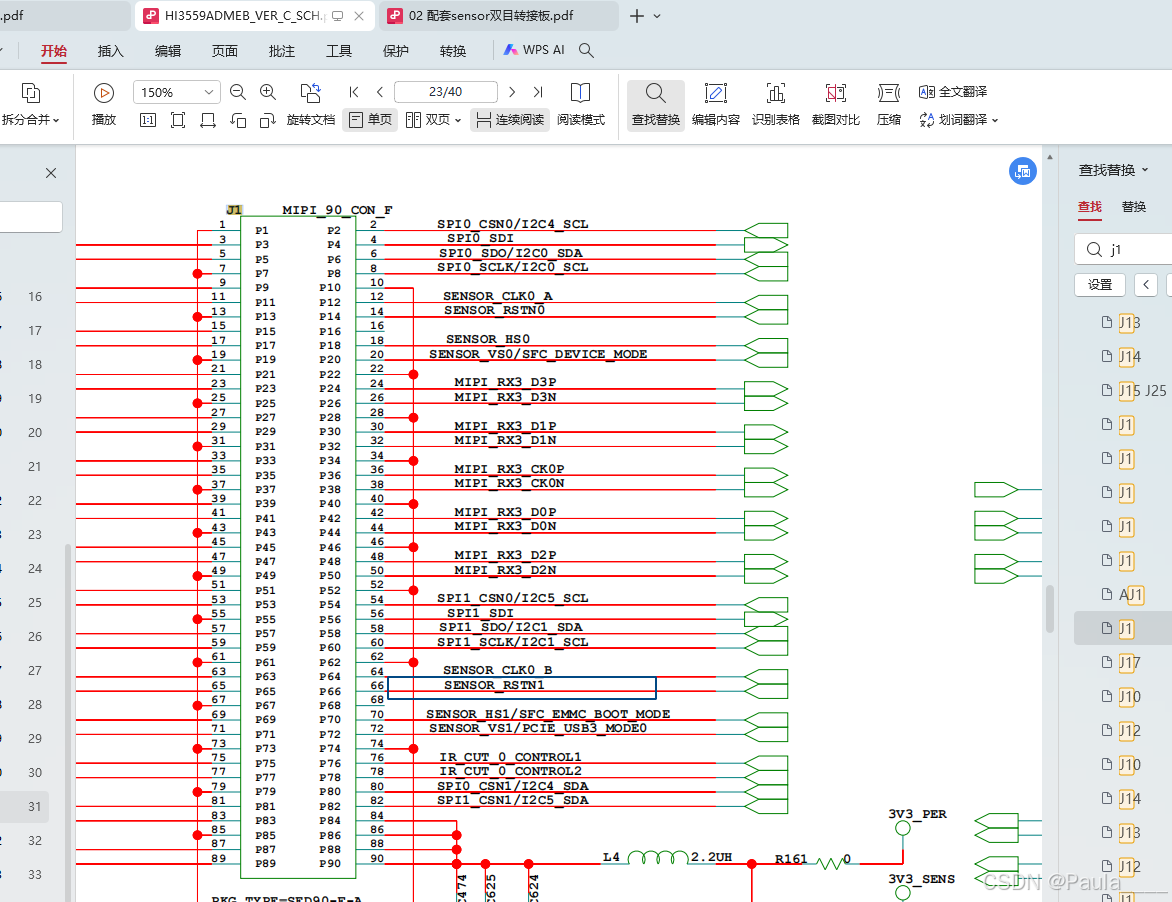
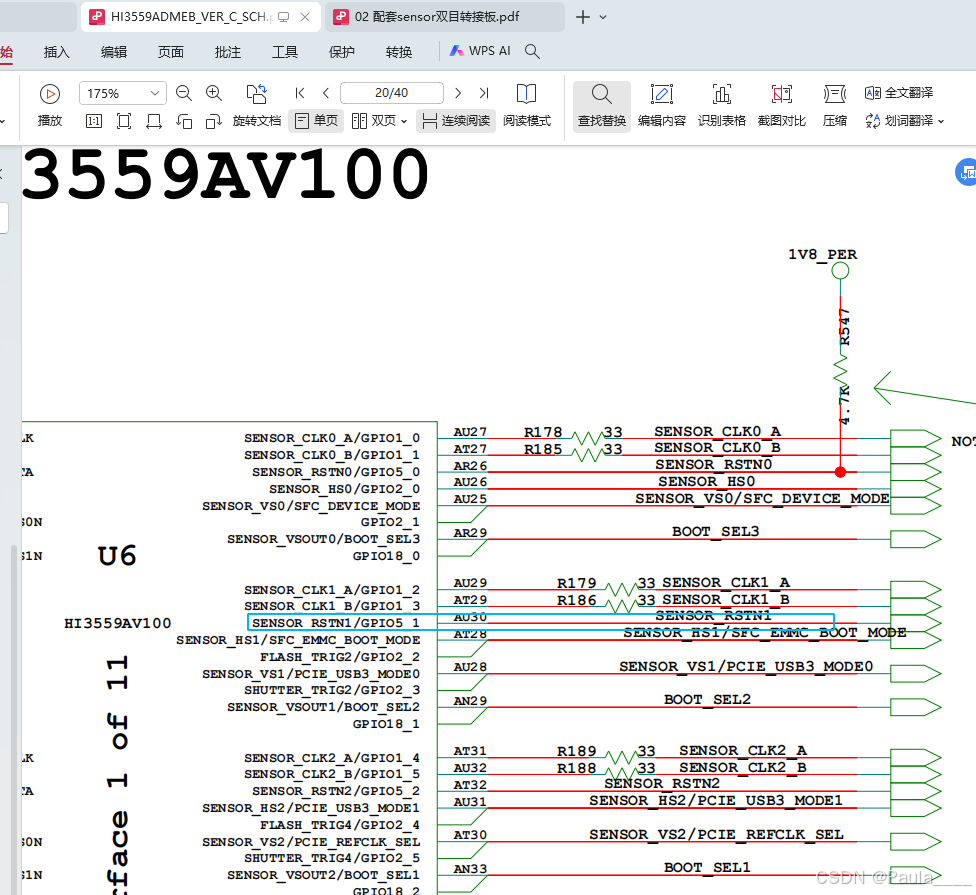
在demo板原理图中搜索SENSOR_RSTN1,对应核心芯片的GPIO5_1
GPIO5_1怎么计算呢?
一组gpio有8个,gpio0—gpio4,共计5*8=40,40+1=41
demo板–>核心板,如何确认使用哪路I2C,以及rest引脚
核心板上
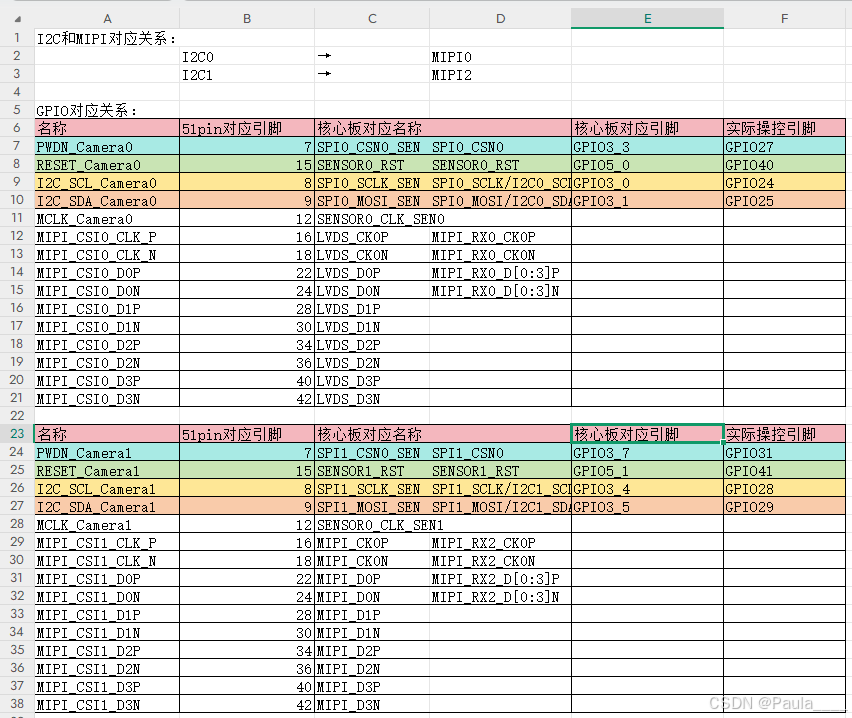
转接板上RESET_Camera1对应核心板上的SENSOR_RSTN,核心板上SENSOR_RSTN和GPIO的对应关系如下:
SENSOR_RSTN0–>GPIO5_0 = GPIO40
SENSOR_RSTN1–>GPIO5_1 = GPIO41,着重看这个
SENSOR_RSTN2–>GPIO5_2 = GPIO42
SENSOR_RSTN3–>GPIO5_3 = GPIO43
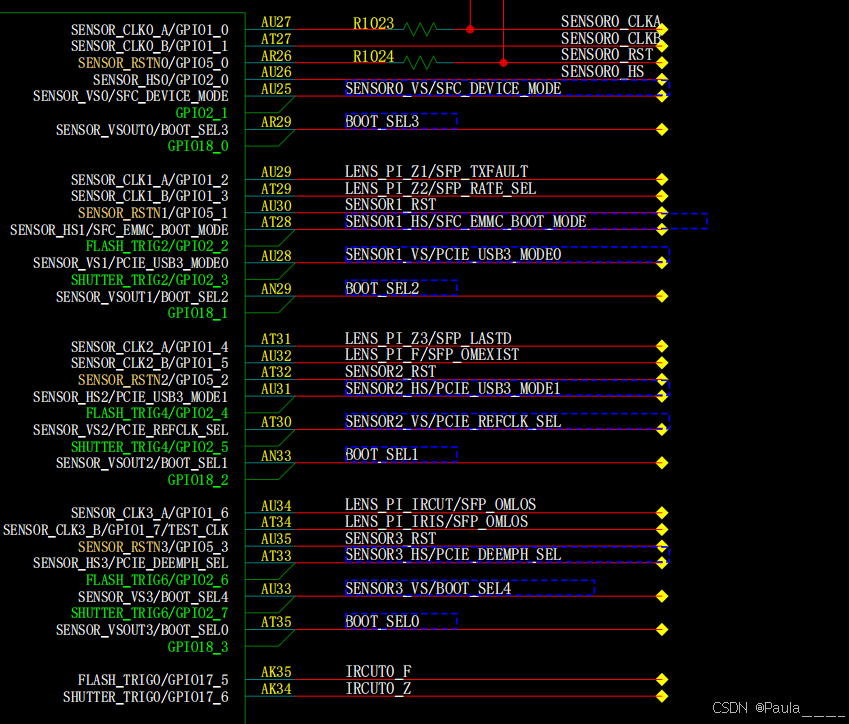
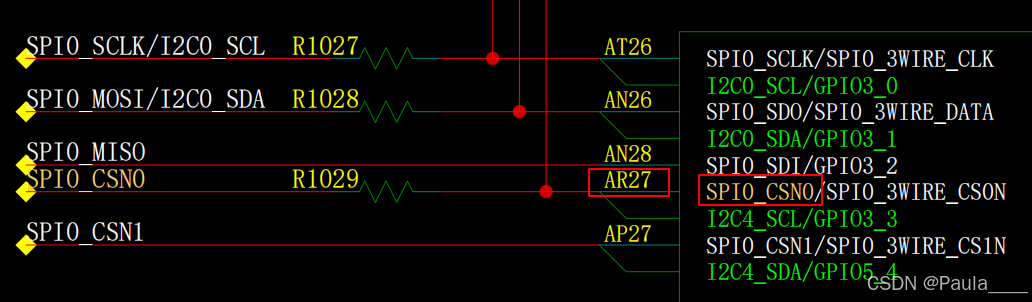
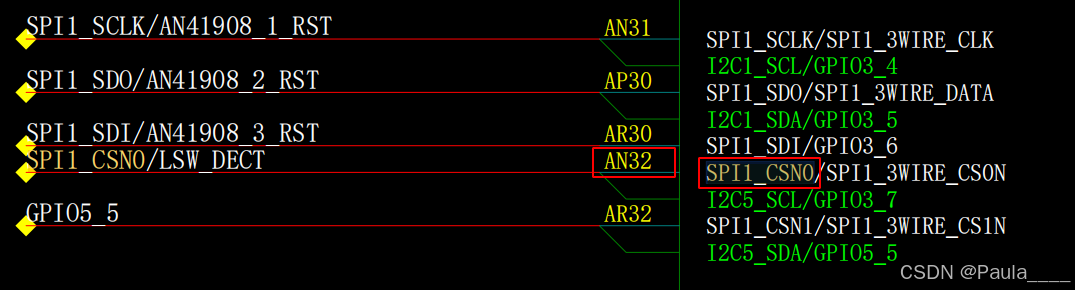
转接板上的PWDN_Camera在引脚7对应到核心板是SPI0_CSN0_SEN、SPI1_CSN0_SEN。
SENSOR_RSTN0-->GPIO5_0 = GPIO40
SENSOR_RSTN1-->GPIO5_1 = GPIO41,着重看这个
SENSOR_RSTN2-->GPIO5_2 = GPIO42
SENSOR_RSTN3-->GPIO5_3 = GPIO43
PWDN_Camera0-->GPIO3_3 = GPIO27
PWDN_Camera1-->GPIO3_7 = GPIO31,着重看这个
核心板引脚对应关系如下:
开发板怎么发送i2c_write和i2c_read
i2c_read 0 0x6c 0x3016 0x3016 2 1 1
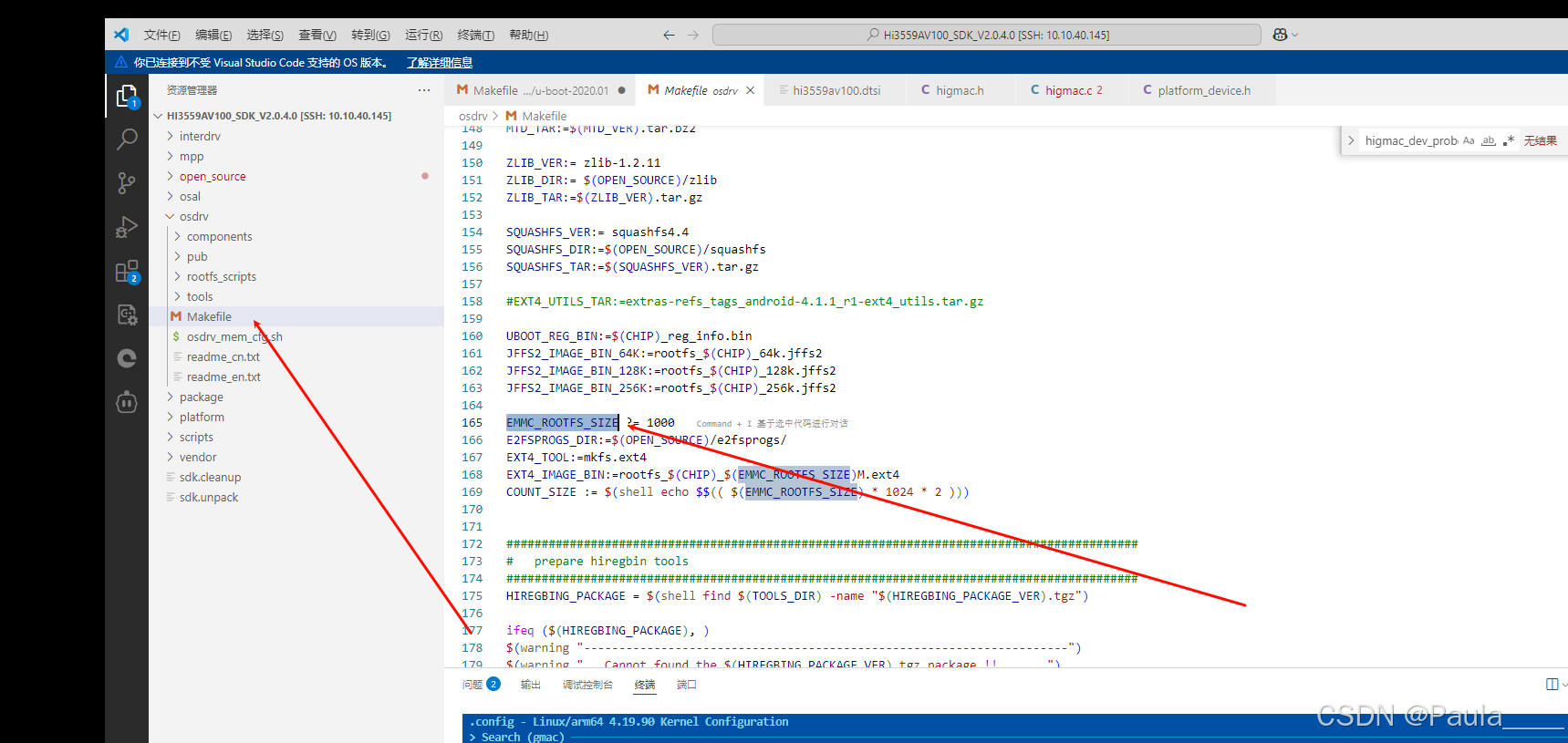
2.0.4.0版的SDK文件系统内容怎么修改
Hi3559AV100_SDK_V2.0.4.0版本代码说明
cd osdrv/
找到Makefile文件 ,将此句注释
# pushd $(E2FSPROGS_DIR)/out/pc/contrib; ./populate-extfs.sh $(OSDRV_DIR)/pub/$(PUB_ROOTFS) $(OSDRV_DIR)/pub/$(PUB_IMAGE)/$(EXT4_IMAGE_BIN);popd
正常编译文件:make BOOT_MEDIA=emmc AMP_TYPE=linux all
cd ..
mkdir tmp_rootfs
sudo mount osdrv/pub/hi3559av100_emmc_image_glibc_multi-core_arm64/rootfs_hi3559av100_96M.ext4 tmp_rootfs/
sudo cp -ar osdrv/pub/rootfs_glibc_multi-core_arm64/* tmp_rootfs/
sudo umount tmp_rootfs
运行完毕后此时候的rootfs_hi3559av100_96M.ext4文件,就可以最终运行
海思sdk怎么把文件系统空间调大
git克隆到虚拟机目录下
Git引入了安全限制,防止用户操作不属于自己的仓库,以避免潜在的漏洞。遇到的这个问题可能是因为我正在访问的网络路径或共享目录的权限问题,导致Git认为该目录不安全。
解决方案是进入cmd:
发送:
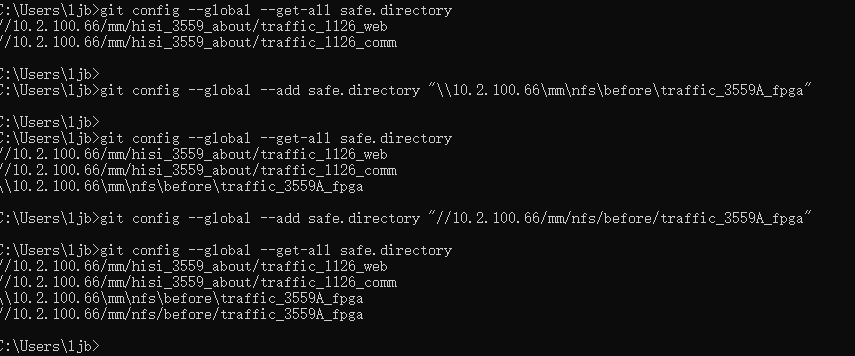
git config --global --add safe.directory "//10.2.100.66/mm/hisi_3559_about/traffic_1126_web"
查看配置是否生效
git config --global --get-all safe.directory

















 1724
1724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









