




 本文介绍了深度学习研究中获取三维点云数据的四种方式:激光扫描仪、深度相机、双目相机和运动恢复结构。重点讲解了每种方法的工作原理和优缺点,强调了激光扫描仪获取的点云更真实,相机方法适用于低成本但计算量大的场景。
本文介绍了深度学习研究中获取三维点云数据的四种方式:激光扫描仪、深度相机、双目相机和运动恢复结构。重点讲解了每种方法的工作原理和优缺点,强调了激光扫描仪获取的点云更真实,相机方法适用于低成本但计算量大的场景。
【深度学习初探】Day31 - 三维点云数据的获取
文章目录
在进行三维点云图像研究时,我们首先要获得三维点云的数据集,而如何获取成了一个难题。点云数据是一团“点”组成的数据集,这些“点”包含了丰富的信息,包括三维坐标(在当前坐标系下的)X,Y,Z,颜色、分类值、强度值、时间等等。那么如何准确获得这些点的信息,经过多年的研究,我们总结出了如下几种方案。
一、激光扫描仪(LiDAR)
激光三维扫描仪利用激光测距的原理,通过记录被测物体表面大量的密集的点在三维坐标、反射率和纹理等信息,能快速复建出被测目标的三维模型及线、面、体等各种图件数据。原理图:
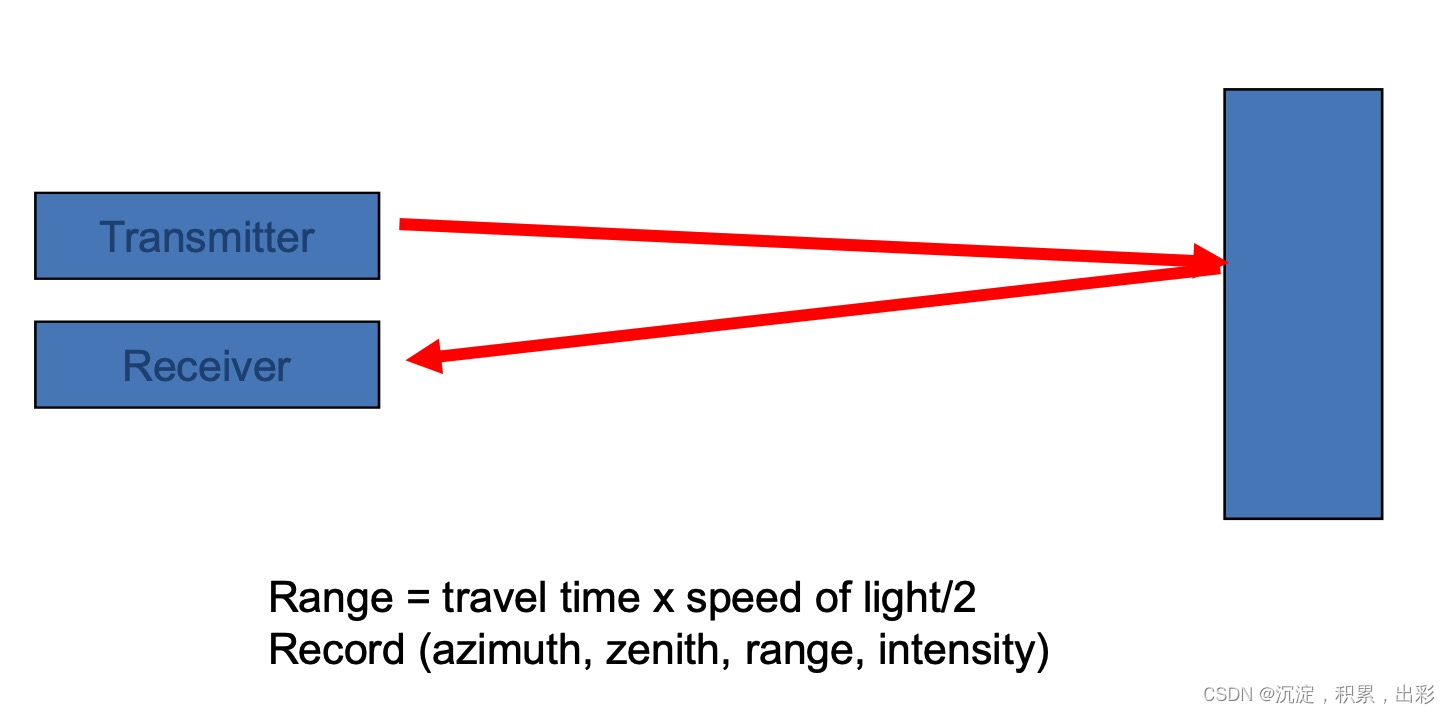
一般利用激光扫描的方式主要用于逆向工程,负责曲面抄数,工件三维测量等,针对没有技术文档的三维实物、样品或模型,快速测出物体的轮廓集合数据,加以构建,生成通用输出格式的曲面数字化模型。
它的特点是成本相对较高,但是生成的点云质量高。
二、深度相机(Depth Camra)
通过红外激光器把具有结构特征的光线投影到物体上,通过红外摄像头采集得到深度信息,如微软的Kinect,Kinect 2。
传统的RGB彩色普通相机称为2D相机,只能拍摄视角内的物体而没有物体到相机的距离信息。但
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









