







 本文介绍了Shell脚本中的for循环和while循环的使用方法,并通过示例展示了如何利用这些循环进行数值求和。此外,还解释了重定向的概念及其实现方式,以及如何在Shell中定义和使用数组。
本文介绍了Shell脚本中的for循环和while循环的使用方法,并通过示例展示了如何利用这些循环进行数值求和。此外,还解释了重定向的概念及其实现方式,以及如何在Shell中定义和使用数组。
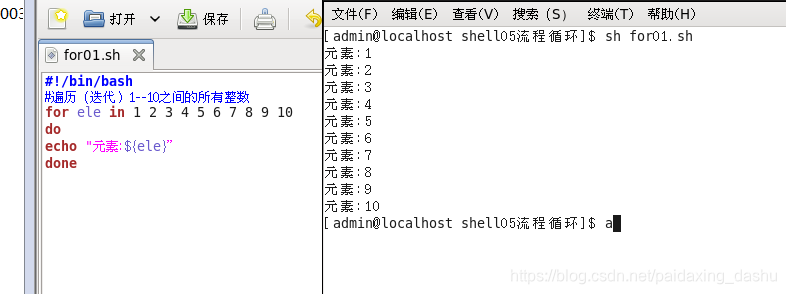
一,for循环
for循环(元素遍历 | 迭代)
格式1:
for 变量名 in 列表 (v1 v2 v3 v4......)
do
code.....#循环体
done
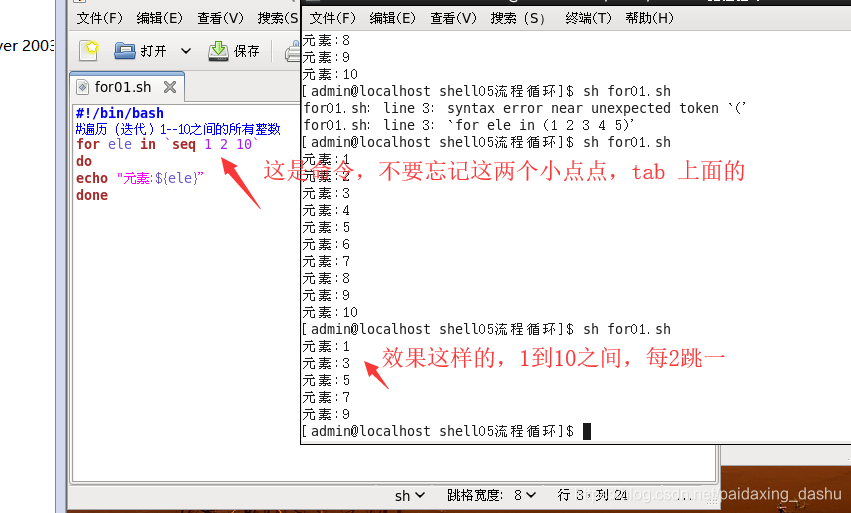
格式2:
for 变量名 in `seq N`
do
code.....#循环体
done
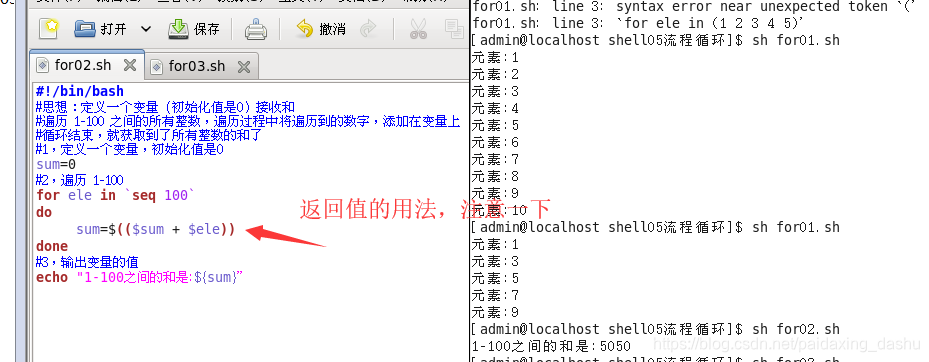
eg:求1–100的和
while 循环和for就是格式不大一样,作用差不多
格式:
遍历1--10 和python一样的用法
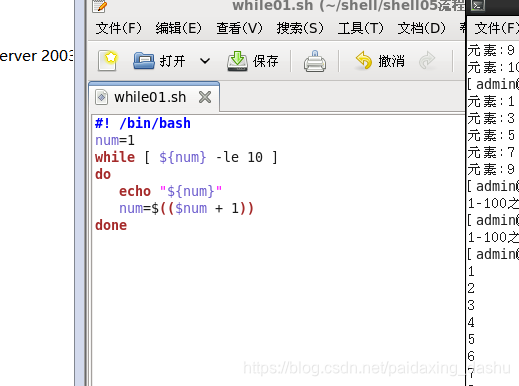
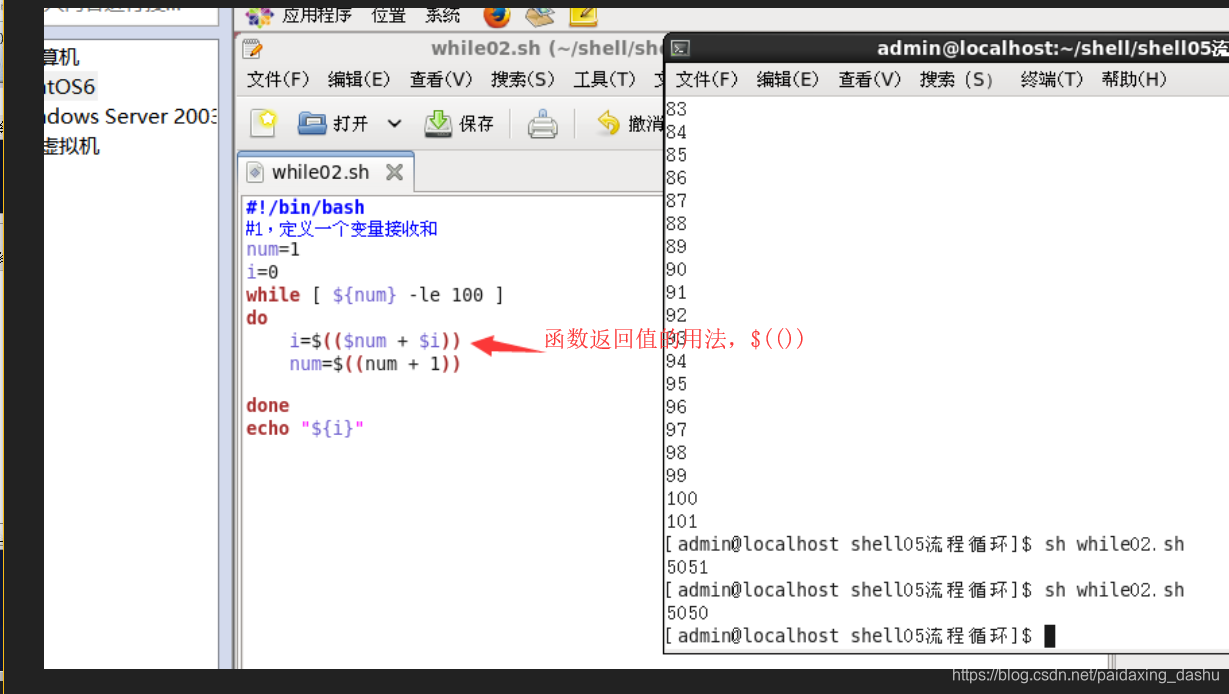
eg:用while循环求1–100之间的整数和
二,重定向
是什么?
可用将命令产生的数据保存到磁盘文件
为什么?
一种
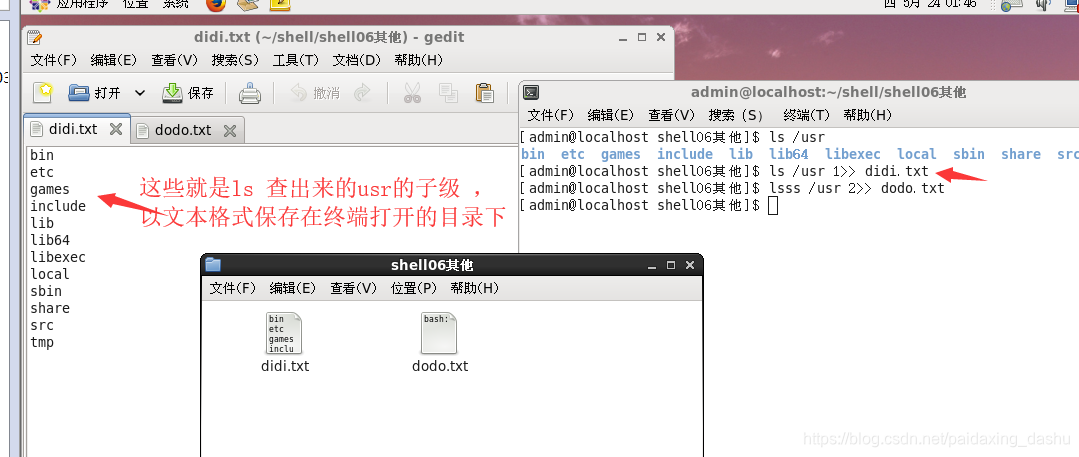
格式1:命令 1>> 磁盘文件(将正确结果输出到文件)
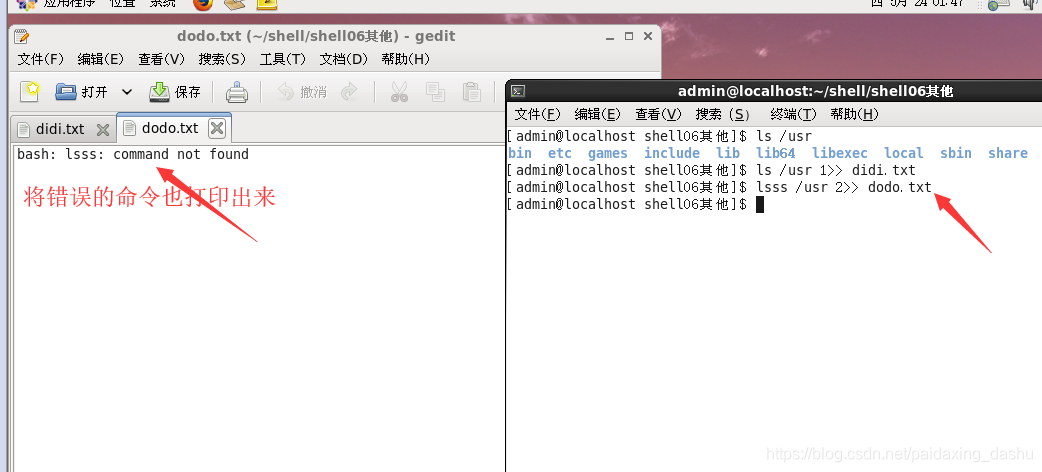
格式2:命令 2>> 磁盘文件(将错误结果输出到磁盘文件)
三,数组
是什么?
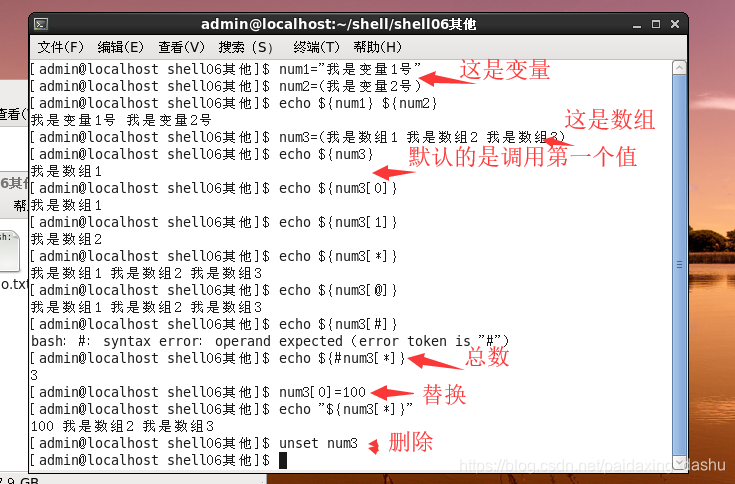
数组也是变量,但是是特殊的变量,可以存储好多个值

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









