




小华HC32L136K8TA 单片机PRINTF
一、将前面建立好的工程文件LED_TEST文件夹复制一份,命名为PRINTF. 将LED_TEST\MDK\LED_TEST.uvprojx,改为PRINTF.uvprojx.双击这个文件打开工程。
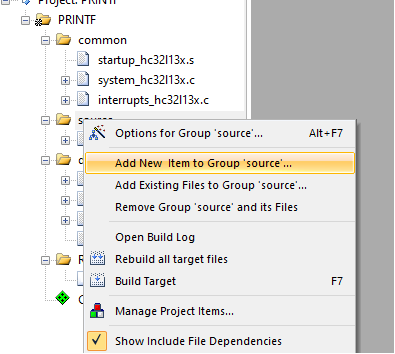
二、修改工程配置
1.组driver下面添加uart.c
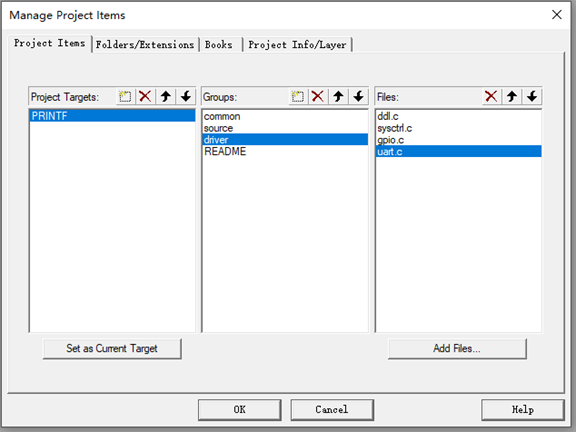
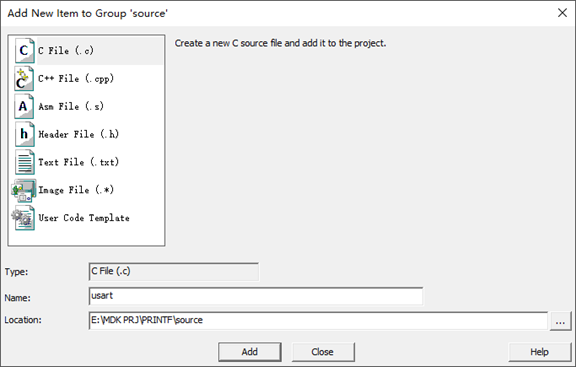
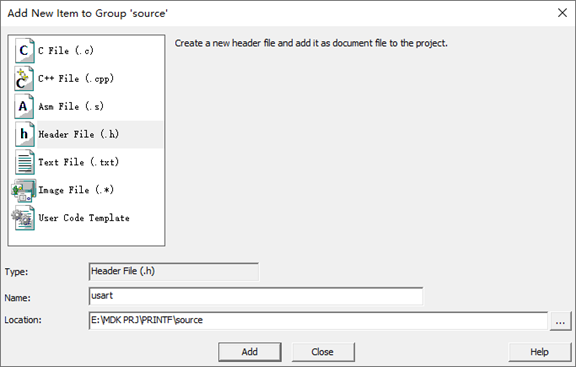
2.source下面添加usart.c,usart.h
usart.c的文件内容如下
#include "usart.h"
#include "gpio.h"
#include "uart.h"
//串口引脚配置
void UART0_PortInit(void)
{
stc_gpio_cfg_t stcGpioCfg;
DDL_ZERO_STRUCT(stcGpioCfg);
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio,TRUE); //使能GPIO模块时钟
///<TX
stcGpioCfg.enDir = GpioDirOut;
#if defined(DEBUG_UART0_B6B7)
Gpio_Init(GpioPortB, GpioPin6, &stcGpioCfg);
Gpio_SetAfMode(GpioPortB, GpioPin6, GpioAf2); //配置Pb6 端口为 010 ---- UART0_TXD UART0模块TXD信号
#elif defined(DEBUG_UART0_B8B9)
Gpio_Init(GpioPortB, GpioPin8, &stcGpioCfg);
Gpio_SetAfMode(GpioPortB, GpioPin8, GpioAf7); //配置Pb8 端口为 ---- UART0_TXD UART0模块TXD信号
#elif defined(DEBUG_UART0_A9A10)
Gpio_Init(GpioPortA, GpioPin9, &stcGpioCfg);
Gpio_SetAfMode(GpioPortA, GpioPin9, GpioAf1);
#endif
///<RX
stcGpioCfg.enDir = GpioDirIn;
#if defined(DEBUG_UART0_B6B7)
Gpio_Init(GpioPortB, GpioPin7, &stcGpioCfg);
Gpio_SetAfMode(GpioPortB, GpioPin7, GpioAf2); //配置Pb7 端口010 ---- UART0_RXD UART0模块RXD信号
#elif defined(DEBUG_UART0_B8B9)
Gpio_Init(GpioPortB, GpioPin9, &stcGpioCfg);
Gpio_SetAfMode(GpioPortB, GpioPin9, GpioAf7); //配置Pb9 端口 ---- UART0_RXD UART0模块RXD信号
#elif defined(DEBUG_UART0_A9A10)
Gpio_Init(GpioPortA, GpioPin10, &stcGpioCfg);
Gpio_SetAfMode(GpioPortA, GpioPin10, GpioAf1);
#endif
}
//串口配置
void Uart0Cfg(uint32_t baud)
{
stc_uart_cfg_t stcCfg;
DDL_ZERO_STRUCT(stcCfg);
///< 开启外设时钟
Sysctrl_SetPeripheralGate(SysctrlPeripheralUart0,TRUE);///<使能uart0模块时钟
///<UART Init
stcCfg.enRunMode = UartMskMode1; ///<模式1
stcCfg.enStopBit = UartMsk1bit; ///<1bit停止位
//stcCfg.enMmdorCk = UartMskEven; ///<偶检验
stcCfg.enMmdorCk = UartMskDataOrAddr;//
stcCfg.stcBaud.u32Baud = baud; ///<波特率
stcCfg.stcBaud.enClkDiv = UartMsk8Or16Div; ///<通道采样分频配置 模式1/3 8分频
stcCfg.stcBaud.u32Pclk = Sysctrl_GetPClkFreq(); ///<获得外设时钟(PCLK)频率值
Uart_Init(M0P_UART0, &stcCfg); ///<串口初始化
///<UART中断使能
Uart_ClrStatus(M0P_UART0,UartRC); ///<清接收请求
Uart_ClrStatus(M0P_UART0,UartTC); ///<清接收请求
Uart_EnableIrq(M0P_UART0,UartRxIrq); ///<使能串口接收中断
//Uart_EnableIrq(M0P_UART0,UartTxIrq); ///<使能串口发送中断
Uart_DisableIrq(M0P_UART0,UartTxIrq); //禁止发送中断
EnableNvic(UART0_IRQn, IrqLevel3, TRUE); ///<系统中断使能
}
Uart.h
//UART1中断
void Uart0_IRQHandler(void)
{
uint8_t revdata;
if(Uart_GetStatus(M0P_UART0, UartRC))
{
Uart_ClrStatus(M0P_UART0, UartRC); //清除中断状态位
revdata=Uart_ReceiveData(M0P_UART0); //接收到数据
Uart_SendDataPoll(M0P_UART0,revdata);
//Uart_DisableIrq(M0P_UART1,UartRxIrq); //禁止接收中断
}
if(Uart_GetStatus(M0P_UART0, UartTC))
{
Uart_ClrStatus(M0P_UART0, UartTC); //清除中断状态位
//Uart_SendDataIt(M0P_UART0, 0x55); //发送数据
//Uart_DisableIrq(M0P_UART1,UartTxIrq); //禁止发送中断
//Uart_EnableIrq(M0P_UART1,UartRxIrq); //使能接收中断
}
}
usart.h
#ifndef __USART_H
#define __USART_H
#include "ddl.h"
//#define DEBUG_UART0_B6B7 //测试成功
#define DEBUG_UART0_B8B9 //测试成功
//#define DEBUG_UART0_A9A10 //测试成功
void UART0_PortInit(void);
void Uart0Cfg(uint32_t baud);
#endif
Main.c
#include "gpio.h"
#include "usart.h"
static void App_LedInit(void);
int32_t main(void)
{
UART0_PortInit();
Uart0Cfg(57600);
printf("hello world \r\n");
while(1)
{
printf("HC32L136K8TA-MINI......\r\n");
delay1ms(1000);
}
}
Ddl.c修改
int fputc(int ch, FILE *f)
{
Uart_SendDataPoll(M0P_UART0,ch);
return ch;
}
编译下载,烧录后的打印效果


















 5827
5827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











