






 本文介绍了如何在 ARM64 架构上编译并运行 Android L 预览版。通过使用 Linaro 团队提供的内核版本和 QEMU 模型,作者成功地在模拟器上启动了 Android L 预览版,并分享了详细的步骤。
本文介绍了如何在 ARM64 架构上编译并运行 Android L 预览版。通过使用 Linaro 团队提供的内核版本和 QEMU 模型,作者成功地在模拟器上启动了 Android L 预览版,并分享了详细的步骤。
http://www.cnx-software.com/2014/08/23/how-to-build-and-run-android-l-64-bit-arm-in-qemu/
The Linaro team put together ahead of time, around may 2014, a version of the Kernel for aarch64 called ranchu (forked from 3.10) and patched/worked together with the qemu team to create a machine model ranchu capable of emulating aarch64. Everything is well explained in the article above.
However, by compiling the latest Android L preview 2 AOSP, I ended up with serious issues during the zygote startup. It looks there is something seriously different in how boot.art is made, thus passing it to patchoat (at first time boot) something goes very wrong. Not going into details of the hell issue.
Sometimes, when things goes wrong, better to restart from scratch. It's the old rule learned since the old Windows 95 time, hit ctrl-alt-delete.
While compiling the AOSP, I noticed that into the prebuilt folder you have something called emultator64-arm64 which sounds pretty much what I wanted; who said that Google is not providing amr64 emulation yet? :) Yes, it's not official, emulator images are not provided with the latest SDKv19 but I happily found another piece of gold. In the folder qemu-kernel/arm64/kernel-qemu this file sounds very much like the kernel prebuilt for the arm64 emulator. Why not trying compiling AOSP for generic arm64 support? in the end the device reference is there in the AOSP without any patching... and voila...
Here are the steps to follow:
1) get Android L developer preview AOSP
cd /data/src
mkdir AOSP
repo init -u https://android.googlesource.com/platform/manifest -b android-l-preview_r2
repo sync
wait a considerable amount of time to sync, almost 2 hours, prepare almost 100GB on your drive
note: you need repo command from google configured on your system.
2) have fun and compile (takes almost 1h on a decent machine)
source build/ envsetup.sh
lunch aosp_arm64-eng
m -j8
here is the lunch output
============================================
PLATFORM_VERSION_CODENAME=AOSP
PLATFORM_VERSION=4.4.3.43.43.43
TARGET_PRODUCT=aosp_arm64
TARGET_BUILD_VARIANT=eng
TARGET_BUILD_TYPE=release
TARGET_BUILD_APPS=
TARGET_ARCH=arm64
TARGET_ARCH_VARIANT=armv8-a
TARGET_CPU_VARIANT=generic
TARGET_2ND_ARCH=arm
TARGET_2ND_ARCH_VARIANT=armv7-a-neon
TARGET_2ND_CPU_VARIANT=cortex-a15
HOST_ARCH=x86_64
HOST_OS=linux
HOST_OS_EXTRA=Linux-3.13.0-37-generic-x86_64-with-Ubuntu-14.04-trusty
HOST_BUILD_TYPE=release
BUILD_ID=AOSP
OUT_DIR=out
============================================
3) move to the prebuilt emulator folder, in my case I am under linux-x64, chose your arch
cd /data/src/AOSP/prebuilts/android-emulator/linux-x86_64
4) to run the emulator you need anyhow an AVD configuration or start it manually from the qemu binary without using the google emulator wrapper. I prefer to use the wrapper here as the command is cleaner.
create an AVD using your ANDROID SDK, launch
./android avd
(from platform tools, you can create one via command line ./android create)
or if you have already defined AVDs, just use one of them, settings will be overwritten by the command, so whatever you have in your AVD you are just using the config.ini file (stored in the .android folder). Preferably, set your AVD with more then 1024 MB ram.
5) now you are ready to launch the emulator, here is the command (all one line).
testL is the name of the AVD prepared. Wait, wait wait for android to finish booting, remember you are on a slow emulation, it takes time. If you are curios to see what's going on, just run "logcat" at the prompt to see all the mess in real time.
./emulator64-arm64 -kernel ../../qemu-kernel/arm64/kernel-qemu -data /data/src/AOSP/out/target/product/generic_arm64/system.img -system /data/src/AOSP/out/target/product/generic_arm64/system.img -cache /data/src/AOSP/out/target/product/generic_arm64/cache.img -ramdisk /data/src/AOSP/out/target/product/generic_arm64/ramdisk.img -avd testL
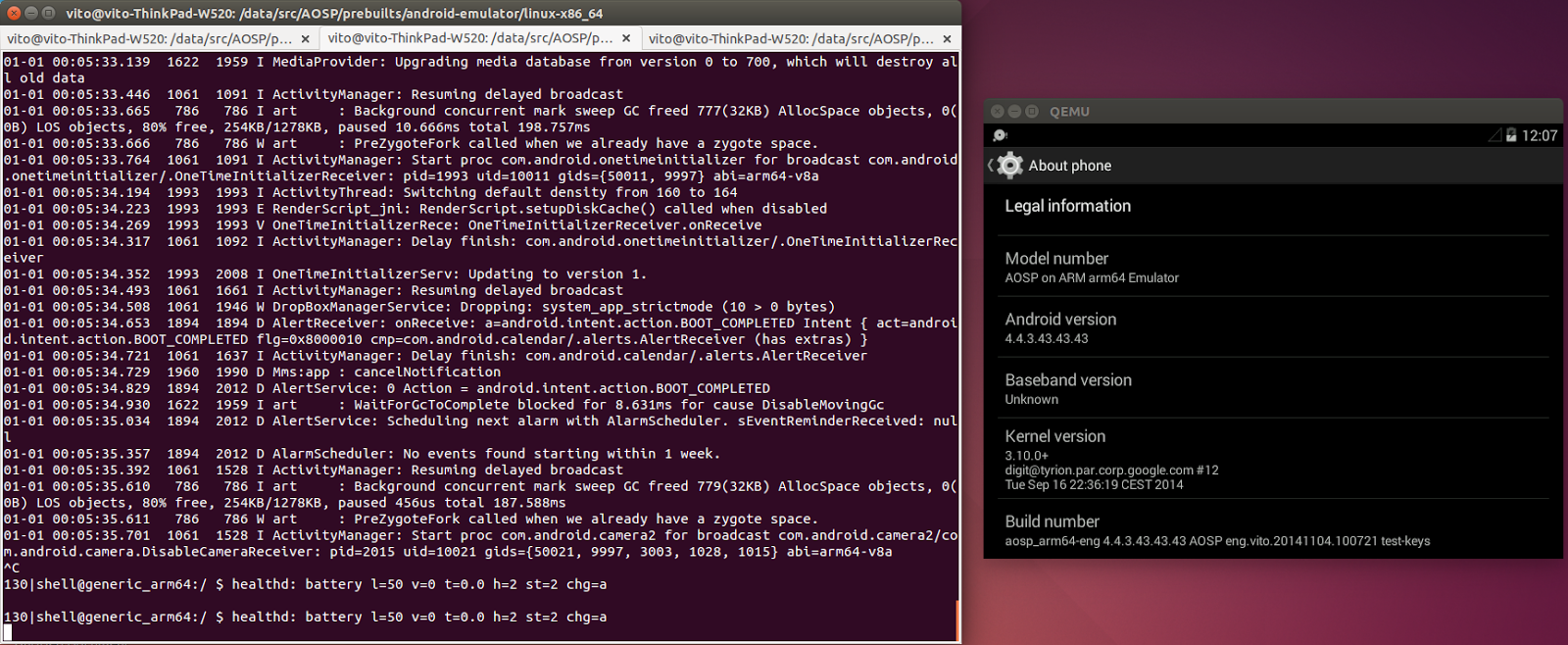
Output, kernel boot and android prompt:
console on port 5554, ADB on port 5555 Initializing cgroup subsys cpu Linux version 3.10.0+ (digit@tyrion.par.corp.google.com) (gcc version 4.8 (GCC) ) #12 SMP Tue Sep 16 22:36:19 CEST 2014 CPU: AArch64 Processor [411fd070] revision 0 Machine: ranchu debug: skip boot console de-registration. Unknown earlyprintk arguments: ttyAMA0 PERCPU: Embedded 10 pages/cpu @ffffffc07ffdf000 s11456 r8192 d21312 u40960 Built 1 zonelists in Zone order, mobility grouping on. Total pages: 517120 Kernel command line: console=ttyAMA0,38400 keep_bootcon earlyprintk=ttyAMA0 PID hash table entries: 4096 (order: 3, 32768 bytes) Dentry cache hash table entries: 262144 (order: 9, 2097152 bytes) Inode-cache hash table entries: 131072 (order: 8, 1048576 bytes) Memory: 2048MB = 2048MB total Memory: 2058560k/2058560k available, 38592k reserved Virtual kernel memory layout: vmalloc : 0xffffff8000000000 - 0xffffffbbffff0000 (245759 MB) vmemmap : 0xffffffbc00e00000 - 0xffffffbc02a00000 ( 28 MB) modules : 0xffffffbffc000000 - 0xffffffc000000000 ( 64 MB) memory : 0xffffffc000000000 - 0xffffffc080000000 ( 2048 MB) .init : 0xffffffc00057a000 - 0xffffffc0005a8cc0 ( 188 kB) .text : 0xffffffc000080000 - 0xffffffc000579364 ( 5093 kB) .data : 0xffffffc0005a9000 - 0xffffffc0005e7200 ( 249 kB) SLUB: HWalign=64, Order=0-3, MinObjects=0, CPUs=1, Nodes=1 Hierarchical RCU implementation. RCU restricting CPUs from NR_CPUS=4 to nr_cpu_ids=1. NR_IRQS:64 nr_irqs:64 0 GIC CPU mask not found - kernel will fail to boot. GIC CPU mask not found - kernel will fail to boot. Architected local timer running at 62.50MHz (virt). Console: colour dummy device 80x25 Calibrating delay loop (skipped), value calculated using timer frequency.. 125.00 BogoMIPS (lpj=625000) pid_max: default: 32768 minimum: 301 Mount-cache hash table entries: 256 /cpus/cpu@0: Unknown CPU type hw perfevents: no hardware support available Brought up 1 CPUs SMP: Total of 1 processors activated (125.00 BogoMIPS). atomic64 test passed NET: Registered protocol family 16 vdso: 2 pages (1 code, 1 data) at base ffffffc0005b1000 hw-breakpoint: found 6 breakpoint and 4 watchpoint registers. software IO TLB [mem 0xbd400000-0xbd800000] (4MB) mapped at [ffffffc07d400000-ffffffc07d7fffff] Serial: AMBA PL011 UART driver 9000000.pl011: ttyAMA0 at MMIO 0x9000000 (irq = 33) is a PL011 rev1 console [ttyAMA0] enabled bio: create slab at 0 SCSI subsystem initialized Switching to clocksource arch_sys_counter NET: Registered protocol family 2 TCP established hash table entries: 16384 (order: 6, 262144 bytes) TCP bind hash table entries: 16384 (order: 6, 262144 bytes) TCP: Hash tables configured (established 16384 bind 16384) TCP: reno registered UDP hash table entries: 1024 (order: 3, 32768 bytes) UDP-Lite hash table entries: 1024 (order: 3, 32768 bytes) NET: Registered protocol family 1 RPC: Registered named UNIX socket transport module. RPC: Registered udp transport module. RPC: Registered tcp transport module. RPC: Registered tcp NFSv4.1 backchannel transport module. Unpacking initramfs... Freeing initrd memory: 816K (ffffffc008000000 - ffffffc0080cc000) fuse init (API version 7.22) msgmni has been set to 4022 io scheduler noop registered io scheduler cfq registered (default) loop: module loaded vda: unknown partition table vdb: unknown partition table vdc: unknown partition table tun: Universal TUN/TAP device driver, 1.6 tun: (C) 1999-2004 Max Krasnyansky mousedev: PS/2 mouse device common for all mice input: qwerty2 as /devices/9040000.goldfish-events/input/input0 ashmem: initialized logger: created 256K log 'log_main' logger: created 256K log 'log_events' logger: created 256K log 'log_radio' logger: created 256K log 'log_system' ip_tables: (C) 2000-2006 Netfilter Core Team arp_tables: (C) 2002 David S. Miller TCP: cubic registered NET: Registered protocol family 10 ip6_tables: (C) 2000-2006 Netfilter Core Team sit: IPv6 over IPv4 tunneling driver NET: Registered protocol family 17 Bridge firewalling registered Registering SWP/SWPB emulation handler drivers/rtc/hctosys.c: unable to open rtc device (rtc0) Freeing unused kernel memory: 184K (ffffffc00057a000 - ffffffc0005a8000) init (1): /proc/1/oom_adj is deprecated, please use /proc/1/oom_score_adj instead. init: /dev/hw_random not found init: /dev/hw_random not found EXT4-fs (vda): mounted filesystem with ordered data mode. Opts: (null) EXT4-fs (vdb): Ignoring removed nomblk_io_submit option EXT4-fs (vdb): mounted filesystem with ordered data mode. Opts: nomblk_io_submit,errors=panic EXT4-fs (vdc): Ignoring removed nomblk_io_submit option EXT4-fs (vdc): mounted filesystem with ordered data mode. Opts: nomblk_io_submit,errors=panic init: cannot find '/system/etc/install-recovery.sh', disabling 'flash_recovery' healthd: BatteryVoltagePath not found healthd: BatteryTemperaturePath not found binder: 774:774 transaction failed 29189, size 0-0 logd.auditd: start shell@generic_arm64:/ $

















 427
427

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









