




 论文探讨了如何通过MergePath策略并行化两个有序数组的合并操作,解决了直接分割可能导致的顺序错误问题。利用二分查找在副对角线上找到分割点,有效地进行数组切分。此外,针对GPU环境,论文提出了使用CSR格式避免格式转换的开销,以实现稀疏矩阵非零元素的均衡划分,但未突破内存带宽限制。
论文探讨了如何通过MergePath策略并行化两个有序数组的合并操作,解决了直接分割可能导致的顺序错误问题。利用二分查找在副对角线上找到分割点,有效地进行数组切分。此外,针对GPU环境,论文提出了使用CSR格式避免格式转换的开销,以实现稀疏矩阵非零元素的均衡划分,但未突破内存带宽限制。
这篇论文是来自NVDIA公司,非常短,只有两页,直接看有点难理解。里面一个很重要的思想来自于另一篇论文“Merge Path - Parallel Merging Made Simple”(论文链接),我先讲这个。
这篇论文讲的是如何将两个有序数组合并的操作并行化。一个很直觉的方式是将两个数组都分成两半,然后分别归并,最后将归并的结果连接到一起。但是这个方法是错的,比如A = 1, 2, 3, 4,B = 7, 8, 9, 10,分成两半分别归并,得到1, 2, 7, 8和3, 4, 9, 10,连到一起变成1,2,7,8,3,4,9,10,并不是升序的。所以选好切分点很重要,选不好结果就是错的。
文中给出了一种分割的方法,并且给出了很直观的证明。
首先将两个有序数组排成如下形状:
从左上角开始,比较两数组对应元素哪个小,谁小往哪个方向拐,只能向右或者下。这样就形成了一条路径,叫做merge path。在merge path上任取一点,比如(1,3)这个点吧,对应一个矩形,也对应两数组的几个数字,17和3、5、12。这样的切分是可以的,这个merge path就是归并的道路,每次把最小的拿出来,所以17和3、5、12比其他所有数字都小。
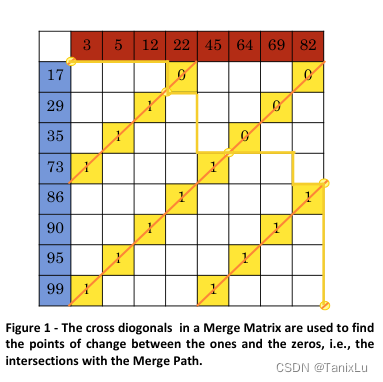
那么我们划一条副对角线,怎么知道和merge path的交点在哪呢?来看下面这一张图:
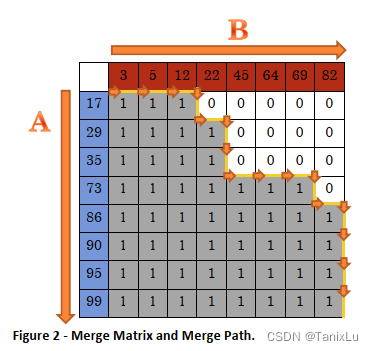
我们把这个矩阵(叫做merge matrix)中填上1或者0,1代表对应位置元素A大于B,0代表对应位置元素B大于A。我们会发现merge path恰好就沿着所有1的边。其实也很好理解,只有右下角位置在矩阵内,且为0的时候,才会向下拐。
我们观察一条副对角线,发现每条副对角线都是一段连续的1和一段连续的0(都有可能为空)。如Figure 1刚才举得那个例子,副对角线上是1,1,1,0。
知道这样的性质之后,就可以用二分查找很高效地在副对角线上查找和merge path的交点,以完成分割。
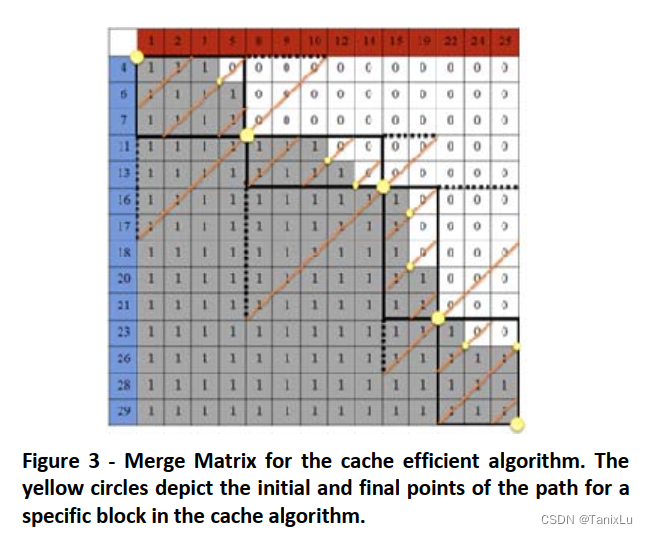
论文后面讲了如何更好地利用cache。假设cache大小为C(能存C个A或B的元素)。那么设L=C/3,每次切L长度的A+B,如下图中较长的黄线。然后切出来的部分比较少,所有操作是可以全在cache中完成的。切出来的部分是黑线框出来的部分,如第一个3x4的矩阵。将这个矩阵分成p个部分,p为处理器数量,实现并行。这种方法针对的是PRAM类的系统,也就是说有一个共享的内存,和一个共享的cache。
好了,可以讲会原来那篇论文了,该论文用的是CSR格式,这样就避免了格式转化带来的overload:
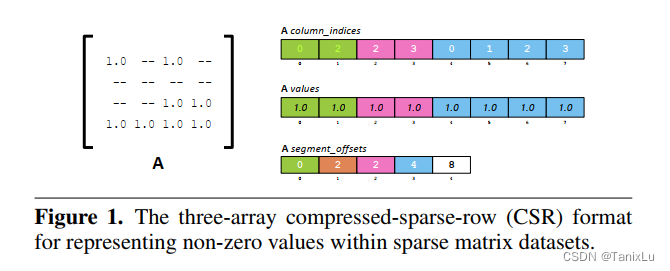
它的目标是将values这个代表所有非零元素的数组等量切分,以求达到不错的负载均衡。这篇论文是针对GPU的,需要提前说明一下。然后论文中给出了这一张图:
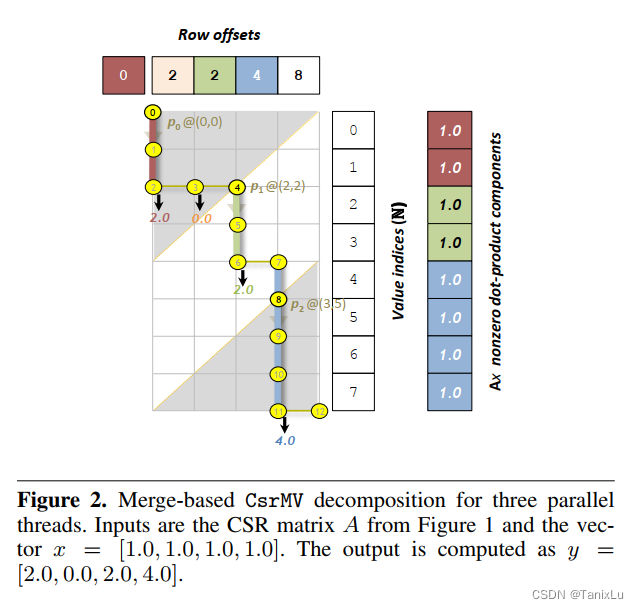
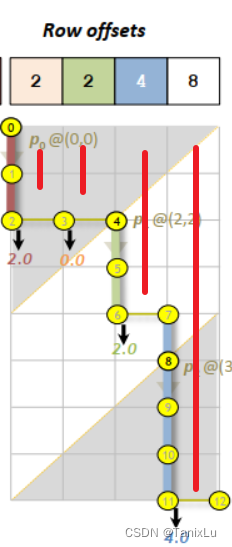
如果没看过上面那篇论文还真看不明白。这个CsrMV把Row offsets和value indices摆在了一起,形成一个矩阵。它这样做的原因是,CSR格式就是一个row offset,对应一段value indices,可以想象一下拿掉一个row offset,就拿掉一组value indices,这个和归并是有一点像的。在CsrMV的图中,消耗value index是往下走,消耗row offset是往右走。这里面填的1、0就不像上一篇论文那样了,而是看纵坐标j和row offset的关系。看我下面这张图,row offsets是2, 2, 4, 8,下面的"0"的个数也是2, 2, 4, 8,这样我们又可以使用二分查找来找交点了。切分过后可能还有把一row切到不同核心的情况,后面算完还要加起来。
总结一下,这篇论文借助merge path(merge matrix)的思想,完成了对稀疏矩阵非零元的直接划分,以实现负载均衡。缺点是针对不同特征的矩阵,CSR可能依旧有压缩的空间,没有突破内存带宽的瓶颈。

















 2819
2819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









