




 本文围绕图卷积神经网络(GCN)展开,介绍了学习该论文所需的前期知识,包括概率论、图算法等。阐述了论文结构、研究背景及意义。泛读部分分析了摘要和标题,精读则聚焦模型总览、R - GCN模型结构、拉普拉斯矩阵及图的频域变换等内容,深入讲解了GCN的原理和计算方法。
本文围绕图卷积神经网络(GCN)展开,介绍了学习该论文所需的前期知识,包括概率论、图算法等。阐述了论文结构、研究背景及意义。泛读部分分析了摘要和标题,精读则聚焦模型总览、R - GCN模型结构、拉普拉斯矩阵及图的频域变换等内容,深入讲解了GCN的原理和计算方法。
文章目录
前言
本课程来自深度之眼,部分截图来自课程视频。
文章标题:Semi-Supervised Classification with Graph Convolutional Networks
图卷积神经网络的半监督分类(GCN)
作者:Thomas N.Kipf,Max Welling
单位:University of Amsterdam
发表会议及时间:ICLR 2017
公式输入请参考:在线Latex公式
前期知识基础要求
概率论:了解基本的概率论知识,掌握条件概率的概念
图算法:图的基本算法,算法时间复杂度分析
(重点)图频域分析:图的拉普拉斯矩阵、傅里叶变换、图的频域变换、卷积、切比雪夫近似
深度学习:了解SGD等基本原理
论文结构
- Abstract:提出本文将卷积操作应用到图上,通过图频域的近似分析来建模,学习图的局部结构和节点特征。
- Introduction:介绍图上节点分类的半监督问题,通过神经网络学习节点的表达,定义了半监督loss function。提出了图上的神经网络信息前向传播规则,并将其与图频域分析联合起来。
- Fast Approximate Convolutions On Graphs:图的神经网络信息前向传播规则,图频域分析(重点)。
- Semi-Supervised Node Classification:提出一个两层的GCN模型,并设计了一个半监督的loss function。
- Related Work:总结了DeepWalk、Node2vec、LINE等算法,GGNN等应用RNN、卷积在图上的算法。
- Experiments:实验探究模型有效性:节点分类、信息传播、训练时间。(Cora数据集)
- Discussion:讨论GCN相比其他baselines模型的优势,讨论未来发展方向。
- Conclusion:总结提出的GCN模型,基于图频域分析的一阶近似,使用图的结构以及节点特征通过半监督学习,实验证明了模型的有效性。
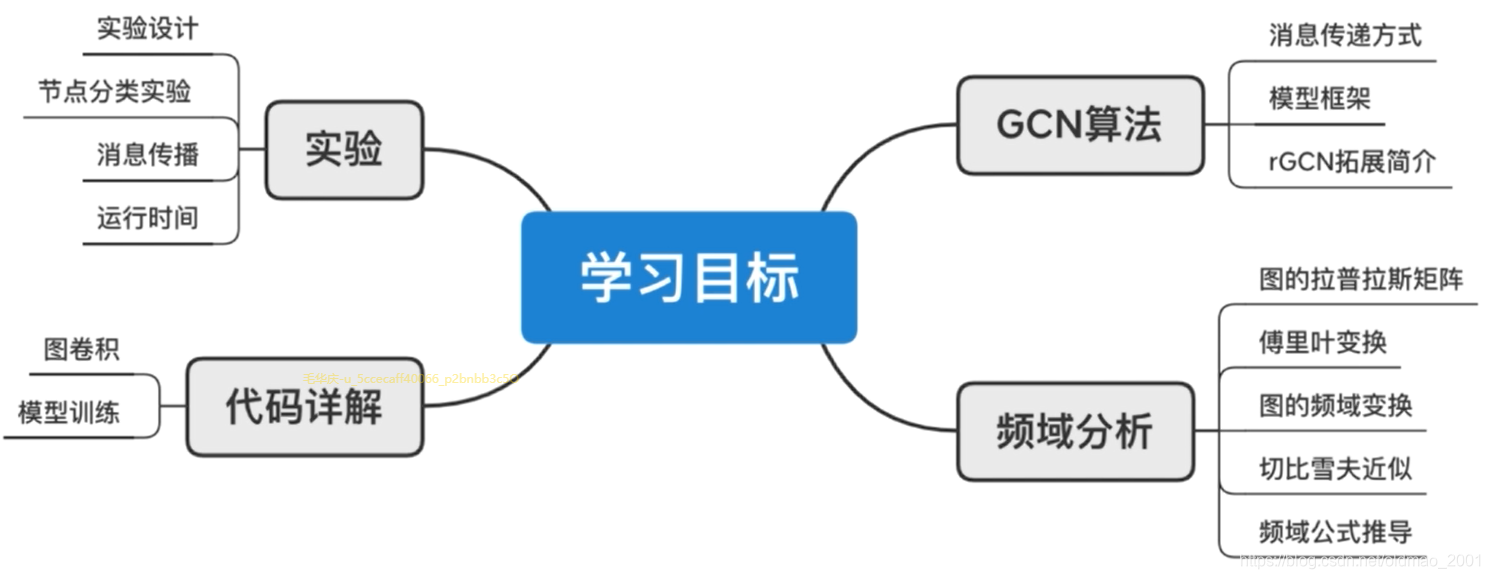
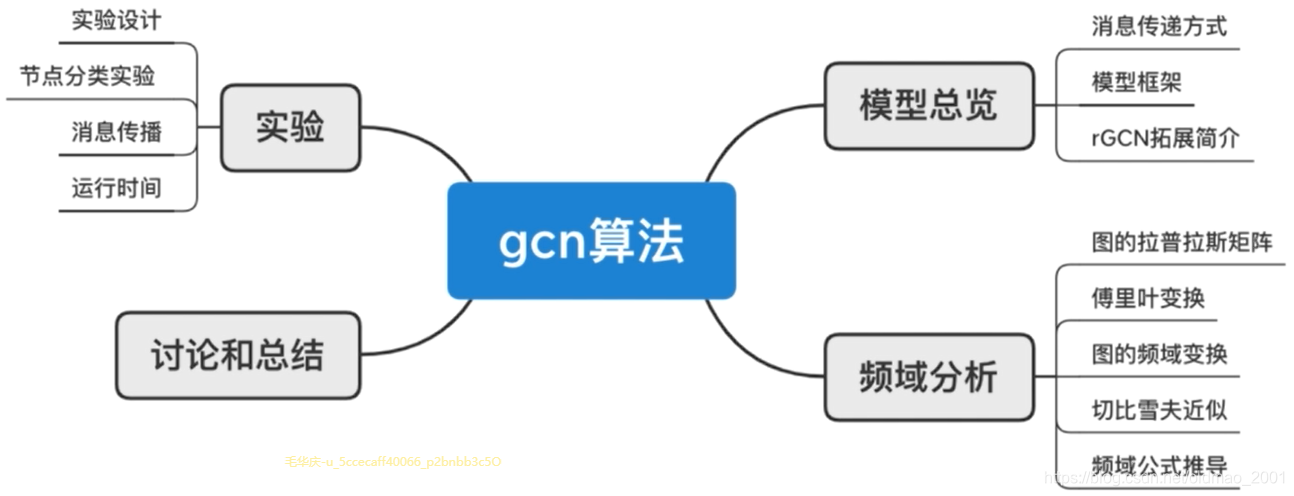
学习目标
研究背景
直接上图,具体讲解可以参考上一篇笔记

消息传递机制(略,详见上一篇笔记)
前面几篇基于随机游走的论文在获取节点的embedding过程中只考虑了图结构的信息,而节点的特征是在后期加入的,特征并没有经过模型进行抽取或变化;关于6.7.8篇论文除了考虑图本身结构的信息之外,还加入了节点的特征进行计算,因此可以直接完成端到端的任务。
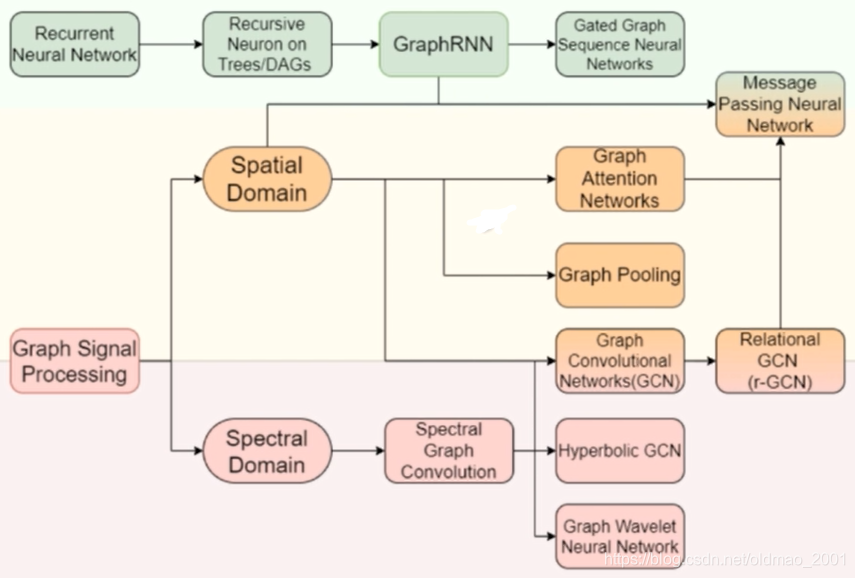
这里面Graph Pooling就相当于GraphSAGE,然后r-GCN是GCN在知识图谱的结合。
研究意义
·图卷积神经网络最常用的几个模型之一(GCN,GAT,GraphSAGE)
·将卷积算法直接用于处理图结构数据,频域分析与消息传播公式
·图频域卷积的局部一阶近似,单层的GCN处理图中一阶邻居的信息,K层GCN处理K阶邻居
·卷积的参数共享,对于每个节点参数是共享的
·图神经网络的最重要模型之一
泛读
摘要
1.本文提出了一种基于图的结构数据的半监督学习框架,该方法可直接在图上进行卷积操作。
2.卷积核的设计是通过图频域分析的局部一阶逼近的计算。
3.本文的模型运行效率高,通过图的局部结构和节点特征来获得节点的向量化表示。
4.大量实验证明了本文方法的有效性。
论文标题
- Introduction
- Fast Approximate Convolutions On Graphs
2.1 Spectral graph convolutions
2.2 Layer-wise Linear Model - Semi-Supervised Node Classification
3.1 Example
3.2 Implementation - Related Work
4.1 Graph-based Semi-supervised Learning
4.2 Neural Networks On Graphs - Experiments
5.1 Datasets
5.2 Experimental Set-up
5.3 Baselines - Results
6.1 Semi-supervised Node Classification
6.2 Evaluation Of Propagation Model
6.3 Training Time Per Epoch - Discussion
7.1 Semi-supervised Model
7.2 Limitations And Future Work - Conclusion
精读
模型总览
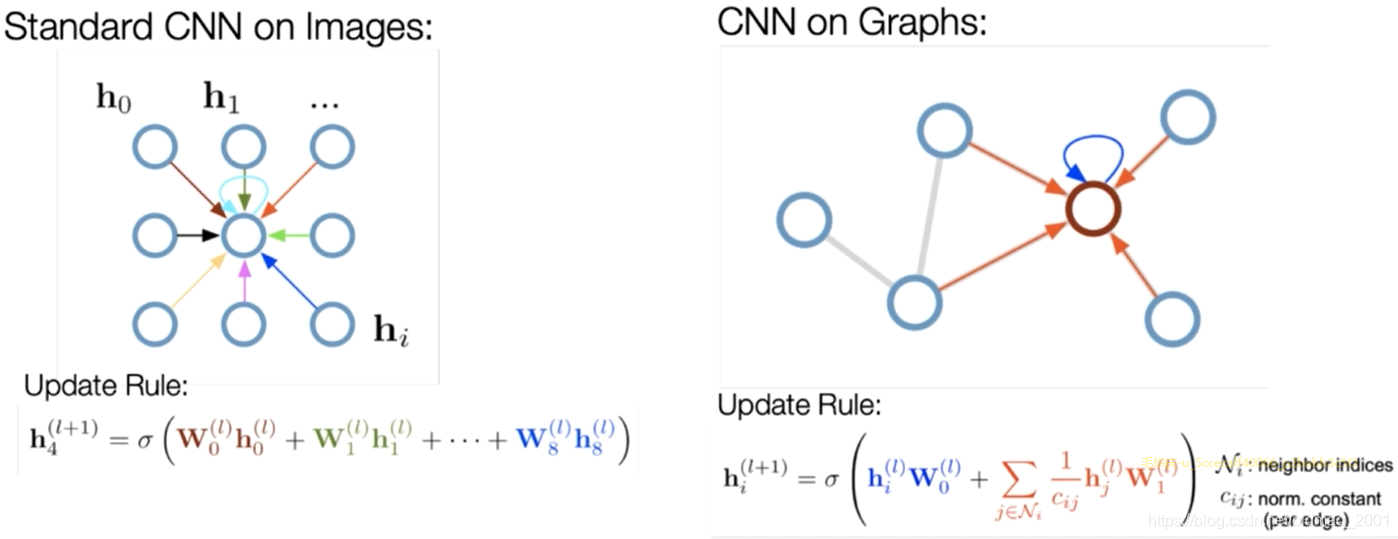
Main idea:pass messages between pairs of nodes & agglomerate. 具体公式为:
H
l
+
1
=
σ
(
D
~
−
1
2
A
~
D
~
−
1
2
H
l
Θ
l
)
(1)
\text{H}^{l+1}=\sigma\left ( \tilde D^{-\frac{1}{2}}\tilde A\tilde D^{-\frac{1}{2}}H^l\Theta ^l\right )\tag1
Hl+1=σ(D~−21A~D~−21HlΘl)(1)
这里的两个
D
~
−
1
2
\tilde D^{-\frac{1}{2}}
D~−21实际上相当于
D
~
−
1
\tilde D^{-1}
D~−1(因为D是对角矩阵),
A
~
\tilde A
A~相当于A+I,也就是邻居加上自己本身的信息(I就是对角线都为1的单位阵),
H
l
H^l
Hl实际上就是节点的特征矩阵,如果有N个节点,每个节点特征是d维,这个矩阵大小就是N×d,AH如果拿出来看,H的第一列就是特征的第一个维度,上面不为0的项就所有当前节点的邻居节点的特征,AH就得到邻居特征的汇聚效果(由于加了I,这里当然有自己本身的信息)。最后的
Θ
\Theta
Θ是我们模型要训练的参数。以上是从空域spatial的角度来理解GCN的,其实前面都有学过,以上讲的一层GCN的操作,如果有多层:
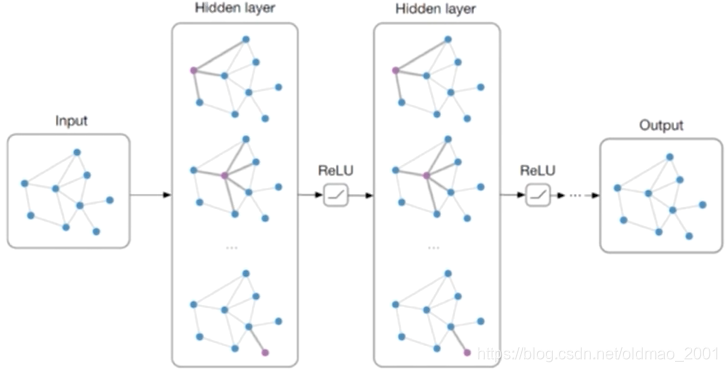
Stacking multiple layers like standard CNNs:
这里的输入是邻接矩阵和特征矩阵X,最后得到的结果要和label进行交叉熵。
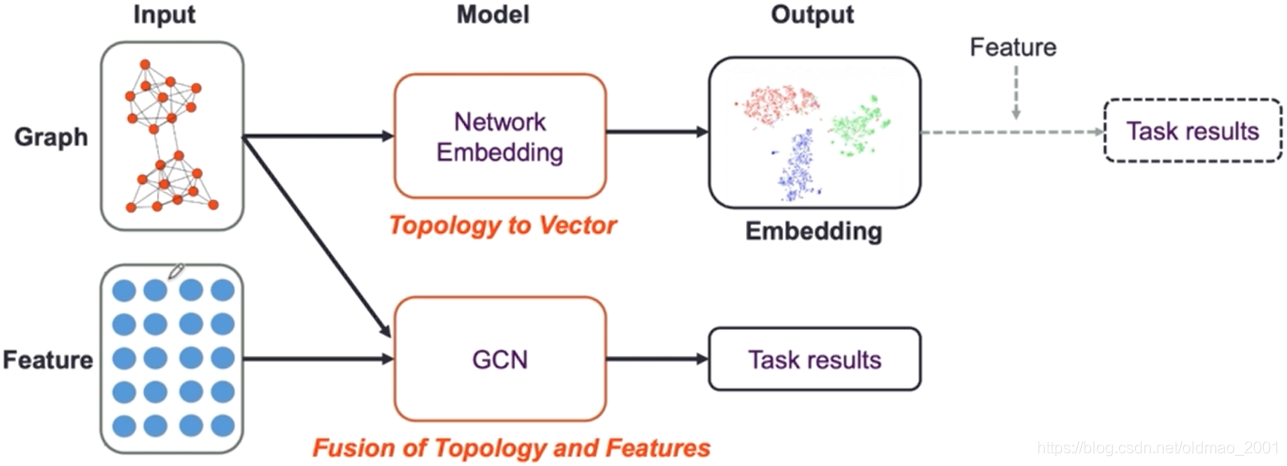
对于GCN的进一步理解如下:Fusing topology and features in the way of smoothing features with the assistance of topology. 就是摘要里面提到的既考虑了图结构信息,又考虑了节点特征信息。
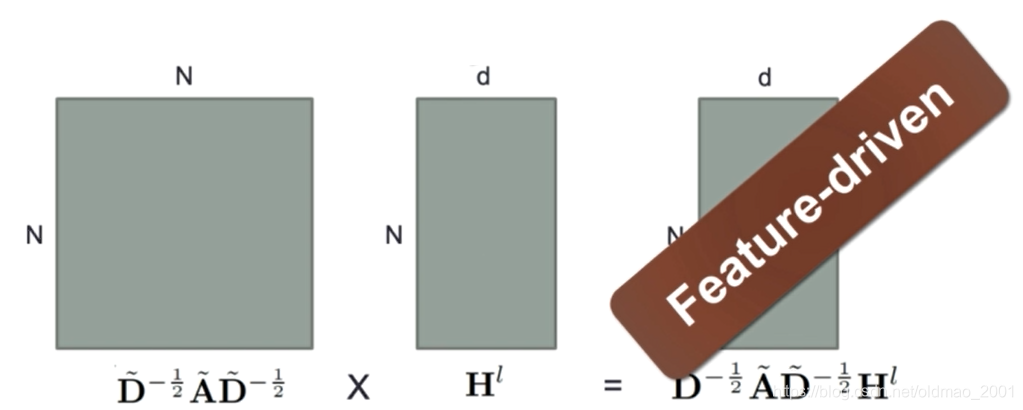
上面的公式1可以拆解如上图所示,第一项里面的三个东西都是N×N的,所以结果还是N×N的(之前的node2vec等随机游走算法都只利用这部分的信息),第一项乘的第二项就是节点的特征融合进来,最后的结果是N×d维的(如图所示可以理解为Feature-driven的模型),公式1中最后乘的
Θ
\Theta
Θ相当于对特征矩阵进行投影变换可以把d维变成d’维。
网上例子
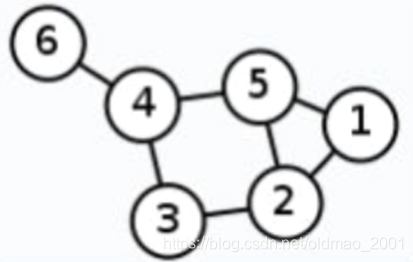
假设有这么一个图:
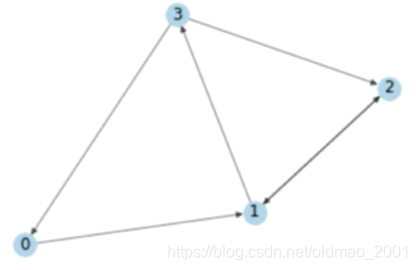
然后我们要根据公式1进行计算,先写出图的邻接矩阵:
A
=
[
0
1
0
0
0
0
1
1
0
1
0
0
1
0
1
0
]
A=\begin{bmatrix} 0 & 1& 0 & 0\\ 0 & 0&1 &1 \\ 0 & 1 &0 &0 \\ 1 & 0 & 1 & 0 \end{bmatrix}
A=
0001101001010100
然后加上节点本身的信息I(就是对角线为1的单位证):
A
~
=
A
+
I
=
[
1
1
0
0
0
1
1
1
0
1
1
0
1
0
1
1
]
\tilde A=A+I=\begin{bmatrix} 1 & 1& 0 & 0\\ 0 & 1&1 &1 \\ 0 & 1 &1 &0 \\ 1 & 0 & 1 & 1 \end{bmatrix}
A~=A+I=
1001111001110101
然后图的度矩阵为:
D
~
=
[
2
0
0
0
0
3
0
0
0
0
2
0
0
0
0
3
]
\tilde D=\begin{bmatrix} 2 & 0& 0 & 0\\ 0 & 3&0 &0 \\ 0 & 0 &2 &0 \\ 0 & 0 & 0 & 3 \end{bmatrix}
D~=
2000030000200003
然后两个
D
~
−
1
2
\tilde D^{-\frac{1}{2}}
D~−21实际上相当于
D
~
−
1
\tilde D^{-1}
D~−1:
D
~
−
1
=
[
1
2
0
0
0
0
1
3
0
0
0
0
1
2
0
0
0
0
1
3
]
\tilde D^{-1}=\begin{bmatrix} \cfrac{1}{2} & 0& 0 & 0\\ 0 & \cfrac{1}{3}&0 &0 \\ 0 & 0 &\cfrac{1}{2} &0 \\ 0 & 0 & 0 & \cfrac{1}{3} \end{bmatrix}
D~−1=
21000031000021000031
然后算:
D
~
−
1
⋅
A
~
=
[
1
2
0
0
0
0
1
3
0
0
0
0
1
2
0
0
0
0
1
3
]
[
1
1
0
0
0
1
1
1
0
1
1
0
1
0
1
1
]
=
[
1
2
1
2
0
0
0
1
3
1
3
1
3
0
1
2
1
2
0
1
3
0
1
3
1
3
]
\tilde D^{-1}\cdot \tilde A=\begin{bmatrix} \cfrac{1}{2} & 0& 0 & 0\\ 0 & \cfrac{1}{3}&0 &0 \\ 0 & 0 &\cfrac{1}{2} &0 \\ 0 & 0 & 0 & \cfrac{1}{3} \end{bmatrix}\begin{bmatrix} 1 & 1& 0 & 0\\ 0 & 1&1 &1 \\ 0 & 1 &1 &0 \\ 1 & 0 & 1 & 1 \end{bmatrix}=\begin{bmatrix} \cfrac{1}{2} & \cfrac{1}{2}& 0 & 0\\ 0 & \cfrac{1}{3}&\cfrac{1}{3} &\cfrac{1}{3} \\ 0 & \cfrac{1}{2}&\cfrac{1}{2} &0 \\ \cfrac{1}{3} & 0 & \cfrac{1}{3} & \cfrac{1}{3} \end{bmatrix}
D~−1⋅A~=
21000031000021000031
1001111001110101
=
21003121312100312131031031
可以看到每行的和为1,达到了一个normalization的效果。
假设图中4个节点的特征维度d=2,则有特征矩阵:
H
=
[
0
0
1
−
1
2
−
2
3
−
3
]
H=\begin{bmatrix} 0 & 0\\ 1 &-1 \\ 2 &-2 \\ 3 & -3 \end{bmatrix}
H=
01230−1−2−3
最后可以计算出结果(AB两个矩阵的乘积的第m行第n列的元素等于矩阵A的第m行的元素与矩阵B的第n列对应元素乘积之和。):
D
~
−
1
⋅
A
~
⋅
H
=
[
1
2
1
2
0
0
0
1
3
1
3
1
3
0
1
2
1
2
0
1
3
0
1
3
1
3
]
[
0
0
1
−
1
2
−
2
3
−
3
]
=
[
1
2
−
1
2
2
−
2
3
2
−
3
2
5
3
−
5
3
]
\tilde D^{-1}\cdot \tilde A\cdot H=\begin{bmatrix} \cfrac{1}{2} & \cfrac{1}{2}& 0 & 0\\ 0 & \cfrac{1}{3}&\cfrac{1}{3} &\cfrac{1}{3} \\ 0 & \cfrac{1}{2}&\cfrac{1}{2} &0 \\ \cfrac{1}{3} & 0 & \cfrac{1}{3} & \cfrac{1}{3} \end{bmatrix}\begin{bmatrix} 0 & 0\\ 1 &-1 \\ 2 &-2 \\ 3 & -3 \end{bmatrix}=\begin{bmatrix} \cfrac{1}{2} & -\cfrac{1}{2}\\ 2 &-2 \\ \cfrac{3}{2} &-\cfrac{3}{2} \\ \cfrac{5}{3} & -\cfrac{5}{3} \end{bmatrix}
D~−1⋅A~⋅H=
21003121312100312131031031
01230−1−2−3
=
2122335−21−2−23−35
原文例子
原文3.1节也给出了一个例子,一层GCN用的公式为:
A
^
=
D
~
−
1
2
A
~
D
~
−
1
2
\hat A= \tilde D^{-\frac{1}{2}}\tilde A\tilde D^{-\frac{1}{2}}
A^=D~−21A~D~−21
然后要乘上特征X和第一层参数
W
(
0
)
W^{(0)}
W(0)然后经过ReLU非线性变换,然后经过第二层(第二层的参数是
W
(
1
)
W^{(1)}
W(1)),然后接softmax,如果是Cora数据集应该是7分类:
Z
=
f
(
X
,
A
)
=
s
o
f
t
m
a
x
(
A
^
R
e
L
U
(
A
^
X
W
(
0
)
)
W
(
1
)
)
(2)
Z=f(X,A)=softmax(\hat AReLU(\hat AXW^{(0)})W^{(1)})\tag2
Z=f(X,A)=softmax(A^ReLU(A^XW(0))W(1))(2)
公式2中,第一层的计算为:
R
e
L
U
(
A
^
X
W
(
0
)
)
ReLU(\hat AXW^{(0)})
ReLU(A^XW(0))
第一层得到输出结果相当于第二层的输入中的新的特征
X
′
X'
X′
因此第二层相当于:
s
o
f
t
m
a
x
(
A
^
X
′
W
(
1
)
)
softmax(\hat AX'W^{(1)})
softmax(A^X′W(1))
最后得到的Z就是节点的embedding。
所以整个套娃操作就是按照AXW的套路走的。
最后的交叉熵损失函数为:
L
=
−
∑
l
∈
Y
L
∑
f
=
1
F
Y
l
f
ln
Z
l
f
L=-\sum_{l\in \texttt{Y}_{L}}\sum_{f=1}^FY_{lf}\ln Z_{lf}
L=−l∈YL∑f=1∑FYlflnZlf
这里最外面的求和下标代表半监督学习,只取了有label的部分点进行计算,
Y
l
f
Y_{lf}
Ylf则是代表ground truth,是一个独热编码,第二个求和代表的是softmax操作。
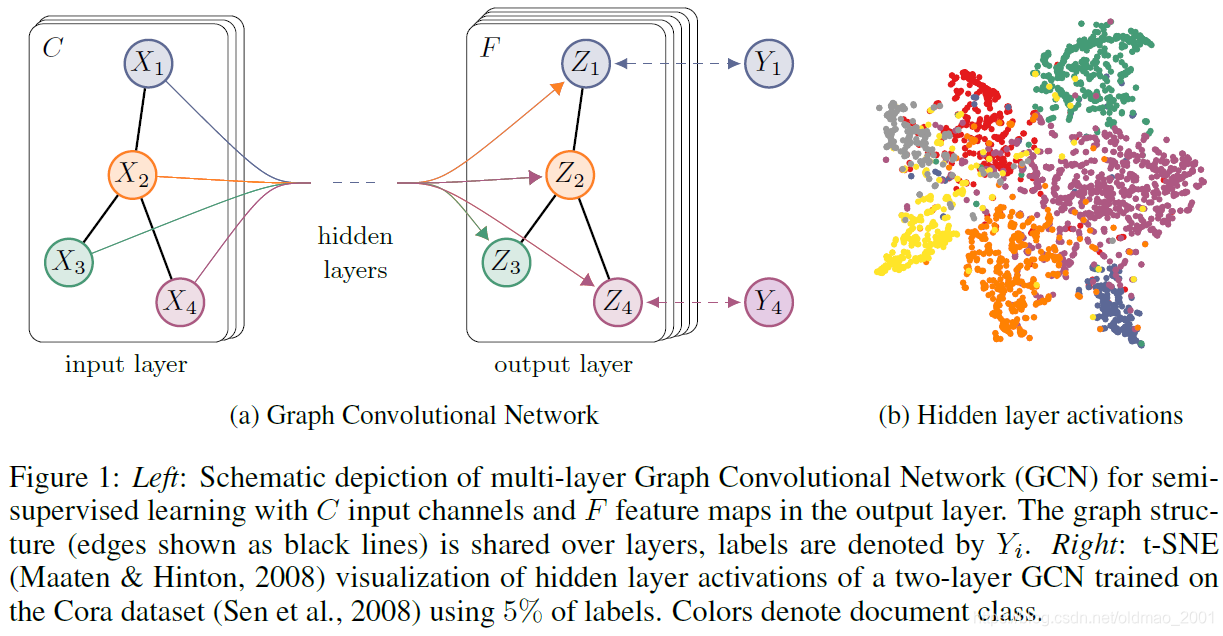
看图加深理解,中间通过两层GCN后输入是C维的,输出是F维的embedding是Z,只有
Z
1
Z_1
Z1和
Z
4
Z_4
Z4有标签,只用这两个来计算交叉熵loss
频域和空域Spatial vs Spectral
Two major approaches to build Graph CNNs
- Spatial Domain: Perform convolution in spatial domain similar to images(euclidean data) with shareable weight parameters.
· Spatial construction is usually more efficient but less principled.
· Spatial construction is usually more efficient but less principled. - Spectral Domain: Convert Graph data to spectral domain data by using the eigenvectors of laplacian operator on the graph data and perform learning on the transformed data.
· Spectral construction is more principled but usually slow. Computing Laplacian eigenvectors for large scale data couid be painful.
· Research tries to bridge the gap.(This paper GCN!)
细节一:R-GCN模型结构
这个是用在知识图谱的一个模型,知识图谱一般都是异质图,可以和之前学过的metapath联系起来看一下。
以点
i
i
i在
l
+
1
l+1
l+1层如何从第
l
l
l层计算过来的为例。
l
i
(
l
+
1
)
=
σ
(
∑
r
∈
R
∑
j
∈
N
i
r
1
c
i
,
r
W
r
(
l
)
h
j
(
l
)
+
W
0
(
l
)
h
j
(
l
)
)
(3)
l_i^{(l+1)}=\sigma\left(\sum_{r\in R}\sum_{j\in N_i^r}\cfrac{1}{c_{i,r}}W_r^{(l)}h_j^{(l)}+W_0^{(l)}h_j^{(l)}\right)\tag3
li(l+1)=σ
r∈R∑j∈Nir∑ci,r1Wr(l)hj(l)+W0(l)hj(l)
(3)
上式3中
W
0
(
l
)
W_0^{(l)}
W0(l)对应是节点自身的参数,
W
r
(
l
)
W_r^{(l)}
Wr(l)是邻居节点的参数
N
i
r
N_i^r
Nir表示点
i
i
i的所有邻居节点的集合,然后r代表邻居节点和当前节点的关系的分类(相当于边的分类),归一化项也体现了,按节点以及邻居类型进行归一化。
可以看到,边的类型越多(邻居节点的类型越多),那么每一层的参数也就越多,例如,我们的邻居类型有10种,那么每一层都有10个
W
(
l
)
W^{(l)}
W(l)参数,所以这里参数还加了下标r。
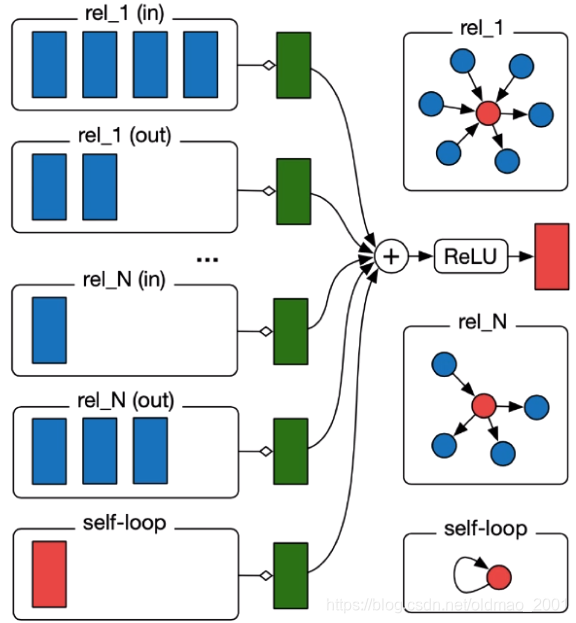
下面看图,图中的rel表示关系后面的数字代表关系的种类,可以看到对于关系1(rel_1)而言,有六个邻居节点,这里考虑的是有向图,因此还把这六个邻居分成了in和out的两类,下面考虑的关系N也是一样。最后还要加上节点本身的信息(红色那个self-loop)。
原文对这个公式的说明:
where
N
i
r
N^r_i
Nir denotes the set of neighbor indices of node
i
i
i under relation
r
∈
R
r ∈ R
r∈R.
c
i
,
r
c_{i,r}
ci,r is a problem-specific normalization constant that can either be learned or chosen in advance (such as
c
i
,
r
=
∣
N
i
r
∣
c_{i,r} = |N^r_i|
ci,r=∣Nir∣).
可以看下原文的2.1节
原文在这里:Modeling Relational Data with Graph Convolutional Networks
细节二:拉普拉斯矩阵Laplacian matrix
拉普拉斯算子
参考文献:https://zhuanlan.zhihu.com/p/85287578
拉普拉斯算子(Laplace Operator)是
n
n
n维欧几里得空间中的一个二阶微分算子,定义为梯度(
▽
f
\triangledown f
▽f)的散度(
▽
⋅
\triangledown\cdot
▽⋅)。
Δ
f
=
▽
2
f
=
▽
⋅
▽
f
=
d
i
v
(
g
r
a
d
f
)
\Delta f=\triangledown^2f=\triangledown\cdot\triangledown f=div(gradf)
Δf=▽2f=▽⋅▽f=div(gradf)
借用参考文献中的公式:
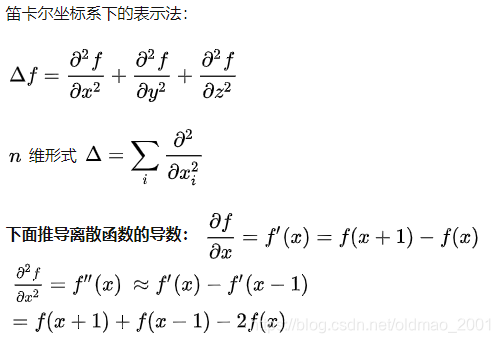
离散函数的导数可以看做是连续函数的求导(高数中的求极限操作)推导出来的结果。
以上是一维的散度的写法,下面看二维散度的写法,可以看到其中对x求二阶偏导的时候,y是不动的,然后例用上面的一维散度的公式进行展开。
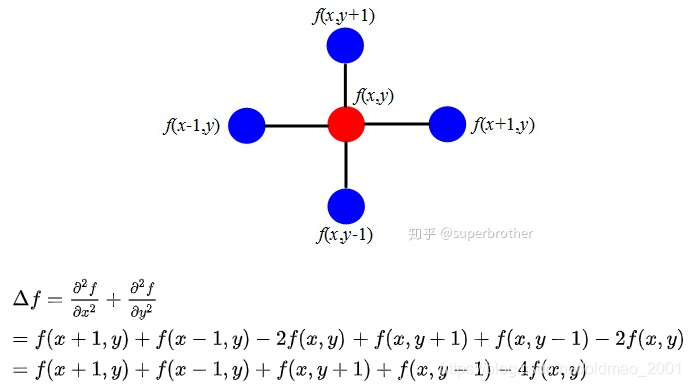
相当于计算红色点与周围四个方向的蓝色点的差的累加和,回过头看一维的拉普拉斯算子就是计算x与其前后点也就是x+1和x-1的差的和
拉普拉斯矩阵
对于图的拉普拉斯算子:
Δ
f
=
∑
j
∈
N
i
(
f
i
−
f
j
)
\Delta f=\sum_{j\in N_i}(f_i-f_j)
Δf=j∈Ni∑(fi−fj)
相当于求节点i与所有邻居节点之间的差,然后求和。
如果考虑边
E
i
j
E_{ij}
Eij的权重
W
i
j
W_{ij}
Wij的时候:
Δ
f
i
=
∑
j
∈
N
i
W
i
j
(
f
i
−
f
j
)
\Delta f_i=\sum_{j\in N_i}W_{ij}(f_i-f_j)
Δfi=j∈Ni∑Wij(fi−fj)
当
W
i
j
=
0
W_{ij}=0
Wij=0时,表示节点i,j不相邻,可以将非邻居节点的权重剔除,变成:
Δ
f
i
=
∑
j
∈
N
w
i
j
(
f
i
−
f
j
)
\Delta f_i=\sum_{j\in N}w_{ij}(f_i-f_j)
Δfi=j∈N∑wij(fi−fj)
展开括号:
=
∑
j
∈
N
w
i
j
f
i
−
∑
j
∈
N
w
i
j
f
j
=\sum_{j\in N}w_{ij}f_i-\sum_{j\in N}w_{ij}f_j
=j∈N∑wijfi−j∈N∑wijfj
第一项中
f
i
f_i
fi和求和符合无关,可以只算
∑
j
∈
N
w
i
j
=
d
i
\sum_{j\in N}w_{ij}=d_i
∑j∈Nwij=di,这个就是节点i的度
第二项可以写成向量内积的形式,
w
i
:
=
(
w
i
1
,
⋯
,
w
i
N
)
w_{i:}=(w_{i1},\cdots,w_{iN})
wi:=(wi1,⋯,wiN)是N维行向量;
f
=
(
f
1
⋮
f
N
)
f=\begin{pmatrix} f_1\\ \vdots\\ f_N\end{pmatrix}
f=
f1⋮fN
是N维列向量;
那么图中某个个节点i的拉普拉斯算子就写成了:
Δ
f
=
d
i
f
i
−
w
i
:
f
\Delta f=d_if_i-w_{i:}f
Δf=difi−wi:f
对于图中的N个节点:
Δ
f
=
(
Δ
f
1
⋮
Δ
f
N
)
=
(
d
1
f
1
−
w
1
:
f
⋮
d
N
f
N
−
w
N
:
f
)
\Delta f=\begin{pmatrix} \Delta f_1\\ \vdots\\ \Delta f_N\end{pmatrix}=\begin{pmatrix} d_1f_1-w_{1:}f\\ \vdots\\ d_Nf_N-w_{N:}f\end{pmatrix}
Δf=
Δf1⋮ΔfN
=
d1f1−w1:f⋮dNfN−wN:f
可以写成一个N×N的矩阵
=
(
d
1
⋯
0
⋮
⋱
⋮
0
⋯
d
N
)
f
−
(
w
1
:
⋮
w
N
:
)
f
=\begin{pmatrix} d_1&\cdots&0\\ \vdots&\ddots&\vdots\\ 0&\cdots&d_N\end{pmatrix}f-\begin{pmatrix} w_{1:}\\ \vdots\\ w_{N:}\end{pmatrix}f
=
d1⋮0⋯⋱⋯0⋮dN
f−
w1:⋮wN:
f
可以写成:
d
i
a
g
(
d
i
)
f
−
W
f
=
(
D
−
W
)
f
=
L
f
diag(d_i)f-Wf=(D-W)f=Lf
diag(di)f−Wf=(D−W)f=Lf
对于图的拉普拉斯算子的第i项可以写成:
(
L
f
)
(
i
)
=
∑
j
∈
N
i
W
i
,
j
[
f
(
i
)
−
f
(
j
)
]
(Lf)(i)=\sum_{j\in N_i}W_{i,j}[f(i)-f(j)]
(Lf)(i)=j∈Ni∑Wi,j[f(i)−f(j)]
它的意思就是点i和其所属邻居的差的求和。上式也称为图的拉普拉斯矩阵。
下面来看图的拉普拉斯矩阵的其他定义方式:
D:diagonal matrix whose
i
t
h
i^{th}
ith diagnal element
d
i
d_i
di is equal to the sum of the weights of all the edges incident to
v
i
v_i
vi
上面定义的拉普拉斯矩阵可以叫:combinatorial graph Laplacian/ non-normalized graph Laplacian:
L
=
D
−
W
(4)
L=D-W\tag4
L=D−W(4)
下面一种是和GCN中的公式很像的叫:normalized graph Laplacian/ symmetric normalized Laplacian:
L
~
=
D
−
1
2
L
D
−
1
2
=
I
N
−
D
−
1
2
W
D
−
1
2
(5)
\tilde L=D^{-\frac{1}{2}}LD^{-\frac{1}{2}}=I_N-D^{-\frac{1}{2}}WD^{-\frac{1}{2}}\tag5
L~=D−21LD−21=IN−D−21WD−21(5)
上式最后那里是把上上个公式的L带到里面并展开的结果。上式中
I
N
I_N
IN是N×N的identity matrix单位矩阵(对角线为1,其他位置都是0的那种矩阵)。
还有一种叫:asymmetric graph Laplacian:
L
a
=
I
N
−
P
(6)
L_a=I_N-P\tag6
La=IN−P(6)
其中
P
=
D
−
1
W
P=D^{-1}W
P=D−1W是随机游走矩阵,其每个元素
P
i
,
j
P_{i,j}
Pi,j表示图中顶点
v
i
v_i
vi到
v
j
v_j
vj游走(用马尔科夫方法)的概率。
说明:第5和第6分别处理的对称矩阵和非对称矩阵的情况。
下面看一下拉普拉斯矩阵的公式4的每个位置取值,这里我们假设所有边的权重都是1,那么就意味在W就是邻接矩阵,有边相连的位置就是1,否则就是0。那么拉普拉斯矩阵某个位置的取值为:
L
(
u
,
v
)
=
{
d
v
if
u
=
v
(
d
v
is the degree of node
v
)
−
1
if
u
≠
v
,
(
u
,
v
)
∈
E
0
otherwise
(7)
L(u,v)=\begin{cases} & d_v\quad\text{if } u=v(d_v\text{ is the degree of node }v) \\ & -1\space\space\text{ if } u\neq v,(u,v)\in E \\ &0\quad\space\text{ otherwise } \end{cases}\tag7
L(u,v)=⎩
⎨
⎧dvif u=v(dv is the degree of node v)−1 if u=v,(u,v)∈E0 otherwise (7)
第一种情况,当
u
=
v
u=v
u=v,这个时候就是指的同一个节点的情况,那么邻接矩阵这个位置为0,因此只有
d
v
d_v
dv这项;
第二种情况,当
u
≠
v
,
(
u
,
v
)
∈
E
u\neq v,(u,v)\in E
u=v,(u,v)∈E,这个时候表明u和v是两个不同节点,而且二者有边相连,那么这个时候其邻接矩阵的这个位置值为1,但是在度矩阵D中,肯定是不在对角线上,因此D这项为0(度矩阵只有对角线上有值,该值为该节点的度),因此0-1=-1,最后结果就是-1;
第三种情况,u和v没有边相连,邻接矩阵位置上值为0,也不在D的对角线上,D也为0,最后结果就是0.
对于公式5,拉普拉斯矩阵的取值为:
L
~
(
u
,
v
)
=
{
1
if
u
=
v
,
d
v
≠
0
(
d
v
is the degree of node
v
)
−
1
d
u
d
v
if
u
≠
v
,
(
u
,
v
)
∈
E
0
otherwise
(8)
\tilde L(u,v)=\begin{cases} & 1\quad\text{if } u=v,d_v\ne0 \space (d_v\text{ is the degree of node }v) \\ & -\cfrac{1}{\sqrt{d_ud_v}}\space\space\text{ if } u\neq v,(u,v)\in E \\ &0\quad\space\text{ otherwise } \end{cases}\tag8
L~(u,v)=⎩
⎨
⎧1if u=v,dv=0 (dv is the degree of node v)−dudv1 if u=v,(u,v)∈E0 otherwise (8)
公式5可以理解为对公式4除以一个
d
v
d_v
dv进行归一化,因此就是把上式7每种情况除一个
d
v
d_v
dv就ok了。
拉普拉斯矩阵的性质
一般化的拉普拉斯矩阵(generalized graph Laplacians):归一化normalized和非归一化non-normalized的拉普拉斯矩阵都可以统称为generalized graph Laplacians.
1.对于generalized graph Laplacians,如果图中两个顶点有边相连,则矩阵对应位置为负值(情况二),如果两个顶点没有边相连,则矩阵对应位置为0(情况三),如果是对角线(同一个节点),那么取值可以是任意实数(情况一)
2.对于
L
L
L和
L
~
\tilde L
L~都有相同的特征值,这个很重要,要对矩阵进行特征分解才能得到图频域的结果。
3.图的拉普拉斯矩阵还可以叫:admittance matrix, discrete Laplacian or Kirchohoff matrix.
4.对于某个图的拉普拉斯矩阵要使用归一化normalized或非归一化non-normalized的形态,并没有明确规定。
拉普拉斯矩阵例子
An example of non-normalized
L
L
L with
W
=
A
W=A
W=A,
L
=
D
−
A
L=D-A
L=D−A:
度矩阵:
D
=
(
2
0
0
0
0
0
0
3
0
0
0
0
0
0
2
0
0
0
0
0
0
3
0
0
0
0
0
0
3
0
0
0
0
0
0
1
)
D=\begin{pmatrix} 2 & 0& 0&0 & 0 & 0\\ 0 & 3& 0&0 & 0 & 0 \\ 0 & 0& 2&0 & 0 & 0 \\ 0 & 0& 0&3 & 0 & 0 \\ 0 & 0& 0&0 & 3 & 0\\ 0 & 0& 0&0 & 0 & 1 \end{pmatrix}
D=
200000030000002000000300000030000001
邻接矩阵:
A
=
(
0
1
0
0
1
0
1
0
1
0
1
0
0
1
0
1
0
0
0
0
1
0
1
1
1
1
0
1
0
0
0
0
0
1
0
0
)
A=\begin{pmatrix} 0 & 1& 0&0 & 1 & 0\\ 1 & 0& 1&0 & 1 & 0 \\ 0 & 1& 0&1 & 0 & 0 \\ 0 & 0& 1&0 & 1 & 1 \\ 1 & 1& 0&1 & 0 & 0\\ 0 & 0& 0&1 & 0 & 0 \end{pmatrix}
A=
010010101010010100001011110100000100
拉普拉斯矩阵(没有归一化的):
L
=
D
−
A
(
2
−
1
0
0
−
1
0
−
1
3
−
1
0
−
1
0
0
−
1
2
−
1
0
0
0
0
−
1
3
−
1
−
1
−
1
−
1
0
−
1
3
0
0
0
0
−
1
0
−
1
)
L=D-A\left( \begin{array}{rrrrrr} 2 & -1& 0&0 & -1 & 0\\ -1 & 3& -1&0 & -1 & 0 \\ 0 & -1& 2&-1 & 0 & 0 \\ 0 & 0& -1&3 & -1 & -1 \\ -1 & -1& 0&-1 & 3 & 0\\ 0 & 0& 0&-1 & 0 & -1 \end{array} \right)
L=D−A
2−100−10−13−10−100−12−10000−13−1−1−1−10−130000−10−1
细节三:图的频域变换
图的拉普拉斯矩阵性质:
(normalized/non-normalized)graph Laplacian(
L
L
L,or
L
~
\tilde L
L~)is a real symmetric matrix(看例子就知道,拉普拉斯矩阵是一个对称矩阵), with a complete set of orthonormal eigenvectors(并且有一组正交特征向量), which we denote by
{
u
l
}
\{u_l\}
{ul} where
l
=
0
,
1
,
⋯
,
N
−
1
l=0,1,\cdots,N-1
l=0,1,⋯,N−1.
其中
{
u
l
}
\{u_l\}
{ul}对应一个非负实数特征值
{
λ
l
}
\{\lambda_l\}
{λl}
因此,根据线性代数的性质可知:
L
u
l
=
λ
l
u
l
(9)
Lu_l=\lambda_lu_l\tag9
Lul=λlul(9)
图有多少个连通分量则有多少个特征值等于0。对于一个连通图,则只有一个特征值为0。
因此对于一个连通图,所有的特征值可以做如下排列:
0
=
λ
0
≤
λ
1
⋯
≤
λ
N
−
1
0=\lambda_0\leq\lambda_1\cdots\leq\lambda_{N-1}
0=λ0≤λ1⋯≤λN−1
整个特征值可以表示为:
σ
(
L
)
=
{
λ
0
,
λ
1
,
⋯
,
λ
N
−
1
}
\sigma(L)=\{\lambda_0,\lambda_1,\cdots,\lambda_{N-1}\}
σ(L)={λ0,λ1,⋯,λN−1}
拉普拉斯矩阵的特征分解也可以写成矩阵的形式:
L
=
U
(
λ
0
0
⋯
0
0
λ
1
⋯
0
⋮
⋮
⋱
⋮
0
0
⋯
λ
N
−
1
)
U
−
1
=
U
(
λ
0
0
⋯
0
0
λ
1
⋯
0
⋮
⋮
⋱
⋮
0
0
⋯
λ
N
−
1
)
U
T
L=U\left( \begin{array}{cccc} \lambda_0 & 0& \cdots&0 \\ 0 & \lambda_1& \cdots&0 \\ \vdots & \vdots& \ddots&\vdots \\ 0 & 0& \cdots&\lambda_{N-1} \end{array} \right)U^{-1}=U\left( \begin{array}{cccc} \lambda_0 & 0& \cdots&0 \\ 0 & \lambda_1& \cdots&0 \\ \vdots & \vdots& \ddots&\vdots \\ 0 & 0& \cdots&\lambda_{N-1} \end{array} \right)U^{T}
L=U
λ00⋮00λ1⋮0⋯⋯⋱⋯00⋮λN−1
U−1=U
λ00⋮00λ1⋮0⋯⋯⋱⋯00⋮λN−1
UT
上式中
λ
i
\lambda_i
λi是特征值,
U
=
(
u
0
⃗
,
u
1
⃗
,
⋯
,
u
⃗
N
−
1
)
U=(\vec{u_0},\vec{u_1},\cdots,\vec{u}_{N-1})
U=(u0,u1,⋯,uN−1)(这里下标是从0开始,后面一小节下标从1开始,总的维度都是N),
u
i
⃗
\vec{u_i}
ui是列向量,并且是单位特征向量,
U
−
1
U^{-1}
U−1可写成
U
T
U^{T}
UT(因为
U
U
T
=
I
N
UU^T=I_N
UUT=IN,二者是正交向量)。
如果对输入信号
f
i
n
f_{in}
fin做拉普拉斯变化,就是:
f
o
u
t
=
h
^
(
L
)
f
i
n
f_{out}=\hat h(L)f_{in}
fout=h^(L)fin
其中
h
^
(
L
)
=
U
(
h
^
(
λ
0
)
0
⋯
0
0
h
^
(
λ
1
)
⋯
0
⋮
⋮
⋱
⋮
0
0
⋯
h
^
(
λ
N
−
1
)
)
U
T
\hat h(L)=U\left( \begin{array}{cccc} \hat h(\lambda_0) & 0& \cdots&0 \\ 0 & \hat h(\lambda_1)& \cdots&0 \\ \vdots & \vdots& \ddots&\vdots \\ 0 & 0& \cdots&\hat h(\lambda_{N-1}) \end{array} \right)U^{T}
h^(L)=U
h^(λ0)0⋮00h^(λ1)⋮0⋯⋯⋱⋯00⋮h^(λN−1)
UT
关于特征向量看这里、矩阵分解可以看这里。
图的频域变换Graph spectral
将图的拉普拉斯变换和图的频域变换做一个类比。
傅里叶变换(将信号从时域变换到频域):
X
(
f
)
=
∫
−
∞
∞
x
(
t
)
e
−
j
2
π
f
t
d
t
X(f)=\int_{-\infty}^\infty x(t)e^{-j2\pi ft}dt
X(f)=∫−∞∞x(t)e−j2πftdt
反向傅里叶变换:
x
(
t
)
=
∫
−
∞
∞
X
(
f
)
e
j
2
π
f
t
d
f
x(t)=\int_{-\infty}^\infty X(f)e^{j2\pi ft}df
x(t)=∫−∞∞X(f)ej2πftdf
总体可以写成:
x
(
t
)
⇌
X
(
f
)
x(t)\rightleftharpoons X(f)
x(t)⇌X(f)
其中
2
π
f
=
ω
2\pi f=\omega
2πf=ω
拉普拉斯算子可以理解成一种变换
上面我们推出来的公式9可以写成:
A
v
=
λ
v
(10)
Av=\lambda v\tag{10}
Av=λv(10)
将拉普拉斯算子与傅里叶变换中的e那项相乘(这一步结果可以参考拉普拉斯算子的定义,就是求散度,二阶导数):
Δ
e
−
i
ω
t
=
∂
2
∂
t
2
e
−
i
ω
t
\Delta e^{-i\omega t}=\cfrac{\partial^2 }{\partial t^2}e^{-i\omega t}
Δe−iωt=∂t2∂2e−iωt
对上面的复合函数求导得:
Δ
e
−
i
ω
t
=
−
ω
2
e
−
i
ω
t
(11)
\Delta e^{-i\omega t}=-\omega^2e^{-i\omega t}\tag{11}
Δe−iωt=−ω2e−iωt(11)
对比公式10公式11中可以看到:
10中的特征向量
v
v
v相当于11中的
e
−
i
ω
t
e^{-i\omega t}
e−iωt;
10中的拉普拉斯矩阵
A
A
A相当于11中的
Δ
\Delta
Δ;
10中的特征值
λ
\lambda
λ相当于11中的
ω
2
\omega^2
ω2。
因此,图信号到图频域的变换就可以写为:
F
(
λ
l
)
=
f
^
(
λ
l
)
=
∑
i
=
1
N
f
(
i
)
u
l
∗
(
i
)
(12)
F(\lambda_l)=\hat f(\lambda_l)=\sum_{i=1}^Nf(i)u_l^*(i)\tag{12}
F(λl)=f^(λl)=i=1∑Nf(i)ul∗(i)(12)
反过来:
f
(
i
)
=
∑
l
=
1
N
f
^
(
λ
l
)
u
l
(
i
)
(13)
f(i)=\sum_{l=1}^N\hat f(\lambda_l)u_l(i)\tag{13}
f(i)=l=1∑Nf^(λl)ul(i)(13)
公式12可以写成矩阵的形式:
(
f
^
(
λ
1
)
f
^
(
λ
2
)
⋮
f
^
(
λ
N
)
)
=
(
u
1
(
1
)
u
1
(
2
)
⋯
u
1
(
N
)
u
2
(
1
)
u
2
(
2
)
⋯
u
2
(
N
)
⋮
⋮
⋱
⋮
u
N
(
1
)
u
N
(
2
)
⋯
u
N
(
N
)
)
(
f
(
1
)
f
(
2
)
⋮
f
(
N
)
)
\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_N)\end{pmatrix}=\begin{pmatrix} u_1(1) & u_1(2) & \cdots &u_1(N) \\ u_2(1) & u_2(2)& \cdots &u_2(N)\\ \vdots & \vdots & \ddots &\vdots \\ u_N(1) & u_N(2) & \cdots &u_N(N) \end{pmatrix}\begin{pmatrix} f(1)\\ f(2)\\ \vdots\\ f(N)\end{pmatrix}
f^(λ1)f^(λ2)⋮f^(λN)
=
u1(1)u2(1)⋮uN(1)u1(2)u2(2)⋮uN(2)⋯⋯⋱⋯u1(N)u2(N)⋮uN(N)
f(1)f(2)⋮f(N)
然后写成向量的形式:
f
^
=
U
T
f
\hat f=U^Tf
f^=UTf
同理,公式13可以写成矩阵的形式:
(
f
(
1
)
f
(
2
)
⋮
f
(
N
)
)
=
(
u
1
(
1
)
u
1
(
2
)
⋯
u
1
(
N
)
u
2
(
1
)
u
2
(
2
)
⋯
u
2
(
N
)
⋮
⋮
⋱
⋮
u
N
(
1
)
u
N
(
2
)
⋯
u
N
(
N
)
)
(
f
^
(
λ
1
)
f
^
(
λ
2
)
⋮
f
^
(
λ
N
)
)
\begin{pmatrix} f(1)\\ f(2)\\ \vdots\\ f(N)\end{pmatrix}=\begin{pmatrix} u_1(1) & u_1(2) & \cdots &u_1(N) \\ u_2(1) & u_2(2)& \cdots &u_2(N)\\ \vdots & \vdots & \ddots &\vdots \\ u_N(1) & u_N(2) & \cdots &u_N(N) \end{pmatrix}\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_N)\end{pmatrix}
f(1)f(2)⋮f(N)
=
u1(1)u2(1)⋮uN(1)u1(2)u2(2)⋮uN(2)⋯⋯⋱⋯u1(N)u2(N)⋮uN(N)
f^(λ1)f^(λ2)⋮f^(λN)
然后写成向量的形式:
f
=
U
T
f
^
f=U^T\hat f
f=UTf^
图频域变换证明
通常图频域变换的公式写为:
(
f
∗
h
)
G
=
U
(
(
U
T
h
)
⊙
(
U
T
f
)
)
(14)
(f*h)_G=U((U^Th)\odot (U^Tf))\tag{14}
(f∗h)G=U((UTh)⊙(UTf))(14)
里面是两个图转频域的变化进行点乘,然后再转换回图。
下面证明公式14与下式等价
(
f
∗
h
)
G
=
U
(
h
^
(
λ
1
)
⋱
h
^
(
λ
n
)
)
U
T
f
(15)
(f*h)_G=U\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}U^Tf\tag{15}
(f∗h)G=U
h^(λ1)⋱h^(λn)
UTf(15)
我们将图信号记为一个列向量:
f
=
(
h
(
1
)
h
(
2
)
⋮
h
(
n
)
)
f=\begin{pmatrix} h(1)\\ h(2)\\ \vdots\\ h(n)\end{pmatrix}
f=
h(1)h(2)⋮h(n)
另外一个图信号,实际上是图卷积的卷积核,可以记为:
h
=
(
h
(
λ
1
)
h
(
λ
2
)
⋮
h
(
λ
n
)
)
h=\begin{pmatrix} h(\lambda_1)\\ h(\lambda_2)\\ \vdots\\ h(\lambda_n)\end{pmatrix}
h=
h(λ1)h(λ2)⋮h(λn)
将上面两个信号通过下面两个式子进行变化,得到图频域信号:
f
^
(
λ
l
)
=
∑
i
=
1
N
f
(
i
)
u
l
(
i
)
,
h
^
(
λ
l
)
=
∑
i
=
1
N
h
(
i
)
u
l
(
i
)
\hat f(\lambda_l)=\sum_{i=1}^Nf(i)u_l(i), \quad \hat h(\lambda_l)=\sum_{i=1}^Nh(i)u_l(i)
f^(λl)=i=1∑Nf(i)ul(i),h^(λl)=i=1∑Nh(i)ul(i)
堆叠写成矩阵的形式:
f
^
=
U
T
f
,
h
^
=
U
T
h
\hat f=U^Tf,\quad \hat h=U^Th
f^=UTf,h^=UTh
最后频域信号可以写为:
f
^
=
(
f
^
(
λ
1
)
f
^
(
λ
2
)
⋮
f
^
(
λ
n
)
)
,
h
^
=
(
h
^
(
λ
1
)
h
^
(
λ
2
)
⋮
h
^
(
λ
n
)
)
\hat f=\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_n)\end{pmatrix},\quad \hat h=\begin{pmatrix} \hat h(\lambda_1)\\ \hat h(\lambda_2)\\ \vdots\\ \hat h(\lambda_n)\end{pmatrix}
f^=
f^(λ1)f^(λ2)⋮f^(λn)
,h^=
h^(λ1)h^(λ2)⋮h^(λn)
比较公式14和15,右边第一项是U,要证明的就是后面部分要相等:
(
h
^
(
λ
1
)
⋱
h
^
(
λ
n
)
)
U
T
f
=
(
U
T
h
)
⊙
(
U
T
f
)
\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}U^Tf=(U^Th)\odot (U^Tf)
h^(λ1)⋱h^(λn)
UTf=(UTh)⊙(UTf)
上式中左边的
U
T
f
U^Tf
UTf,实际上就是把
f
f
f转换为频域
f
^
\hat f
f^,把上面求出的频域结果带过来,左边可以写为:
(
h
^
(
λ
1
)
⋱
h
^
(
λ
n
)
)
U
T
f
=
(
h
^
(
λ
1
)
⋱
h
^
(
λ
n
)
)
f
^
=
(
h
^
(
λ
1
)
⋱
h
^
(
λ
n
)
)
(
f
^
(
λ
1
)
f
^
(
λ
2
)
⋮
f
^
(
λ
n
)
)
(16)
\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}U^Tf=\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}\hat f=\begin{pmatrix} \hat h(\lambda_1)&&\\ &\ddots&\\ &&\hat h(\lambda_n)\\ \end{pmatrix}\begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_n)\end{pmatrix}\tag{16}
h^(λ1)⋱h^(λn)
UTf=
h^(λ1)⋱h^(λn)
f^=
h^(λ1)⋱h^(λn)
f^(λ1)f^(λ2)⋮f^(λn)
(16)
同理,右边也是将
f
f
f转换为频域
f
^
\hat f
f^,
h
h
h转换为频域
h
^
\hat h
h^:
(
U
T
h
)
⊙
(
U
T
f
)
=
h
^
⊙
f
^
=
(
h
^
(
λ
1
)
h
^
(
λ
2
)
⋮
h
^
(
λ
n
)
)
⊙
(
f
^
(
λ
1
)
f
^
(
λ
2
)
⋮
f
^
(
λ
n
)
)
(17)
(U^Th)\odot (U^Tf)=\hat h\odot \hat f=\begin{pmatrix} \hat h(\lambda_1)\\ \hat h(\lambda_2)\\ \vdots\\ \hat h(\lambda_n)\end{pmatrix}\odot \begin{pmatrix} \hat f(\lambda_1)\\ \hat f(\lambda_2)\\ \vdots\\ \hat f(\lambda_n)\end{pmatrix}\tag{17}
(UTh)⊙(UTf)=h^⊙f^=
h^(λ1)h^(λ2)⋮h^(λn)
⊙
f^(λ1)f^(λ2)⋮f^(λn)
(17)
公式16的矩阵相乘与点乘结果是一样的,因为第一个矩阵除了对角线都是0。
小结
Starting from signal processing:
Recall that: The Laplacian is indeed diagonalized by the Fourier basis (the orthonormal eigenvectors)
U
=
[
u
0
,
u
1
,
…
,
u
N
−
1
]
∈
R
N
×
N
U=[u_0, u_1,…, u_{N-1}]\in R^{N\times N}
U=[u0,u1,…,uN−1]∈RN×N.
拉普拉斯矩阵实际上就是傅里叶基(就是一组正交特征向量),上式中是拉普拉斯矩阵的N个特征向量
Let
Λ
=
d
i
a
g
(
[
λ
0
,
⋯
,
λ
N
−
1
]
)
\Lambda=diag([\lambda_0,\cdots,\lambda_{N-1}])
Λ=diag([λ0,⋯,λN−1]), then we have
L
=
U
Λ
U
T
L=U\Lambda U^T
L=UΛUT.
如果将特征值写成对角线矩阵,则拉普拉斯特征变化就可以写成上面的式子。
The graph Fourier transform of a signal
x
∈
R
N
x\in R^N
x∈RN is then defined as
x
^
U
T
x
∈
R
N
\hat xU^Tx\in R^N
x^UTx∈RN, with inverse
x
=
U
x
^
x=U\hat x
x=Ux^. This transformation enableds the formation of fundamental operations. such as filtering, just as on Euclidean spaces.
图的频域变换和图的频域反变化如上面两个公式所示。
Recall that:
X
⊗
Y
=
F
o
u
r
i
e
r
i
n
v
e
r
s
e
(
F
o
u
r
i
e
r
(
X
)
⊙
F
o
u
r
i
e
r
(
Y
)
)
X\otimes Y=Fourier_{inverse}(Fourier(X)\odot Fourier(Y))
X⊗Y=Fourierinverse(Fourier(X)⊙Fourier(Y))
就是公式14
Definition of convolutional operator:
(
f
∗
h
)
∗
g
=
U
(
(
U
T
h
)
⊙
(
U
T
f
)
)
(f*h)_{*\mathfrak{g}}=U((U^Th)\odot (U^Tf))
(f∗h)∗g=U((UTh)⊙(UTf))
未完,点我看下篇



















 829
829

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











