




这篇论文是之前那篇Naure牙齿分割论文的前身吧,那篇论文中用到的方法有在这里提到。
目录
摘要
从CBCT图像中自动准确地分割单个牙齿,即牙齿实例分割,是计算机辅助牙科的重要步骤。以往的研究通常忽略了牙齿丰富的形态学特征,如牙根尖,这对成功的治疗结果至关重要。本文提出了一个基于两阶段学习的框架,该框架明确地利用分层牙齿形态表示提供的全面几何指导进行牙齿实例分割。给定三维CBCT输入图像,我们的方法首先学习提取牙齿的质心和骨架,分别用于识别每个牙齿的大致位置和拓扑结构。基于第一步的输出,进一步设计了一种多任务学习机制,通过同时回归边界和根尖作为辅助任务来估计每个牙齿的体积掩模。
广泛的评估、消融研究以及与现有方法的比较表明,我们的方法实现了最先进的分割性能,特别是在具有挑战性的牙齿部位(即牙根和边界)周围。这些结果表明我们的框架在现实世界的临床场景中具有潜在的适用性。
1 介绍
计算机辅助设计(CAD)已广泛应用于数字牙科的诊断、修复和正畸治疗计划。在这些过程中,通常从锥形束计算机断层扫描(CBCT)图像中分割的3D牙齿模型[4,5]对于帮助牙医拔牙、种植或重新排列牙齿至关重要。在临床实践中,牙医需要从CBCT图像中逐片手动标记每颗牙齿,这既费力又耗时,而且高度依赖于操作员的经验。因此,在实际应用中需要一种准确的、全自动的方法从牙齿CBCT图像中分割出单个牙齿。
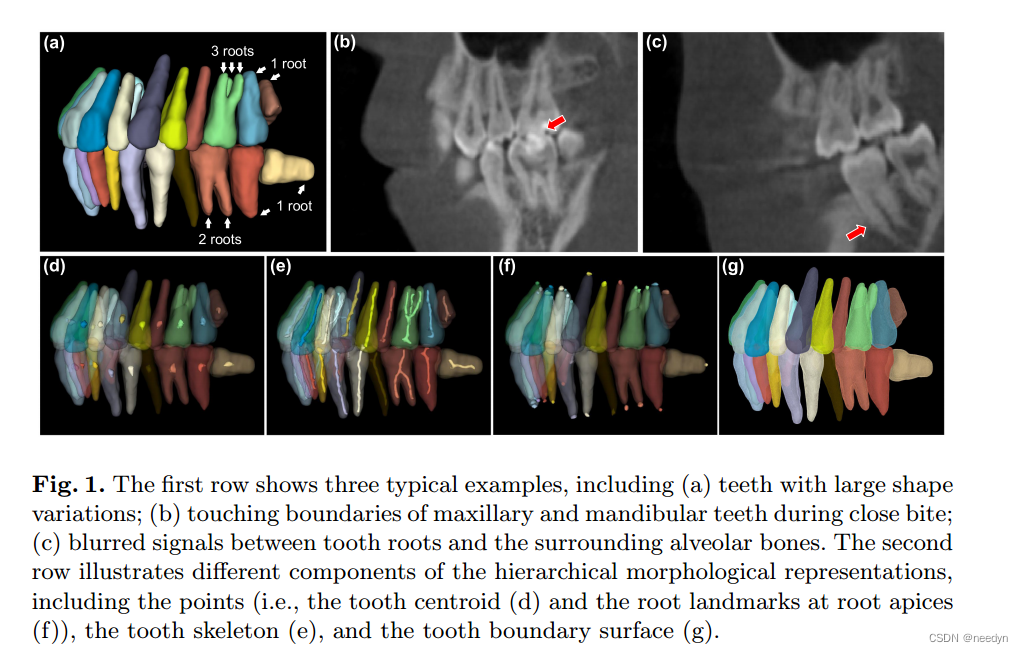
然而,自动分割单个牙齿仍然是一个具有挑战性的任务,因为牙齿在其几何形状上表现出很大的变化。例如,上颌磨牙通常有三根,而下颌磨牙通常有两根8。除了一般规则之外,还可以发现臼齿单根的特殊情况(图1(a)),这种差异在现实世界的诊所中相当普遍。即使是最先进的基于学习的方法[4,5,14]也常常无法处理如此复杂的情况。这主要是因为这些方法对牙齿只采用简单的表示(例如,牙齿质心或边界框),因此无法捕获每个牙齿的详细形状变化。在图像对比度较低的区域,如近距离咬合时接触牙齿的共同边界(图1(b))和牙根与其周围牙槽骨之间的界面(图1©),这种情况更严重。传统的方法[1,2,6,7,9,11,15]或基于学习的网络[4,5,14]都无法在这些区域正确地将牙齿从背景组织中分割出来,尽管牙根信息在正畸治疗中至关重要,可以确保牙齿在运动过程中根尖不会穿透周围的牙槽骨。
在本文中,我们提出了一种层次形态表示来捕捉复杂的牙齿形状和重要的牙齿特征。具体来说,这种分层形态表示由齿心和根尖(即点)、骨架、边界表面和体积组成(图1(d) - (g), (a))。在此基础上,设计了一种基于粗到精学习的牙齿实例自动准确分割框架。给定三维输入CBCT图像,为了捕获所有单个牙齿的位置和变化的拓扑结构,特别是在多根区域,设计了第一阶段(粗层次)的神经网络来分别预测牙齿质心和骨骼。然后,在第二阶
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 835
835

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









