



1) roscore
2)roslaunch usb_cam usb_cam-test1.launch
3)rosrun camera_calibration cameracalibrator.py --approximate 0.1 --size 12x8 --square 0.02 right:=/camera1/usb_cam1/image_raw left:=/camera2/usb_cam2/image_raw right_camera:=/camera1/usb_cam1 left_camera:=/camera2/usb_cam2
4)roslaunch 文件如下
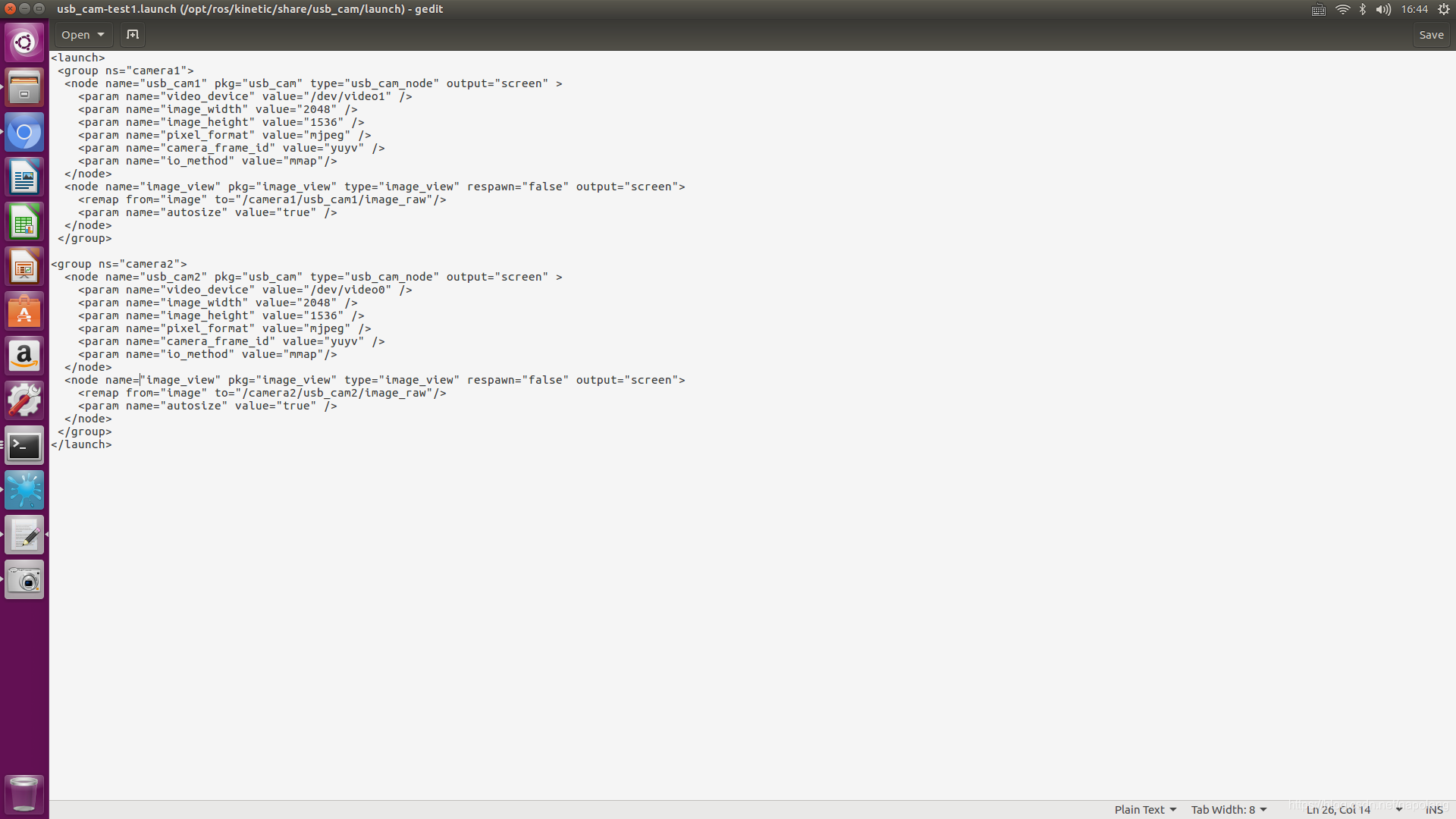
<launch>
<group ns="camera1">
<node name="usb_cam1" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="3840" />
<param name="image_height" value="2160" />
<param name="pixel_format" value="mjpeg" />
<param name="camera_frame_id" value="yuyv" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/camera1/usb_cam1/image_raw"/>
<param name="autosize" value="true" />
</node>
</group>
<group ns="camera2">
<node name="usb_cam2" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="3840" />
<param name="image_height" value="2160" />
<param name="pixel_format" value="mjpeg" />
<param name="camera_frame_id" value="yuyv" />
1,1 Top

















 2204
2204

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









